







目录
23.1Exynos4412


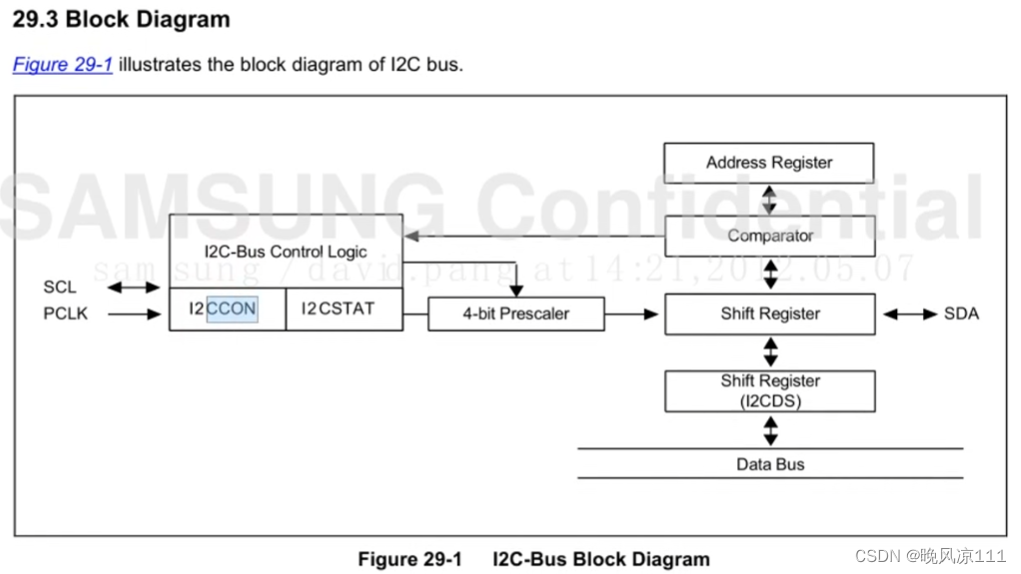


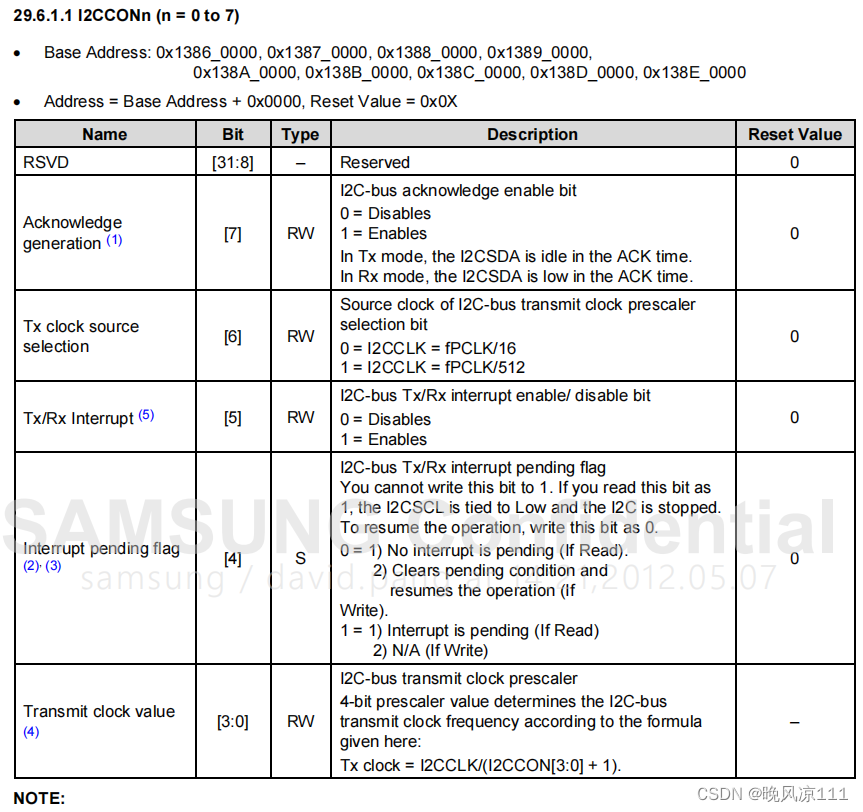
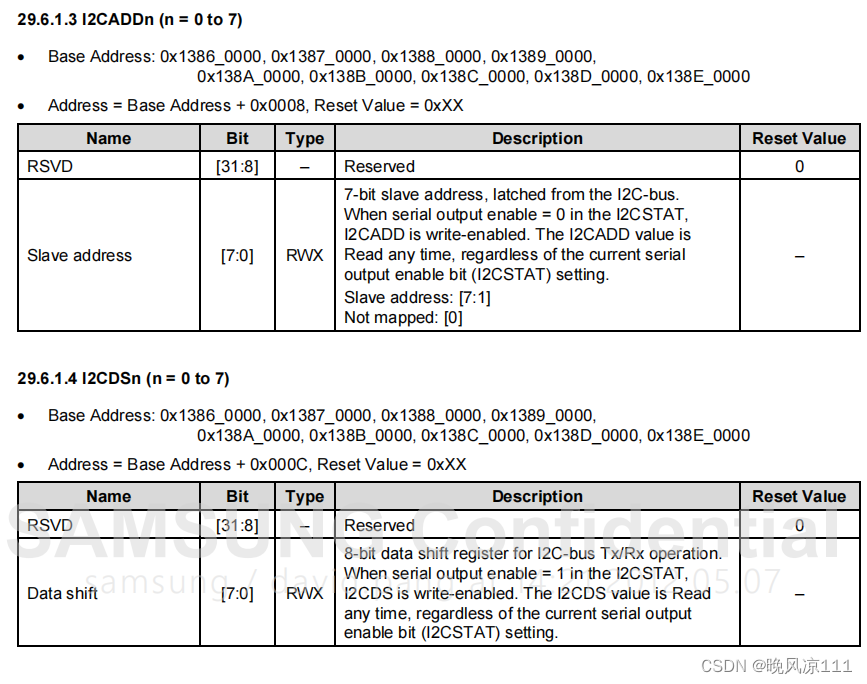
23.2IIC寄存器详解


23.3MPU6050原理
MPU6050是一个运动处理传感器,其内部集成了3轴加速度传感器 和3轴陀螺仪(角速度传感器),以及一个可扩展数字运动处理器。

MPU6050:
可测量X、Y、Z轴三个方向的角速度
可编程设置角速度测量范围为±250、±500、±1000、±2000°/sec
可测量X、Y、Z轴三个方向的加速度
可编程设置加速度测量范围为±2g、±4g、±8g、±16g
可编程设置低功耗模式
可编程设置采样频率
... ..
MPU6050通信接口:
MPU6050可以使用IIC总线和其他器件进行数据交互,我们可以使用IIC总线向MPU6050中的控制寄存器写入数据来设置MPU6050的工作参数 也可以使用IIC总线从MPU6050中的数据寄存器读取数据来获取加速度、角速度等信息。

23.4MPU6050寄存器
向MPU6050的一个寄存器写一个字节的数据:
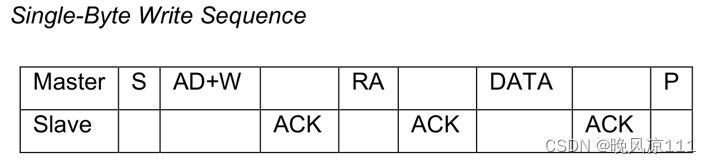
RA寄存器地址 ,ACK应答
1.主机(Exynos4412)发送起始信号
2.主机发送从机地址(MPU6050的地址)及读写方向(写)
3.从机(MPU6050)发送应答信号
4.主机发送一个字节数据(要写的寄存器的地址)
5.从机发送应答信号
6.主机发送一个字节数据(要写到寄存器的数据)
7.从机发送应答信号
8.主机发送停止信号
从MPU6050的一个寄存器读一个字节的数据:

1.主机(Exynos4412)发送起始信号
2.主机发送从机地址(MPU6050的地址)及读写方向(写)
3.从机(MPU6050)发送应答信号
4.主机发送一个字节数据(要写的寄存器的地址)
5.从机发送应答信号
6.主机(Exynos4412)发送起始信号
7.主机发送从机地址(MPU6050的地址)及读写方向(读)
8.从机(MPU6050)发送应答信号
9.从机发送一个字节数据(要读的寄存器中的数据)
10.主机发送非应答信号(不再接收更多的数据)
11.主机发送停止信号
作业
简述通过主机从MPU6050中的一个寄存器中读一个字节的数据的过程
如上















 90
90











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









