






目录
一.前沿
上一篇文章介绍了基于秩1的拟牛顿算法,紧接上文,这次我们介绍关于秩2的拟牛顿算法,即BFGS算法。为啥叫BFGS算法,是因为这个鬼算法是由Broyden、Fletcher、Goldforb和Shanno这四个大佬发明的,BFGS校正算法是目前最流行,也是最有效的拟牛顿校正。
二.基本思想
拟牛顿法的基本思想是把牛顿法中用到的Hess阵用一个Hk矩阵来代替。那么Hk是什么呢?Hk的三个特点如下:
(1)Hk近似等于牛顿法中的Hess阵,这样可以保证拟牛顿发所产生的方向与牛顿反向近似,从而保证了拟牛顿法的收敛速度。
(2)Hk是正定的
(3)Hk的更新规则有两种,即用秩1或秩2的矩阵矫正。上篇文章介绍的是秩1算法,所以这篇文章介绍秩2算法。(秩1秩2法其实就是两个更新Hk的不同公式,应该是记住就行了吧,反正推导我也看不懂)。
三.秩2校正公式
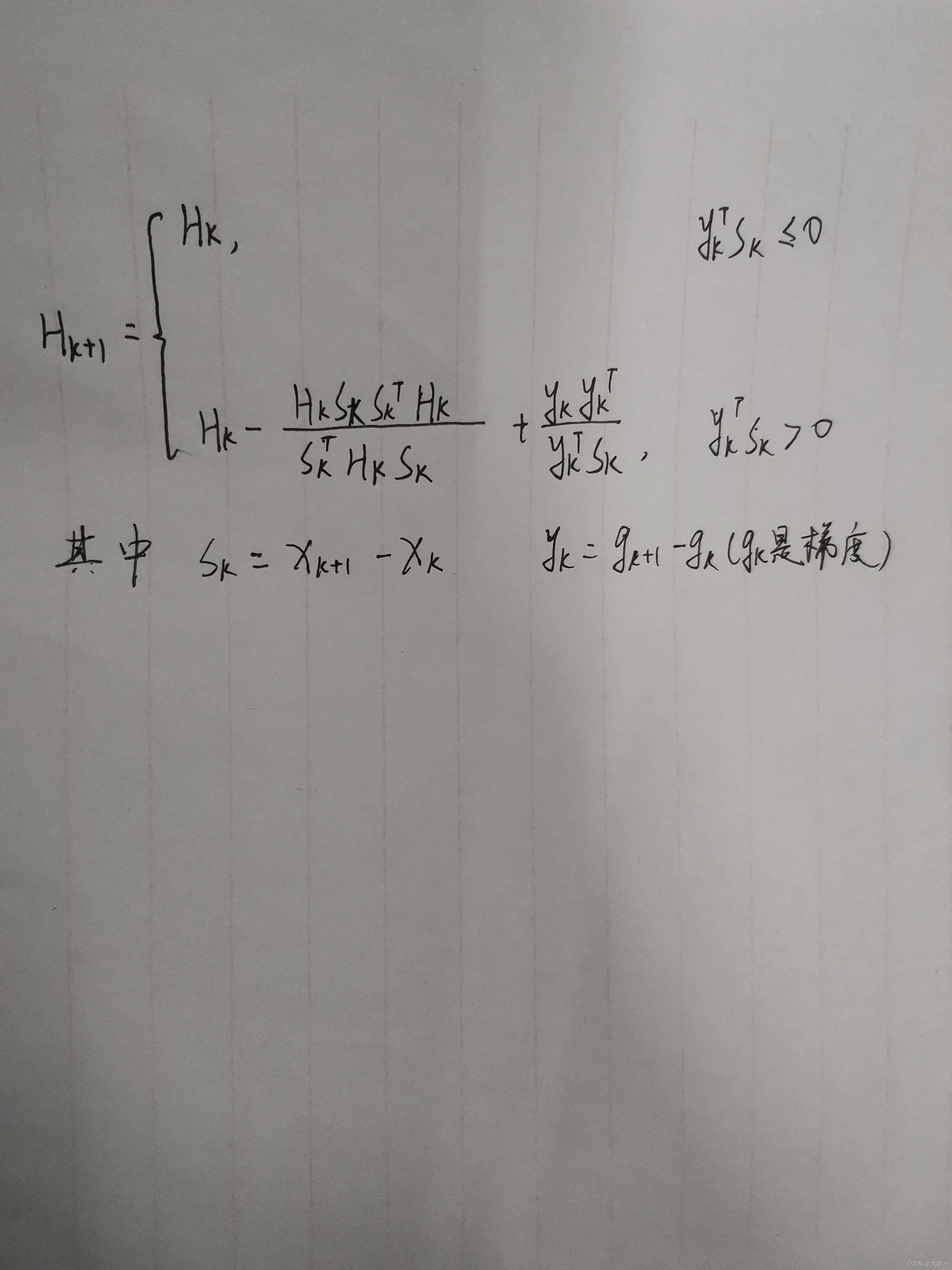
在做matlab仿真时,H0通常用一个单位矩阵来代替。经过一次迭代后,Hk的秩2矫正公式如下(手写吧,打公式太痛苦了):
四.算法步骤
步0:确定终止误差e=(0~1),设初始点x0,=(0~1),
=(0,0.5),初始对称正定阵H0=I(单位阵),令k=0
步1:计算gk=f(xk).若||gk||<=e,停算,输出xk作为最优解。否则,转步2
步2:解线性方程组 Hk*dk= -gk,解出dk(即得出搜索方向)
步3:用Armjio搜索技术求步长k=
^mk,m的值从0开始,
若f(xk+ ^m*dk)<=f(xk)+
*
^m*gk'dk
则 mk=m,步长k=
^mk,若不满足上式,则m=m+1,直到满足上述不等式为止
步4:令Xk+1=xk+ k*dk
步5:由校正公式确定Hk+1,即上图所示。令k=k+1,转步1
五.matlab程序实现
BFGS封装函数:
function [x,val,k]=bfgs(fun,gfun,x0,varargin)
k=0;
maxk=500;
rho=0.55;
sigma=0.4;
e=1e-5;%精度
n=length(x0);
Hk=eye(n);
while(k<maxk)
gk=feval(gfun,x0,varargin{:});
if(norm(gk)<e),break;end
dk=-Hk\gk;%在后面会更新Hk
m=0;
mk=0;
while(m<20)
s=feval(fun,x0+rho^m*dk,varargin{:});
a=feval(fun,x0)+sigma*rho^m*gk'*dk;
if(s<a)
mk=m;
break;
end
m=m+1;
end
x=x0+dk*rho^mk;
sk=x-x0;
yk=feval(gfun,x,varargin{:})-gk;
if(yk'*sk>0)
Hk=Hk-(Hk*sk*sk'*Hk)/(sk'*Hk*sk)+(yk*yk')/(yk'*yk);
end
x0=x;
k=k+1;
end
val=feval(fun,x0,varargin{:});
end其中fun,gfun,main函数在上篇文章都有。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









