






In mathematical optimization, the Rosenbrock function is a non-convex function, introduced by Howard H. Rosenbrockin 1960, which is used as a performance test problem for optimization algorithms.[1] It is also known as Rosenbrock's valley or Rosenbrock's banana function.
The global minimum is inside a long, narrow, parabolic shaped flat valley. To find the valley is trivial. To converge to the global minimum, however, is difficult.
The function is defined by
{\displaystyle f(x,y)=(a-x)^{2}+b(y-x^{2})^{2}}

It has a global minimum at {\displaystyle (x,y)=(a,a^{2})}




Two variants are commonly encountered.

Animation of Rosenbrock's function of three variables. [2]
One is the sum of {\displaystyle N/2}

{\displaystyle f(\mathbf {x} )=f(x_{1},x_{2},\dots ,x_{N})=\sum _{i=1}^{N/2}\left[100(x_{2i-1}^{2}-x_{2i})^{2}+(x_{2i-1}-1)^{2}\right].}![f({\mathbf {x}})=f(x_{1},x_{2},\dots ,x_{N})=\sum _{{i=1}}^{{N/2}}\left[100(x_{{2i-1}}^{2}-x_{{2i}})^{2}+(x_{{2i-1}}-1)^{2}\right].](https://wikimedia.org/api/rest_v1/media/math/render/svg/4793c1eb9633dd26a5b848f5b4c794cba19ccb18)
This variant has predictably simple solutions.
A second, more involved variant is
{\displaystyle f(\mathbf {x} )=\sum _{i=1}^{N-1}[100(x_{i+1}-x_{i}^{2})^{2}+(1-x_{i})^{2}]\quad {\mbox{where}}\quad \mathbf {x} =[x_{1},\ldots ,x_{N}]\in \mathbb {R} ^{N}.}![{\displaystyle f(\mathbf {x} )=\sum _{i=1}^{N-1}[100(x_{i+1}-x_{i}^{2})^{2}+(1-x_{i})^{2}]\quad {\mbox{where}}\quad \mathbf {x} =[x_{1},\ldots ,x_{N}]\in \mathbb {R} ^{N}.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/c9688b6c5e06ecadd7a7b88800dc89a8c95f1140)
has exactly one minimum for {\displaystyle N=3}





Optimization examples[edit]


最速下降法(又称梯度法,或Steepest Descent),是无约束最优化领域中最简单的算法,单独就这种算法来看,属于早就“过时”了的一种算法。但是,它的理念是其他某些算法的组成部分,或者说是在其他某些算法中,也有最速下降法的“影子”。因此,我们还是有必要学习一下的。
『1』名字释义
最速下降法只使用目标函数的一阶导数信息——从“梯度法”这个名字也可见一斑。并且,它的本意是取目标函数值“最快下降”的方向作为搜索方向。于是我们就想知道这个问题的答案:沿什么方向,目标函数 f(x)的值下降最快呢?
『2』函数值下降最快的方向
先说结论:沿负梯度方向 d=−gk ,函数值下降最快。
下面就来推导一下。
将目标函数 f(x) 在点 xk 处泰勒展开(这是我们惯用的“伎俩”了)——
f(x)=f(xk)+αgTkdk+o(α)
高阶无穷小 o(α) 可忽略,由于我们定义了步长 α>0 ,因此,当 gTkdk<0 时, f(x)<f(xk) ,即函数值是下降的。此时 dk 就是一个下降方向。
但是 dk 具体等于什么的时候,可使目标函数值下降最快呢?
由Cauchy-Schwartz不等式(柯西-许瓦兹不等式)可得:
∣∣dTkgk∣∣≤∥dk∥∥gk∥
当且仅当 dk=gk 时,等号成立, dTkgk 最大(>0)。
所以 dk=−gk 时, dTkgk 最小(<0), f(x) 下降量最大。
所以 −gk 是最快速下降方向。
『3』缺点
它真的“最快速”吗?答案是否定的。
事实是,它只在局部范围内具有“最速”性质。
对整体求解过程而言,它的下降非常缓慢。
『4』感受一下它是如何“慢”的
先来看一幅图
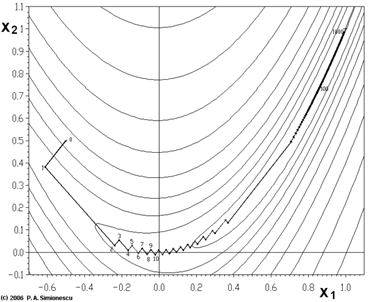
这幅图表示的是对一个目标函数的寻优过程,图中锯齿状的路线就是寻优路线在二维平面上的投影。
这个函数的表达式是:
f(x1,x2)=(1−x1)2+100⋅(x2−x12)2
它叫做Rosenbrock function(罗森布罗克方程),是个非凸函数,在最优化领域,它通常被用来作为一个最优化算法的performance test函数。
我们来看一看它在三维空间中的图形:
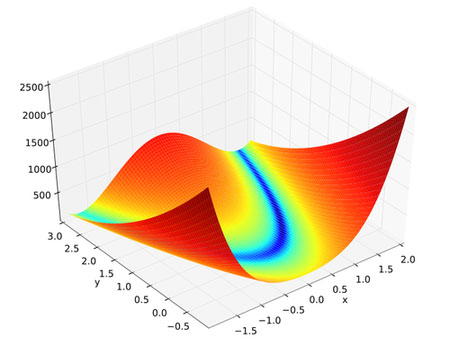
它的全局最优点位于一个长长的、狭窄的、抛物线形状的、扁平的“山谷”中。
找到“山谷”并不难,难的是收敛到全局最优解(全局最优解在 (1,1) 处)。
正所谓:世界上最遥远的距离,不是你离我千山万水,而是你就在我眼前,我却要跨越千万步,才能找到你。
我们再来看另一个目标函数 f(x,y)=sin(12x2−14y2+3)cos(2x+1−ey) 的寻优过程:
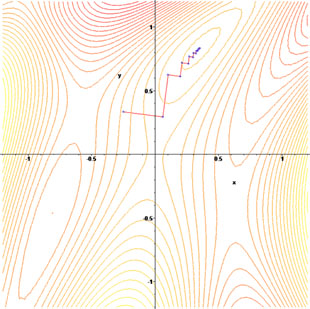
和前面的Rosenbrock function一样,它的寻优过程也是“锯齿状”的。
它在三维空间中的图形是这样的:
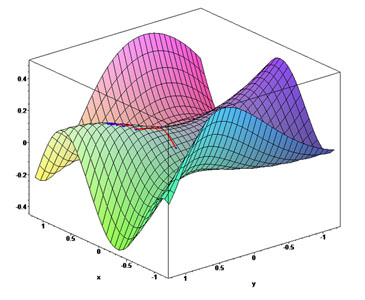
总而言之就是:当目标函数的等值线接近于圆(球)时,下降较快;等值线类似于扁长的椭球时,一开始快,后来很慢。
『5』为什么“慢”的分析
上面花花绿绿的图确实很好看,我们看到了那些寻优过程有多么“惨烈”——太艰辛了不是么?
但不能光看热闹,还要分析一下——为什么会这样呢?
由精确line search满足的一阶必要条件,得:
∇f(xk+αkdk)Tdk=0 ,即 gTk+1dk=0
故由最速下降法的 dk=−gk 得:
gTk+1dk=gTk+1(−gk)=−gTk+1gk=−dTk+1dk=0⇒ dTk+1dk=0
即:相邻两次的搜索方向是相互直交的(投影到二维平面上,就是锯齿形状了)。
如果你非要问,为什么 dTk+1dk=0 就表明这两个向量是相互直交的?那么我就耐心地再解释一下:
由两向量夹角的公式:
=> θ=π2
两向量夹角为90度,因此它们直交。
『6』优点
这个被我们说得一无是处的最速下降法真的就那么糟糕吗?其实它还是有优点的:程序简单,计算量小;并且对初始点没有特别的要求;此外,许多算法的初始/再开始方向都是最速下降方向(即负梯度方向)。
『7』收敛性及收敛速度
最速下降法具有整体收敛性——对初始点没有特殊要求。
采用精确线搜索的最速下降法的收敛速度:线性。
采用 Levmar 工具包分析用代码:
#include "stdafx.h"
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <float.h>
#include "levmar.h"
#define ROSD 105.0
/* Rosenbrock function, global minimum at (1, 1) */
void ros(double *p, double *x, int m, int n, void *data)
{
register int i;
for (i = 0; i<n; ++i)
x[i] = ((1.0 - p[0])*(1.0 - p[0]) + ROSD*(p[1] - p[0] * p[0])*(p[1] - p[0] * p[0]));
}
void jacros(double *p, double *jac, int m, int n, void *data)
{
register int i, j;
for (i = j = 0; i<n; ++i) {
jac[j++] = (-2 + 2 * p[0] - 4 * ROSD*(p[1] - p[0] * p[0])*p[0]);
jac[j++] = (2 * ROSD*(p[1] - p[0] * p[0]));
}
}
#define MODROSLAM 1E02
/* Modified Rosenbrock problem, global minimum at (1, 1) */
void modros(double *p, double *x, int m, int n, void *data)
{
register int i;
for (i = 0; i<n; i += 3) {
x[i] = 10 * (p[1] - p[0] * p[0]);
x[i + 1] = 1.0 - p[0];
x[i + 2] = MODROSLAM;
}
}
void jacmodros(double *p, double *jac, int m, int n, void *data)
{
register int i, j;
for (i = j = 0; i<n; i += 3) {
jac[j++] = -20.0*p[0];
jac[j++] = 10.0;
jac[j++] = -1.0;
jac[j++] = 0.0;
jac[j++] = 0.0;
jac[j++] = 0.0;
}
}
int main()
{
register int i, j;
int problem, ret;
double p[5], // 5 is max(2, 3, 5)
x[16]; // 16 is max(2, 3, 5, 6, 16)
int m, n;
double opts[LM_OPTS_SZ], info[LM_INFO_SZ];
opts[0] = LM_INIT_MU; opts[1] = 1E-15; opts[2] = 1E-15; opts[3] = 1E-20;
opts[4] = LM_DIFF_DELTA; // relevant only if the Jacobian is approximated using finite differences; specifies forward differencing
//opts[4]=-LM_DIFF_DELTA; // specifies central differencing to approximate Jacobian; more accurate but more expensive to compute!
/* modified Rosenbrock problem */
m = 2; n = 3;
p[0] = -1.2; p[1] = 1.0;
for (i = 0; i<n; i++) x[i] = 0.0;
ret = dlevmar_der(modros, jacmodros, p, x, m, n, 1000, opts, info, NULL, NULL, NULL); // with analytic Jacobian
//ret=dlevmar_dif(modros, p, x, m, n, 1000, opts, info, NULL, NULL, NULL); // no Jacobian
printf("Levenberg-Marquardt returned %d in %g iter, reason %g\nSolution: ", ret, info[5], info[6]);
for (i = 0; i<m; ++i)
printf("%.7g ", p[i]);
printf("\n\nMinimization info:\n");
for (i = 0; i<LM_INFO_SZ; ++i)
printf("%g ", info[i]);
printf("\n");
getchar();
return 0;
}
运行结果:

可以可看到迭代了14次后,最终求出来的(x,y)已经非常接近(1,1)了。

















 1365
1365

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









