







TDOA观测模型
TDOA(Time Difference Of Arrival)即目标发送信号到达各个观测站的时间差,在三维直角坐标系下,TDOA观测示意图如图1所示。
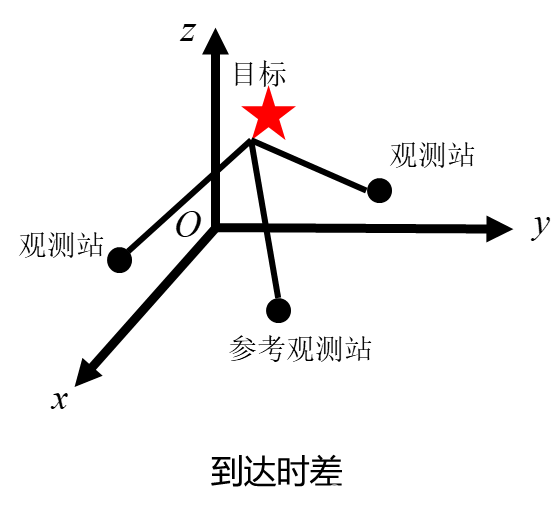
假设第 i i i个观测站的位置向量为 s i o = [ s i , x o , s i , y o , s i , z o ] T , 1 ≤ i ≤ M \boldsymbol s^o _i =[s^o_{i,x},s^o_{i,y},s^o_{i,z}]^T,1 \leq i\leq M sio=[si,xo,si,yo,si,zo]T,1≤i≤M,则将所有观测站向量组合得到总的观测站位置向量为 s o = [ s 1 o , s 2 o , . . . , s M o ] T \boldsymbol s^o =[\boldsymbol s_1^o,\boldsymbol s_2^o,...,\boldsymbol s_M^o]^T so=[s1o,s2o,...,sMo]T。目标位置向量定义为 u o = [ u x o , u y o , u z o ] T \boldsymbol u^o =[u^o_{x},u^o_{y},u^o_{z}]^T uo=[uxo,uyo,uzo]T。
为不失一般性,将第一个观测站作为参考观测站。因此,基于图1和定义的位置向量可以得到TDOA的计算方式为:
τ j 1 o = ∣ ∣ u o − s j o ∣ ∣ 2 c − ∣ ∣ u o − s 1 o ∣ ∣ 2 c , 2 ≤ j ≤ M (1) \tau_{j1}^o= \frac{||\boldsymbol{u}^o-\boldsymbol{s}_j^o||_2}{c}- \frac{||\boldsymbol{u}^o-\boldsymbol{s}_1^o||_2}{c} , 2\leq j \leq M \tag{1} τj1o=c∣∣uo−sjo∣∣2−c∣∣uo−s1o∣∣2,2≤j≤M(1)
τ j 1 o \tau_{j1}^o τj1o表示目标信号到达第 j j j个观测站和参考观测站的时间差真实值。其中 c c c表示信号传播速度,通常是已知的。因此可以将TDOA转换为到达距离差(Range Difference Of Arrival,RDOA):
r j 1 o = r j o − r 1 o = ∣ ∣ u o − s j o ∣ ∣ 2 − ∣ ∣ u o − s 1 o ∣ ∣ 2 , 2 ≤ j ≤ M (2) r_{j1}^o=r_{j}^o-r_{1}^o= ||\boldsymbol{u}^o-\boldsymbol{s}_j^o||_2 -||\boldsymbol{u}^o-\boldsymbol{s}_1^o||_2 , 2\leq j \leq M \tag{2} rj1o=rjo−r1o=∣∣uo−sjo∣∣2−∣∣uo−s1o∣∣2,2≤j≤M(2)
考虑观测噪声后得到:
r j 1 = r j 1 o + δ r j 1 (3) r_{j1}=r_{j1}^o+\delta{r_{j1}} \tag{3} rj1=rj1o+δrj1(3)
将所有观测站的观测值组合得到向量形式为:
r = r o + n r = [ r 21 o , r 31 o , . . . , r M 1 o ] T + [ δ r 21 , δ r 31 , . . . , δ r M 1 ] T (4) \boldsymbol{r}= \boldsymbol{r^o}+\boldsymbol{n}_{\boldsymbol{r}} =[r_{21}^o,r_{31}^o,...,r_{M1}^o]^T +[\delta{r_{21}},\delta{r_{31}},...,\delta{r_{M1}}]^T \tag{4} r=ro+nr=[r21o,r31o,...,rM1o]T+[δr21,δr31,...,δrM1]T(4)
其中 r o = [ r 21 o , r 31 o , . . . , r M 1 o ] T \boldsymbol{r^o} =[r_{21}^o,r_{31}^o,...,r_{M1}^o]^T ro=[r21o,r31o,...,rM1o]T表示真实值观测向量, n r = [ δ r 21 , δ r 31 , . . . , δ r M 1 ] T \boldsymbol{n}_{\boldsymbol{r}} =[\delta{r_{21}},\delta{r_{31}},...,\delta{r_{M1}}]^T nr=[δr21,δr31,...,δrM1]T表示观测噪声向量。其中 n r \boldsymbol{n}_{\boldsymbol{r}} nr的协方差矩阵记为 Q r \boldsymbol{Q}_{\boldsymbol{r}} Qr。
TDOA定位CRLB
未知参数向量为 u o = [ u x o , u y o , u z o ] T \boldsymbol{u^o} =[u^o_{x},u^o_{y},u^o_{z}]^T uo=[uxo,uyo,uzo]T,测量向量为 r \boldsymbol{r} r 。因此 r \boldsymbol{r} r关于 u o = [ u x o , u y o , u z o ] T \boldsymbol{u^o} =[u^o_{x},u^o_{y},u^o_{z}]^T uo=[uxo,uyo,uzo]T的对数似然函数为:
l n ( p ( r ∣ u o ) ) = κ − ( 1 / 2 ) ( r − r o ) T Q r − 1 ( r − r o ) (5) ln(p(\boldsymbol{r}|\boldsymbol{u^o})) =\kappa -(1/2)(\boldsymbol{r}-\boldsymbol{r}^o)^T \boldsymbol{Q}_{\boldsymbol{r}}^{-1} (\boldsymbol{r}-\boldsymbol{r}^o) \tag{5} ln(p(r∣uo))=κ−(1/2)(r−ro)TQr−1(r−ro)(5)
其中 κ \kappa κ表示常数项。
则CRLB表示为:
C R L B = ( ( ∂ r o ∂ ( u o ) T ) Q r − 1 ( ∂ r o ∂ ( u o ) T ) T ) − 1 (6) \boldsymbol{CRLB}=\left( \left( \frac {\partial \boldsymbol{r}^o}{\partial (\boldsymbol{u^o})^T} \right) \boldsymbol{Q}_{\boldsymbol{r}}^{-1} \left( \frac {\partial \boldsymbol{r}^o}{\partial (\boldsymbol{u^o})^T} \right)^T \right)^{-1} \tag{6} CRLB=((∂(uo)T∂ro)Qr−1(∂(uo)T∂ro)T
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 7743
7743











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











