







感知机算法
定义1:假设输入空间是 χ ⊆ R n \chi \subseteq R^{n} χ⊆Rn,输出空间为 γ \gamma γ={+1,-1}.输入x ∈ χ \in \chi ∈χ表示实例的特征向量,对应于输入空间的点;输出 y ∈ γ y\in \gamma y∈γ表示实例的类别。由输入空间到输出空间的如下函数 f ( x ) = s i g n ( w x + b ) f(x)=sign(\mathbf{w} \mathbf{x}+b) f(x)=sign(wx+b)称为感知机。其中 w x \mathbf{w} \mathbf{x} wx是向量乘积形式。我们只需要求得两个参数 w \mathbf{w} w和b,就可以获得感知机模型。
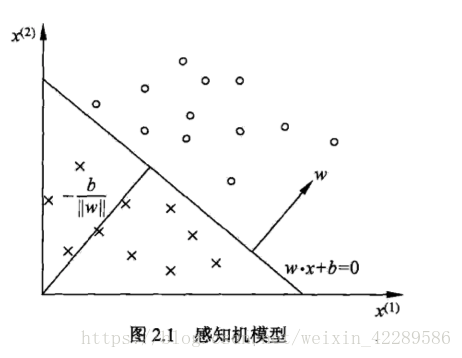
感知机有如下几何解释:线性方程 w x + b = 0 \mathbf{w} \mathbf{x}+b=0 wx+b=0对应于特征空间的一个超平面S,其中 w \mathbf{w} w是超平面的法向量,b是超平面的截距。位于两部分的点分别被分为正负两类,因此,超平面S称为分离超平面。
根据经验,需要定义损失函数并令损失函数最小化。对于感知机模型,损失函数选择误分类点到超平面的总距离。假设
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 4813
4813











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









