







DOA观测模型
三维直角坐标系下,利用 M 个观测站对1个静止目标进行定位,定位示意图如图1所示。
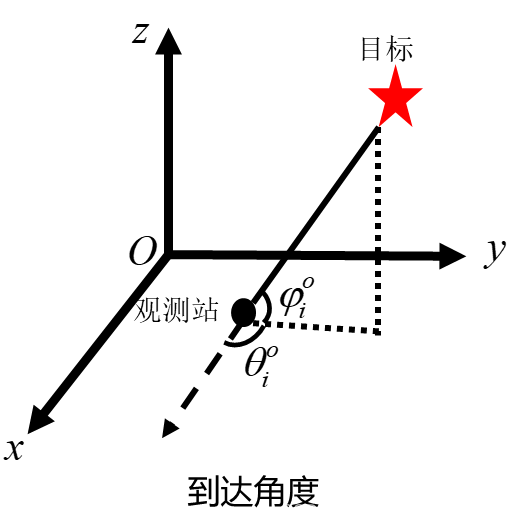
假设第 i个观测站的位置向量为 s i o = [ s i , x o , s i , y o , s i , z o ] T , 1 ≤ i ≤ M \boldsymbol s^o _i =[s^o_{i,x},s^o_{i,y},s^o_{i,z}]^T,1 \leq i\leq M sio=[si,xo,si,yo,si,zo]T,1≤i≤M,则将所有观测站向量组合得到总的观测站位置向量为 s o = [ s 1 o , s 2 o , . . . , s M o ] T \boldsymbol s^o =[\boldsymbol s_1^o,\boldsymbol s_2^o,...,\boldsymbol s_M^o]^T so=[s1o,s2o,...,sMo]T。目标位置向量定义为 u o = [ u x o , u y o , u z o ] T \boldsymbol u^o =[u^o_{x},u^o_{y},u^o_{z}]^T uo=[uxo,uyo,uzo]T。
因此,基于图1和定义的位置向量可以得到DOA的计算方式为:
θ i o = a r c t a n ( u y o − s i , y o u x o − s i , x o ) (1) \theta^o_i =arctan \left( \frac{u^o_{y}-s^o_{i,y}} {
{u^o_{x}-s^o_{i,x}}} \right)\tag{1} θio=arctan(uxo−si,xouyo−si,yo)(1)
ϕ i o = a r c t a n ( u z o − s i , z o ( u x o − s i , x o ) 2 + ( u y o − s i , y o ) 2 ) ) (2) \phi ^o_i =arctan \left( \frac{u^o_{z}-s^o_{i,z}} {\sqrt{(u^o_{x}-s^o_{i,x})^2+(u^o_{y}-s^o_{i,y})^2}} ) \right) \tag{2} ϕio=arctan
(uxo−si,xo)2+(uyo−si,yo)2uzo−si,zo)
(2)
其中 θ i o \theta_i^o θio和 ϕ i o \phi_i^o ϕio分别表示目标到达第i个观测站的方位角和仰角的真实值。实际中存在测量噪声等误差,因此可以建立带有误差的测量向量为:
θ = [ θ 1 o , θ 2 o , . . . , θ M o ] T + [ δ θ 1 , δ θ 2 , . . . , δ θ M ] T = θ o + n 1 (3) \boldsymbol {\theta} =[\theta^o_1,\theta^o_2,...,\theta^o_M]^T+[\delta \theta_1,\delta \theta_2,...,\delta \theta_M]^T=\boldsymbol \theta^o+\boldsymbol n_1\tag{3} θ=[θ1o,θ2o,...,θMo]T+[δθ1,δθ2,...,δθM]T=θo+n1(3)
ϕ = [ ϕ 1 o , ϕ 2 o , . . . , ϕ M o ] T + [ δ ϕ 1 , δ ϕ 2 , . . . , δ ϕ M ] T = ϕ o + n 2 (4) \boldsymbol \phi =[\phi ^o_1,\phi ^o_2,...,\phi ^o_M]^T+[\delta \phi _1,\delta \phi _2,...,\delta \phi _M]^T=\boldsymbol \phi^o+\boldsymbol n_2\tag{4} ϕ=[ϕ1o,ϕ2o,...,ϕMo]T+[δϕ1,δϕ2,...,δϕM]T=ϕo+n2(4)
其中 θ o = [ θ 1 o , θ 2 o , . . . , θ M o ] T \boldsymbol \theta^o=[\theta^o_1,\theta^o_2,...,\theta^o_M]^T θo=[θ1o,θ2o,...,θMo]T表示方位角真实值向量, ϕ o = [ ϕ 1 o , ϕ 2 o , . . . , ϕ M o ] T \boldsymbol \phi^o=[\phi ^o_1,\phi ^o_2,...,\phi ^o_M]^T ϕo=[ϕ1o,ϕ2o,...,ϕMo]T表示方位角真实值向量。 n 1 = [ δ θ 1 , δ θ 2 , . . . , δ θ M ] T \boldsymbol n_1=[\delta \theta_1,\delta \theta_2,...,\delta \theta_M]^T n1=[δθ1,δθ2,...,δθM]T表示方位角测量误差向量,协方差矩阵记为 Q θ = E [ n 1 n 1 T ] \boldsymbol Q_{\boldsymbol {\theta}}=E[\boldsymbol n_1\boldsymbol n_1^T] Qθ=E[n1n1T]。 n 2 = [ δ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 574
574











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











