






DDPG,全称是deep deterministic policy gradient,深度确定性策略梯度算法。
deep很好理解,就是用深度网络。policy gradient我们也学过了。
那什么叫deterministic确定性呢?其实DDPG也是解决连续控制型问题的的一个算法,不过和PPO不一样,PPO输出的是一个策略,也就是一个概率分布,而DDPG输出的直接是一个动作。
DDPG和PPO一样,也是AC的架构。加上名字上有PG字眼,所以在学习的时候,很多人会以为DDPG就是只输出一个动作的PPO,所以直接省去了impotance sampling等一堆麻烦的事情。
但个人认为,两者的思路是完全不一样的,DDPG更接近DQN,是用一个actor去弥补DQN不能处理连续控制性问题的缺点。
这一点要非常注意,是非常容易混淆的一点。
如果你对DQN还不太了解,请一下这两篇关于DQN的专栏:
张斯俊:三维可视化助你直观理解DQN算法[DQN理论篇]zhuanlan.zhihu.com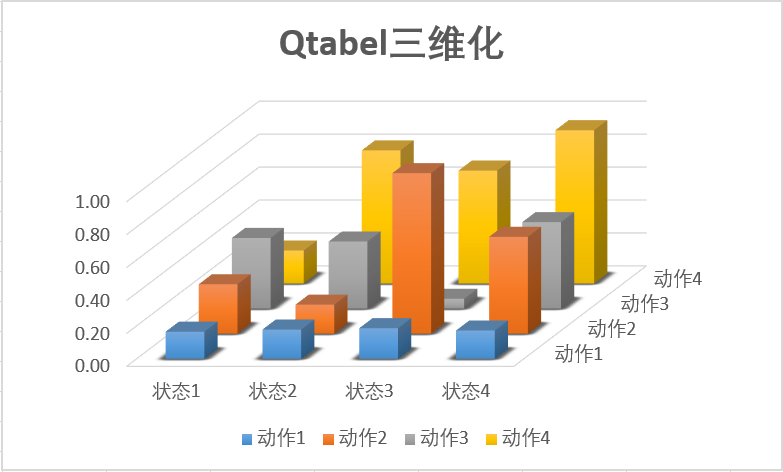
DDPG 和 DQN
我们先来回顾DQN。DQN是更新的动作的q值:
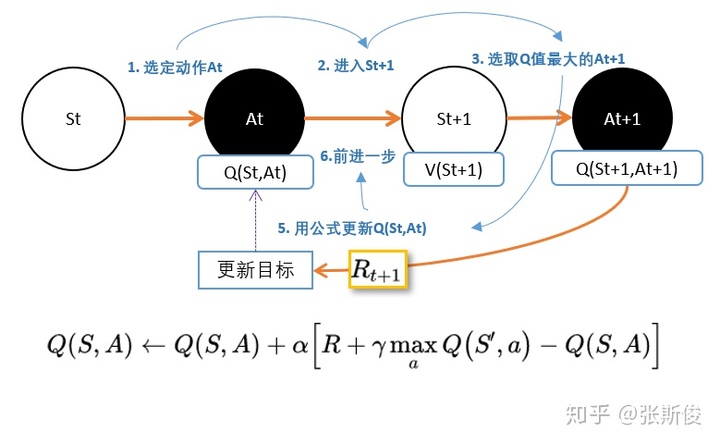
我们从公式中也能看出,DQN不能用于连续控制问题原因,是因为maxQ(s',a')函数只能处理离散型的。那怎么办?
我们知道DQN用magic函数,也就是神经网络解决了Qlearning不能解决的连续状态空间问题。那我们同样的DDPG就是用magic解决DQN不能解决的连续控制型问题就好了。
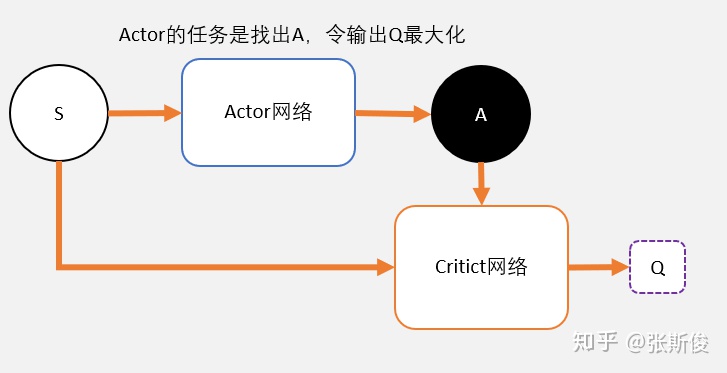
也就是说,用一个magic函数,直接替代maxQ(s',a')的功能。也就是说,我们期待我们输入状态s,magic函数返回我们动作action的取值,这个取值能够让q值最大。这个就是DDPG中的Actor的功能。
我们可以这样形象地理解DDPG。
我们之前讲DQN也说过,DQN的深度网络,就像用一张布去覆盖Qlearning中的Qtable。这也是DDPG中Critic的功能。
示意图:
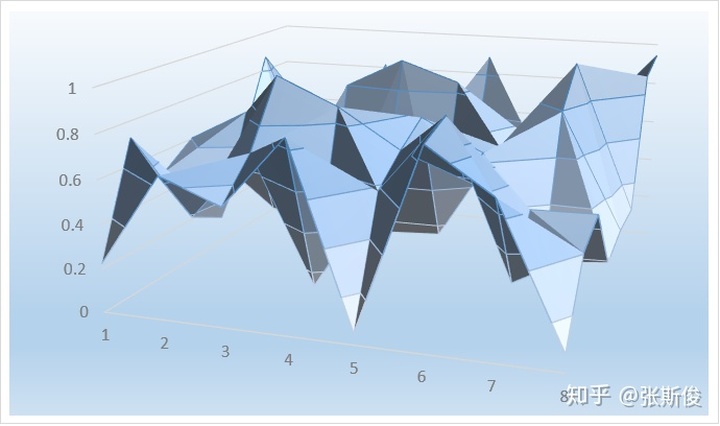
当我们把某个state输入到DDPG的Actor中的时候,相当于在这块布上做沿着state所在的位置剪开,这个时候大家会看到这个边缘是一条曲线。
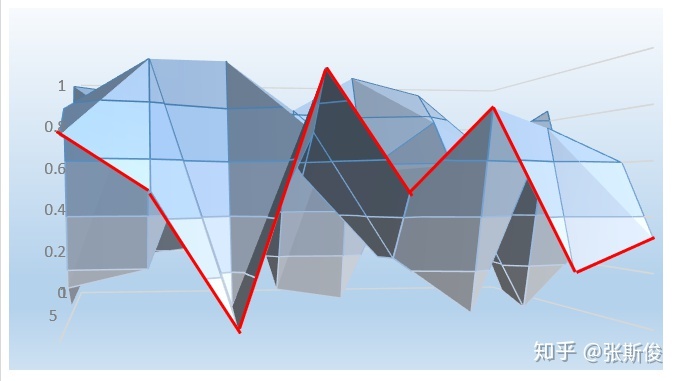
如上图中的红色曲线,这条曲线很像概率分布,但要一定注意,这里并不是策略,也不是PPO和AC中的V值。
是在某个状态下,选择某个动作值的时候,能获得的Q值。
Actor的任务就是在寻找这个曲线的最高点,然后返回能获得这个最高点,也是最大Q值的动作。
所以,DDPG其实并不是PG,并没有做带权重的梯度更新。而是在梯度上升,在寻找最大值。
这也就解释了,为什么DDPG是一个离线策略,但可以多次更新却不用importance sampling。这是因为这个算法就是DQN,和策略没有直接的关系。
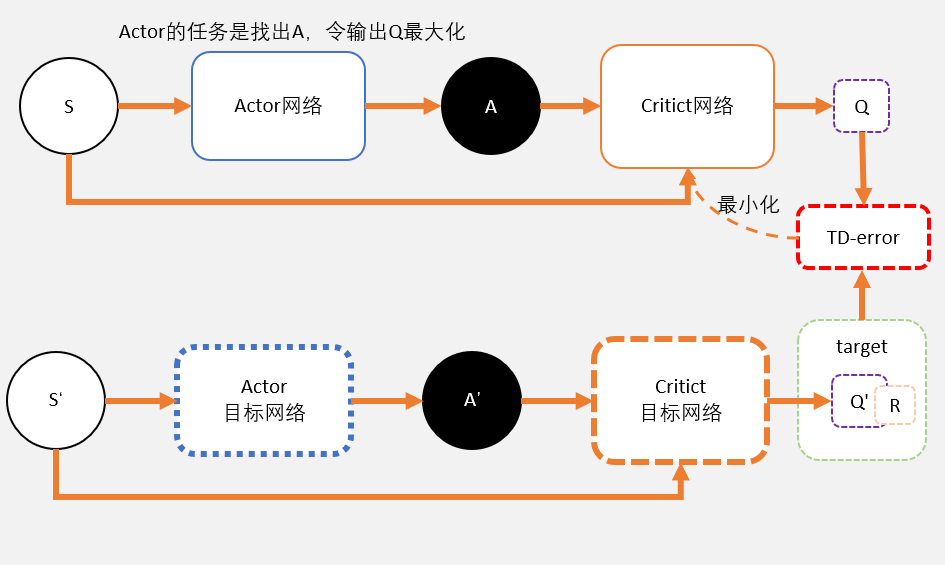
DDPG算法
我们现在整理:
Critic
- Critic网络的作用是预估Q,虽然它还叫Critic,但和AC中的Critic不一样,这里预估的是Q不是V;
- 注意Critic的输入有两个:动作和状态,需要一起输入到Critic中;
- Critic网络的loss其还是和AC一样,用的是TD-error。这里就不详细说明了,我详细大家学习了那么久,也知道为什么了。
Actor
- 和AC不同,Actor输出的是一个动作;
- Actor的功能是,输出一个动作A,这个动作A输入到Crititc后,能够获得最大的Q值。
- 所以Actor的更新方式和AC不同,不是用带权重梯度更新,而是用梯度上升。
弄清楚怎么来的,就不会和PPO混淆在一起了。也就明白为什么说DDPG是源于DQN而不是AC了。
所以,和DQN一样,更新的时候如果更新目标在不断变动,会造成更新困难。所以DDPG和DQN一样,用了固定网络(fix network)技术,就是先冻结住用来求target的网络。在更新之后,再把参数赋值到target网络。
所以在实做的时候,我们需要4个网络。actor, critic, Actor_target, cirtic_target。
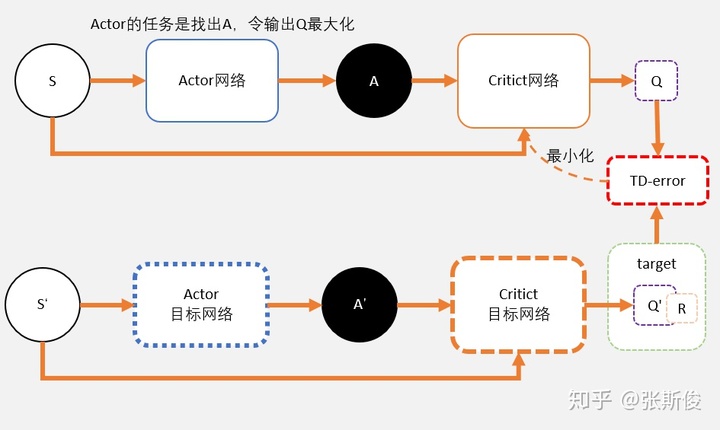
有的同学会搞混几个网络到底怎么用。其实只要记着一点:目标网络只是用在求target的过程中。如果不是求target用的,就不用目标网络。
示例代码
这一篇,我们以tensorflow给出的强化学习算法示例代码为例子,看看DDPG应该如何实现。
https://github.com/tensorlayer/tensorlayer/blob/master/examples/reinforcement_learning/tutorial_DDPG.pygithub.com如果一时间看代码有困难,可以看我的带注释版本。希望能帮助到你。
https://github.com/louisnino/RLcode/blob/master/tutorial_DDPG.pygithub.com神经网络
现在我们先看看actor的建立。
def get_actor(input_state_shape, name=''):
inputs = tl.layers.Input(input_state_shape, name='A_input')
x = tl.layers.Dense(n_units=30, act=tf.nn.relu, W_init=W_init, b_init=b_init, name='A_l1')(inputs)
x = tl.layers.Dense(n_units=a_dim, act=tf.nn.tanh, W_init=W_init, b_init=b_init, name='A_a')(x)
x = tl.layers.Lambda(lambda x: np.array(a_bound) * x)(x)
return tl.models.Model(inputs=inputs, outputs=x, name='Actor' + name)我们需要留意,actor最终输出的action有一定的范围,这个范围在环境中已经定义好。
我们可以用语句获取动作空间的取值范围: a_bound = env.action_space.high #action取值范围上限 a_bound = env.action_space.low #action取值范围下限
超过范围的action可能会导致程序异常。一种比较好的处理方式是,在网络末端,用tanh函数,把输出映射到[-1.0,1.0]之间。
然后通过Lamda层的lambda表达式,例如示例代码中:np.array(a_bound) * x ,把动作从[-1.0,1.0]映射到环境需要的取值范围。
Critic网络
def get_critic(input_state_shape, input_action_shape, name=''):
s = tl.layers.Input(input_state_shape, name='C_s_input')
a = tl.layers.Input(input_action_shape, name='C_a_input')
x = tl.layers.Concat(1)([s, a])
x = tl.layers.Dense(n_units=60, act=tf.nn.relu, W_init=W_init, b_init=b_init, name='C_l1')(x)
x = tl.layers.Dense(n_units=1, W_init=W_init, b_init=b_init, name='C_out')(x)
return tl.models.Model(inputs=[s, a], outputs=x, name='Critic' + name)Critic和DQN有些许不同,在DQN,我们会计算Q(s),把该state下的所有动作的q值都输出,然后从中挑选q值最大的一个动作。
而在DDPG,我们会把动作a也输出到network,由network去评判这个action的q值。所以我们需要把a和s一起放入到Critic中去。Q(s,a)
- 我们定义两个输入层,如示例代码中的s,a。
- 这两层会同时输入到下一层,所以我们用Concat层,把s,a的输出叠加起来,再输入到下一层。
- 最后我们记得在模型的input定义中输入两个输入:inputs=[s, a]即可。
主流程
for i in range(MAX_EPISODES):
s = env.reset()
for j in range(MAX_EP_STEPS):
a = ddpg.choose_action(s)
a = np.clip(np.random.normal(a, VAR), -2, 2)
s_, r, done, info = env.step(a)
ddpg.store_transition(s, a, r / 10, s_)
if ddpg.pointer > MEMORY_CAPACITY:
ddpg.learn()
s = s_ 我们把示例代码整理一下,可以获得以上的代码框架。我们说过,DDPG来源于DQN,是一种离线的算法。所以DDPG和DQN的更新流程几乎一样。
- 重置状态s
- 选择动作a
- 与环境互动,获得 s_, r, done 数据
- 保存数据
- 如果数据量足够,就对数据进行随机抽样,更新Actor和Critic
- 把s_赋值给s,开始新的一步
a = ddpg.choose_action(s)
a = np.clip(np.random.normal(a, VAR), -2, 2) 其中,我们重点关注这两行代码。
我们先看ddpg.choose_action(s),ddpg.choose_action(s)的功能很简单,就是把s整理一下,放入Actor网络,输出action。
但如何保证选出来的动作有足够的随机性,能够充分探索环境呢?DQN采用的是epsilon-greedy的算法。而DDPG用了正态分布抽样方式。
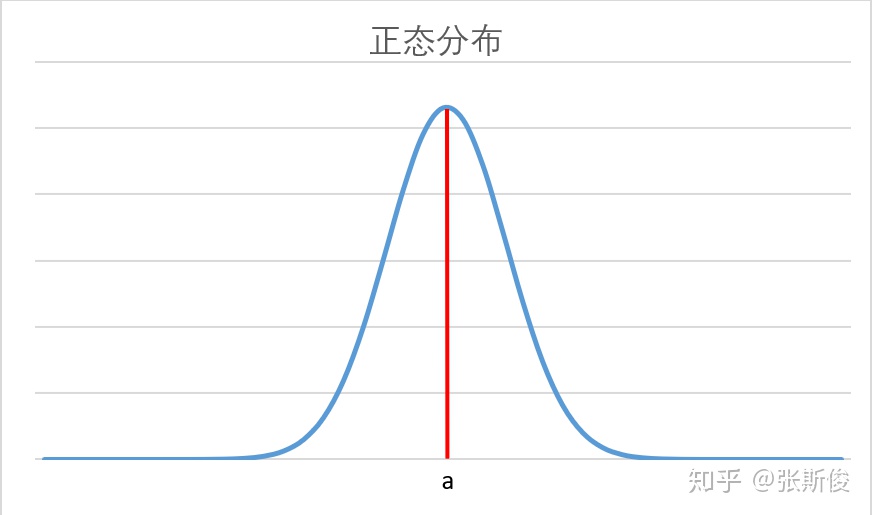
我们用输出的a作为一个正态分布的平均值,加上参数VAR,构造一个正态分布。然后从正态分布中随机出一个新的动作代替a。我们知道a作为正态分布的均值,也是一个有最大概率获得的一个值。这就有点像epsilon-greedy,有一定概率在探索,也有一定概率在开发新的动作。
我们可以用VAR来控制探索的程度: VAR越小,正态分布形状越“瘦”,选择a的概率会更大,开发的性质更多; VAR越大,正态分布形状越“胖”,选择a的概率会更小,探索的性质更多;
我们还可以动态控制VAR的大小,例如经过N轮的更新,就updata VAR,让智能体的开发行为更多一点。
值得注意的是,在训练好智能体之后,我们就不要再做探索了,把第二行代码去掉,直接用Actor输出的动作就可以了。
智能体学习
现在我们看learning函数。我把leaning函数分为三部分。我们先看第一部分,数据抽样。
#随机BATCH_SIZE个随机数
#1
indices = np.random.choice(MEMORY_CAPACITY, size=BATCH_SIZE)
#2
bt = self.memory[indices, :] #根据indices,选取数据bt,相当于随机
#3
bs = bt[:, :self.s_dim] #从bt获得数据s
ba = bt[:, self.s_dim:self.s_dim + self.a_dim] #从bt获得数据a
br = bt[:, -self.s_dim - 1:-self.s_dim] #从bt获得数据r
bs_ = bt[:, -self.s_dim:] #从bt获得数据s'我们之前学习过几种存储方式,其实都是大同小异的。大家可以用自己喜欢的方式。在示例代码中,作者直接用了一个矩阵,保存所有的数据。需要用的时候,再进行切分。
# 创建初始化memory
self.memory = np.zeros((MEMORY_CAPACITY, s_dim * 2 + a_dim + 1), dtype=np.float32)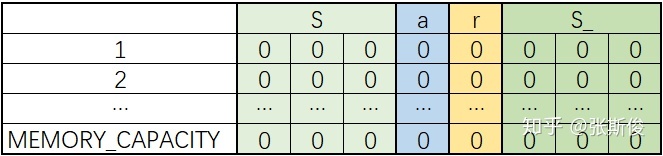
- 当我们要提取的时候,首先随机抽取一定的行号所谓索引(indices),例如batch个。
- 把这些数据抽出来
- 根据保存的顺序,把数据切割,恢复成bs,ba,br,bs_
Critic更新
with tf.GradientTape() as tape:
a_ = self.actor_target(bs_)
q_ = self.critic_target([bs_, a_])
y = br + GAMMA * q_
q = self.critic([bs, ba])
td_error = tf.losses.mean_squared_error(y, q)
c_grads = tape.gradient(td_error, self.critic.trainable_weights)
self.critic_opt.apply_gradients(zip(c_grads, self.critic.trainable_weights))Critic的更新原理和DQN是一样的。但在计算更新目标y的时候,记得用上target_net.
Actor更新
with tf.GradientTape() as tape:
a = self.actor(bs)
q = self.critic([bs, a])
a_loss = -tf.reduce_mean(q)
a_grads = tape.gradient(a_loss, self.actor.trainable_weights)
self.actor_opt.apply_gradients(zip(a_grads, self.actor.trainable_weights))在这里我们要注意,a_loss = -tf.reduce_mean(q) 前面的负号。这是和AC最大的不同之处。
在AC采用的是加权梯度方法,权重的方向,代表了更新的方向;权重越大,更新程度越大。
DDPG采用的是梯度上升的方法。可以理解为尝试去找一个最大值。由于和梯度下降方向相反,我们需要在loss加一个负号。
滑动平均值更新
按照DQN的方式,我们需要把更新后的参数赋值给target network的参数。我们称这种更新为“硬更新”。在示例代码中,采用了另外一种更新方式,“滑动平均值更新”。
滑动平均值的计算原理也并不复杂:新加入的元素 和 旧的平均值 以一定比例混合成新的平均值。当然,这两者比例加起来会等于1.
新的平均值 = 旧的平均值 * 比例 + 新加入元素 * 比例

我们观察表格,就能发现移动平均值的特点: 1.虽然移动平均值和真实平均值有一定差距,但在新元素和旧平均值相差不大的情况下,是趋于均值的。 2.不需要保存所有的元素,也不需要保存元素个数,只需要保存一个旧均值就可以了。这个旧均值有时候我们会称为影子。 3.即使有个别元素比较大,对均值的影响还是比较“温和”的。不会造成巨大的跳变。
第三点是我们最想要的性质。我们之前说过,我们需要targetnetwork的原因,是不希望在更新的同时,目标也同时移动,这相当于在打“移动靶”。所以我们把靶子固定住,这样我们就可以减少更新的难度。
但如果我们采用硬更新的方式,每次靶子出现的地方都相差很远。这同样不利于我们更新。所以我们限制一下前后两个靶的差距,希望不要造成巨大的跳变。这也更新起来就更顺畅了。
示例代码中,滑动平均值的计算直接用tensorflow的工具.ExponentialMovingAverage。
其中decay就是比例。我们用TAU表示新加入元素的混合比例。1-TAU,就是旧平均值的比例。
#建立ema,滑动平均值
self.ema = tf.train.ExponentialMovingAverage(decay=1 - TAU) # soft replacement
def ema_update(self):
#1
paras = self.actor.trainable_weights + self.critic.trainable_weights #获取要更新的参数
self.ema.apply(paras)
#2
for i, j in zip(self.actor_target.trainable_weights + self.critic_target.trainable_weights, paras):
i.assign(self.ema.average(j)) # 用滑动平均赋值- 使用的时候,我们先要确定我们要更新的变量,并使用apply,添加相应影子(旧均值)副本。
- 和硬更新一样,我们把变量一一对应并更新,但在更新之前,先计算滑动均值,再赋值到target。
个人觉得,tensorflow自带的工具虽然方便,但其实不利于理解,对于初学者来说会感觉有"神秘"。其实在下一章TD3中也用到了滑动平均值更新这项技术。但代码更简明。
代码中,除了先计算滑动平均值外,其余代码其实和硬更新是一样的。
def target_soft_update(self, net, target_net, soft_tau):
''' soft update the target net with Polyak averaging '''
for target_param, param in zip(target_net.trainable_weights, net.trainable_weights):
target_param.assign( # copy weight value into target parameters
target_param * (1.0 - soft_tau) + param * soft_tau
# 旧的平均值 * (1 - 新元素比例) + 新加入元素 * 新元素比例
)
return target_net总结
现在我们来总结一下 1. DDPG源于DQN,而不是源于AC。这一点要搞清楚。 2. Actor用的是梯度上升,而不是带权重的梯度更新; 3. 虽然Critic和AC一样,都是用td-error来更新;但AC的critic预估的是V,DDPG预估的是Q
好了,在下一篇,我们会进入TD3,就是DDPG的进化版。但如果你已经理解了DDPG,那么TD3也很容易理解了。下篇见。
如果专栏对你有用,请点赞并关注在下喔。如果发现有问题,也可以在文章下留言。
你的每一点关注,都是在下的继续努力的动力来源!感激!
白话强化学习zhuanlan.zhihu.com















 723
723











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









