






Introduce
在Camera里,除了Image Buffer外,另外一个重要的角色就是Metadata了。
那Metadata是什么呢?当我们要获取到关于当前这个设备上一些Device的信息,此时就需要从Metadata中去获取;想要知道每一张图的相关资讯,比如曝光时间,也需要从metadata中获取。所以Metadata就是描述某个东西的一包数据,这个东西可以是一个Camera Device,也可以是Request阶段捕获到的一张图等等。
Metadata又可以分为Static\Controls\Dynamic metadata:
Static metadata
存储了相机的相关资讯,描述了camera device的规格以及对应的能力。
Controls metadata
可控制相机行为的metadata, 每个request都会带的控制信息,相当于告诉底层该如何理解这个Request。
Dynamic metadata
当HAL收到control metadata后,设定给ISP,然后产生的对应的结果。
Metadata的数据结构
前面说“Metadata就是描述某个东西的一包数据",那这包数据到底是长什么样子呢?也就是它的数据结构是长什么样子?我们经常会遇到:通过Metadata里的一个TAG去获取其对应的Value,或者通过一个TAG去设置其对应的Value。所以不难猜测Metadata里面其实差不多是采用了<Key, Value>这样子的架构来存放数据的。
Metadata在内存中的分布
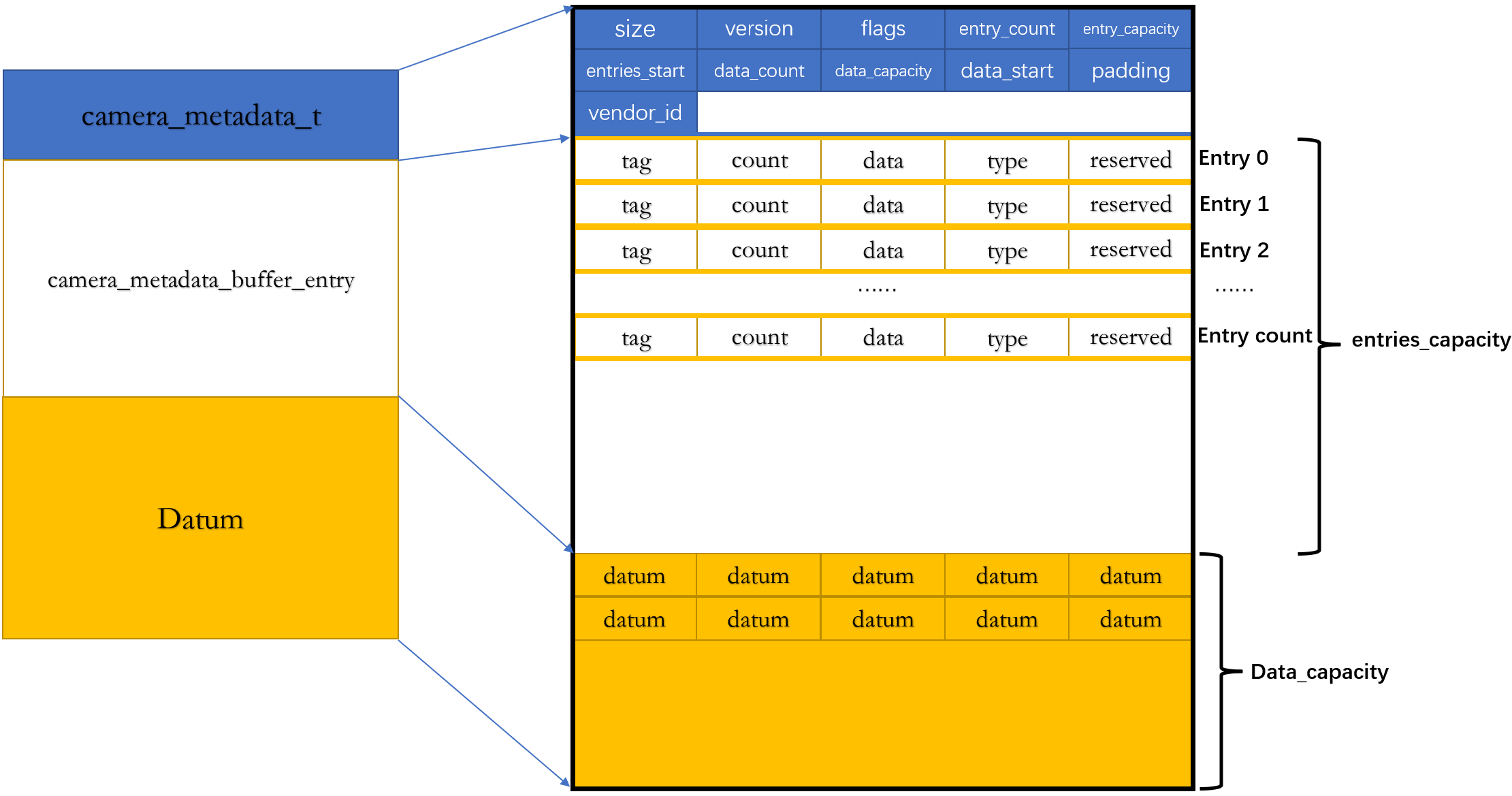
最直观的,先看一下Metadata它在内存中是什么样子的。关于Camera Meta的相关定义和操作是在system/media/camera 目录下。其中在system/media/camera/src/camera_metadata.c中,有描述了Camera Metadata的数据结构,看起来它其实是“几个Struct的组合体”.
/**
* A packet of metadata. This is a list of entries, each of which may point to
* its values stored at an offset in data.
*
* It is assumed by the utility functions that the memory layout of the packet
* is as follows:
*
* |-----------------------------------------------|
* | camera_metadata_t |
* | |
* |-----------------------------------------------|
* | reserved for future expansion |
* |-----------------------------------------------|
* | camera_metadata_buffer_entry_t #0 |
* |-----------------------------------------------|
* | .... |
* |-----------------------------------------------|
* | camera_metadata_buffer_entry_t #entry_count-1 |
* |-----------------------------------------------|
* | free space for |
* | (entry_capacity-entry_count) entries |
* |-----------------------------------------------|
* | start of camera_metadata.data |
* | |
* |-----------------------------------------------|
* | free space for |
* | (data_capacity-data_count) bytes |
* |-----------------------------------------------|
*
* With the total length of the whole packet being camera_metadata.size bytes.
*
* In short, the entries and data are contiguous in memory after the metadata
* header.
*/camera_metadata_t
它定义在system/media/camera/include/system/camera_metadata.h,但可以发现,其实camera_metadata_t就是system/media/camera/src/camera_metadata.c中的camera_metadata,它记录了这包metadata的一些基本信息。
typedef uint32_t metadata_uptrdiff_t;
typedef uint32_t metadata_size_t;
typedef uint64_t metadata_vendor_id_t;
#define METADATA_ALIGNMENT ((size_t) 4)
struct camera_metadata {
metadata_size_t size;
uint32_t version;
uint32_t flags;
metadata_size_t entry_count;
metadata_size_t entry_capacity;
metadata_uptrdiff_t entries_start; // Offset from camera_metadata
metadata_size_t data_count;
metadata_size_t data_capacity;
metadata_uptrdiff_t data_start; // Offset from camera_metadata
uint32_t padding; // padding to 8 bytes boundary
metadata_vendor_id_t vendor_id;
};
typedef struct camera_metadata camera_metadata_t;size:这包metadata所占的总的字节数
flags: 标记当前是否有对entry进行排序
entry_count: 当前Entry的数量,初始值为0
entry_capacity: 当前这包metadata能存放的最大Entry数量
entries_start: entry相对于camera_metadata_t起始地址的偏移量,即从camera_metadata_t的起始地址再偏移entries_start就到了开始存储Entry的位置了
data_count: 当前data的数量,初始值为0
data_capacity: 这包metadata能存储data的数量
data_start: data相对于camera_metadata_t起始地址的偏移量,即从camera_metadata_t的起始地址再偏移data_start就到了开始存储data的位置了
vendor_id:跟当前这个手机上的CameraDeviceProvider相关,每个CameraDeviceProvider都有自己对应的vendor_id
camera_metadata_buffer_entry
前面说”Metadata里应该是采用了<Key,Value>的结构“, 这里的camera_metadata_buffer_entry是就存储了Key(Metadata里其实就是TAG)和Value之间的关系。里面的每一个成员的含义都有说明,
这个struct里的data段,它里面存放的是这个TAG相关的数据信息,如果数据小于32bit,则直接存放到value里,不用再通过offset再跳转一次去访问数据了,因为offset本身也是需要uint32的空间的
/**
* A single metadata entry, storing an array of values of a given type. If the
* array is no larger than 4 bytes in size, it is stored in the data.value[]
* array; otherwise, it can found in the parent's data array at index
* data.offset.
*/
#define ENTRY_ALIGNMENT ((size_t) 4)
typedef struct camera_metadata_buffer_entry {
uint32_t tag; // tag的key值
uint32_t count; // tag的value对应的data的数量
union {
uint32_t offset; // offset标记当前的key值对应的value在data_start中的位
uint8_t value[4]; // 当value占用的字节数<=4时,直接存储到这里(省空间
} data;
uint8_t type; // TYPE_BYTE、TYPE_INT32、TYPE_FLOAT、TYPE_INT64
uint8_t reserved[3];
} camera_metadata_buffer_entry_t;camera_metadata_data
camera_metadata_data是前面camera_metadata_buffer_entry里offset所指向的value,因为数据类型不止一种,比如:有的TAG对应的数据是float类型,有的TAG对应的数据是int类型的, 所以camera metadata采用的是“共用体”这种数据类型来存储data。
/**
* A datum of metadata. This corresponds to camera_metadata_entry_t::data
* with the difference that each element is not a pointer. We need to have a
* non-pointer type description in order to figure out the largest alignment
* requirement for data (DATA_ALIGNMENT).
*/
#define DATA_ALIGNMENT ((size_t) 8)
typedef union camera_metadata_data {
uint8_t u8;
int32_t i32;
float f;
int64_t i64;
double d;
camera_metadata_rational_t r;
} camera_metadata_data_t;Camera metadata内存分布图
通过过前面的描述后,Camera metadata在内存分布图中的样子,可以简单地用下面这幅图来进行描述:
关于Tag和Value
TAG
Tag即前面所说的camera_metadata_buffer_entry,对于每一个TAG来说,其中的变量uint32_t tag是这个TAG的Key值,也是区别于其他TAG的标识,它肯定是唯一的,那它是在哪里定义呢?这个tag其实是通过enum的方式定义的。
system/media/camera/include/system/camera_metadata_tags.h里枚举了AOSP里的TAG,它是按这样的步骤得到某个TAG的key值的:
先枚举Metadata section。因为总体上TAG可以按用途和模块儿进行分组,每一组就叫一个Section,比如Control meta, Sensor的meta、flash相关的meta等等。
为每一个section分配一个取值区间,在这区间内枚举出属于这个Section的所有TAG。
按照上面这样的方式就可以枚举完AOSP所有的tag
1.1枚举Metadata Section
Metadata的section定义如下,AOSP枚举了很多Section,像Control、Statistics、Sensor、flash这些。
注意看,最后还有一个VENDOR_SECTION,它的枚举值为0x8000,它的存在是因为除了Android自己定义的TAG外,还有平台厂商和OEM厂商自己定义的有其他用途的TAG,比如QualComm、MTK、Samsung和各个手机设备制造商等等。
/**
* Top level hierarchy definitions for camera metadata. *_INFO sections are for
* the static metadata that can be retrived without opening the camera device.
* New sections must be added right before ANDROID_SECTION_COUNT to maintain
* existing enumerations.
*/
typedef enum camera_metadata_section {
ANDROID_COLOR_CORRECTION,
ANDROID_CONTROL,
ANDROID_DEMOSAIC,
ANDROID_EDGE,
ANDROID_FLASH,
ANDROID_FLASH_INFO,
ANDROID_HOT_PIXEL,
ANDROID_JPEG,
ANDROID_LENS,
ANDROID_LENS_INFO,
ANDROID_NOISE_REDUCTION,
ANDROID_QUIRKS,
ANDROID_REQUEST,
ANDROID_SCALER,
ANDROID_SENSOR,
ANDROID_SENSOR_INFO,
ANDROID_SHADING,
ANDROID_STATISTICS,
ANDROID_STATISTICS_INFO,
ANDROID_TONEMAP,
ANDROID_LED,
ANDROID_INFO,
ANDROID_BLACK_LEVEL,
ANDROID_SYNC,
ANDROID_REPROCESS,
ANDROID_DEPTH,
ANDROID_LOGICAL_MULTI_CAMERA,
ANDROID_DISTORTION_CORRECTION,
ANDROID_HEIC,
ANDROID_HEIC_INFO,
ANDROID_AUTOMOTIVE,
ANDROID_AUTOMOTIVE_LENS,
ANDROID_SECTION_COUNT,
VENDOR_SECTION = 0x8000
} camera_metadata_section_t;
1.2枚举TAG
为每一个Section分配一个取值区间,就是将Section的enum值左移16 bit就是这个Section的start,以#Section_start来标记。
* Hierarchy positions in enum space. All vendor extension tags must be
* defined with tag >= VENDOR_SECTION_START
*/
typedef enum camera_metadata_section_start {
ANDROID_COLOR_CORRECTION_START = ANDROID_COLOR_CORRECTION << 16,
ANDROID_CONTROL_START = ANDROID_CONTROL << 16,
ANDROID_DEMOSAIC_START = ANDROID_DEMOSAIC << 16,
ANDROID_EDGE_START = ANDROID_EDGE << 16,
ANDROID_FLASH_START = ANDROID_FLASH << 16,
ANDROID_FLASH_INFO_START = ANDROID_FLASH_INFO << 16,
ANDROID_HOT_PIXEL_START = ANDROID_HOT_PIXEL << 16,
ANDROID_JPEG_START = ANDROID_JPEG << 16,
ANDROID_LENS_START = ANDROID_LENS << 16,
ANDROID_LENS_INFO_START = ANDROID_LENS_INFO << 16,
ANDROID_NOISE_REDUCTION_START = ANDROID_NOISE_REDUCTION << 16,
ANDROID_QUIRKS_START = ANDROID_QUIRKS << 16,
ANDROID_REQUEST_START = ANDROID_REQUEST << 16,
ANDROID_SCALER_START = ANDROID_SCALER << 16,
ANDROID_SENSOR_START = ANDROID_SENSOR << 16,
ANDROID_SENSOR_INFO_START = ANDROID_SENSOR_INFO << 16,
ANDROID_SHADING_START = ANDROID_SHADING << 16,
ANDROID_STATISTICS_START = ANDROID_STATISTICS << 16,
ANDROID_STATISTICS_INFO_START = ANDROID_STATISTICS_INFO << 16,
ANDROID_TONEMAP_START = ANDROID_TONEMAP << 16,
ANDROID_LED_START = ANDROID_LED << 16,
ANDROID_INFO_START = ANDROID_INFO << 16,
ANDROID_BLACK_LEVEL_START = ANDROID_BLACK_LEVEL << 16,
ANDROID_SYNC_START = ANDROID_SYNC << 16,
ANDROID_REPROCESS_START = ANDROID_REPROCESS << 16,
ANDROID_DEPTH_START = ANDROID_DEPTH << 16,
ANDROID_LOGICAL_MULTI_CAMERA_START
= ANDROID_LOGICAL_MULTI_CAMERA
<< 16,
ANDROID_DISTORTION_CORRECTION_START
= ANDROID_DISTORTION_CORRECTION
<< 16,
ANDROID_HEIC_START = ANDROID_HEIC << 16,
ANDROID_HEIC_INFO_START = ANDROID_HEIC_INFO << 16,
ANDROID_AUTOMOTIVE_START = ANDROID_AUTOMOTIVE << 16,
ANDROID_AUTOMOTIVE_LENS_START = ANDROID_AUTOMOTIVE_LENS << 16,
VENDOR_SECTION_START = VENDOR_SECTION << 16
} camera_metadata_section_start_t;从这个section的start开始,开始枚举其下有哪些tag,枚举完后,再以一个#Section_END来标志这个section的TAG已经枚举完毕。
/**
* Main enum for defining camera metadata tags. New entries must always go
* before the section _END tag to preserve existing enumeration values. In
* addition, the name and type of the tag needs to be added to
* system/media/camera/src/camera_metadata_tag_info.c
*/
typedef enum camera_metadata_tag {
ANDROID_COLOR_CORRECTION_MODE = // enum | public | HIDL v3.2
ANDROID_COLOR_CORRECTION_START,
ANDROID_COLOR_CORRECTION_TRANSFORM, // rational[] | public | HIDL v3.2
ANDROID_COLOR_CORRECTION_GAINS, // float[] | public | HIDL v3.2
ANDROID_COLOR_CORRECTION_ABERRATION_MODE, // enum | public | HIDL v3.2
ANDROID_COLOR_CORRECTION_AVAILABLE_ABERRATION_MODES,
// byte[] | public | HIDL v3.2
ANDROID_COLOR_CORRECTION_END,
..............
ANDROID_STATISTICS_FACE_DETECT_MODE = // enum | public | HIDL v3.2
ANDROID_STATISTICS_START,
ANDROID_STATISTICS_HISTOGRAM_MODE, // enum | system | HIDL v3.2
ANDROID_STATISTICS_SHARPNESS_MAP_MODE, // enum | system | HIDL v3.2
ANDROID_STATISTICS_HOT_PIXEL_MAP_MODE, // enum | public | HIDL v3.2
ANDROID_STATISTICS_FACE_IDS, // int32[] | ndk_public | HIDL v3.2
ANDROID_STATISTICS_FACE_LANDMARKS, // int32[] | ndk_public | HIDL v3.2
ANDROID_STATISTICS_FACE_RECTANGLES, // int32[] | ndk_public | HIDL v3.2
ANDROID_STATISTICS_FACE_SCORES, // byte[] | ndk_public | HIDL v3.2
ANDROID_STATISTICS_HISTOGRAM, // int32[] | system | HIDL v3.2
ANDROID_STATISTICS_SHARPNESS_MAP, // int32[] | system | HIDL v3.2
ANDROID_STATISTICS_LENS_SHADING_CORRECTION_MAP, // byte | java_pub
ANDROID_STATISTICS_LENS_SHADING_MAP, // float[] | ndk_public | HIDL v3.2
ANDROID_STATISTICS_PREDICTED_COLOR_GAINS, // float[] | hidden | HIDL v3.2
ANDROID_STATISTICS_PREDICTED_COLOR_TRANSFORM, // rational[] | hidden | HIDL v3.2
ANDROID_STATISTICS_SCENE_FLICKER, // enum | public | HIDL v3.2
ANDROID_STATISTICS_HOT_PIXEL_MAP, // int32[] | public | HIDL v3.2
ANDROID_STATISTICS_LENS_SHADING_MAP_MODE, // enum | public | HIDL v3.2
ANDROID_STATISTICS_OIS_DATA_MODE, // enum | public | HIDL v3.3
ANDROID_STATISTICS_OIS_TIMESTAMPS, // int64[] | ndk_public | HIDL v3.3
ANDROID_STATISTICS_OIS_X_SHIFTS, // float[] | ndk_public | HIDL v3.3
ANDROID_STATISTICS_OIS_Y_SHIFTS, // float[] | ndk_public | HIDL v3.3
ANDROID_STATISTICS_END,
....................
}总结起来,一个TAG的Key值可以这样子来看待 (uint32_t类型的变量是4Byte, 32 bits ):

所以通过前四位可以知道这个TAG是属于哪个section,再根据后四位可以知道它是这个Section下的哪个tag。
比如ANDROID_STATISTICS这个Section的所有TAG,就处于ANDROID_STATISTICS_START(0x00110000)和ANDROID_STATISTICS_END(0x00110015)这个区间. 其中描述人脸框ANDROID_STATISTICS_FACE_RECTANGLES这个TAG,就属于这个Section之间,其key为:0x00110006;而反过来,如果发现一个TAG的key为0x00110006,那从0x0011可以判断出它是属于ANDROID_STATISTICS这个Section,再根据后16 bits, 即0006,从start开始往下数0x0006个数,就能知道是ANDROID_STATISTICS_FACE_RECTANGLES了。
另外,如果看到某个Tag的Key是0x8000开头的,则可以判断出这肯定是一个Vendor Tag。
Value
介绍了TAG,那TAG所对应的Value是什么类型是怎么定义的,以及在哪里定义的呢。以前面说的人脸框ANDROID_STATISTICS_FACE_RECTANGLES来说,它所对应的数据类型是什么样的呢,是在哪里被定义的呢?
这个是在system/media/camera/src/camera_metadata_tag_info.c下面定义的每个TAG所对应的数据类型。先看一个简短的struct,这个名叫tag_info的struct里描述了这个tag的名字以及tag的type,即数据类型.
/** Tag information */
typedef struct tag_info {
const char *tag_name;
uint8_t tag_type;
} tag_info_t;为每一个section定义一个长度为 End - Start 大小的tag_info类型数组,这个数组下面就定义了这个section旗下的所有tag的名字,以及对应的数据类型。
以android_statistics这个Section下的Tag为例子:定义了一个tag_info类型的数组,其长度为
ANDROID_STATISTICS_END - ANDROID_STATISTICS_START;数组里面按照和camera_metadata_tag的顺序,为每一个tag定义了名字和数据类型;还是以人脸框这个tag为例子,可以看到它的名字为:"faceRectangles", 数据类型为“TYPE_INT32 ”
static tag_info_t android_statistics[ANDROID_STATISTICS_END -
ANDROID_STATISTICS_START] = {
[ ANDROID_STATISTICS_FACE_DETECT_MODE - ANDROID_STATISTICS_START ] =
{ "faceDetectMode", TYPE_BYTE },
[ ANDROID_STATISTICS_HISTOGRAM_MODE - ANDROID_STATISTICS_START ] =
{ "histogramMode", TYPE_BYTE },
[ ANDROID_STATISTICS_SHARPNESS_MAP_MODE - ANDROID_STATISTICS_START ] =
{ "sharpnessMapMode", TYPE_BYTE },
[ ANDROID_STATISTICS_HOT_PIXEL_MAP_MODE - ANDROID_STATISTICS_START ] =
{ "hotPixelMapMode", TYPE_BYTE },
[ ANDROID_STATISTICS_FACE_IDS - ANDROID_STATISTICS_START ] =
{ "faceIds", TYPE_INT32 },
[ ANDROID_STATISTICS_FACE_LANDMARKS - ANDROID_STATISTICS_START ] =
{ "faceLandmarks", TYPE_INT32 },
[ ANDROID_STATISTICS_FACE_RECTANGLES - ANDROID_STATISTICS_START ] =
{ "faceRectangles", TYPE_INT32 },
[ ANDROID_STATISTICS_FACE_SCORES - ANDROID_STATISTICS_START ] =
{ "faceScores", TYPE_BYTE },
[ ANDROID_STATISTICS_HISTOGRAM - ANDROID_STATISTICS_START ] =
{ "histogram", TYPE_INT32 },
[ ANDROID_STATISTICS_SHARPNESS_MAP - ANDROID_STATISTICS_START ] =
{ "sharpnessMap", TYPE_INT32 },
[ ANDROID_STATISTICS_LENS_SHADING_CORRECTION_MAP - ANDROID_STATISTICS_START ] =
{ "lensShadingCorrectionMap", TYPE_BYTE },
[ ANDROID_STATISTICS_LENS_SHADING_MAP - ANDROID_STATISTICS_START ] =
{ "lensShadingMap", TYPE_FLOAT },
[ ANDROID_STATISTICS_PREDICTED_COLOR_GAINS - ANDROID_STATISTICS_START ] =
{ "predictedColorGains", TYPE_FLOAT },
[ ANDROID_STATISTICS_PREDICTED_COLOR_TRANSFORM - ANDROID_STATISTICS_START ] =
{ "predictedColorTransform", TYPE_RATIONAL
},
[ ANDROID_STATISTICS_SCENE_FLICKER - ANDROID_STATISTICS_START ] =
{ "sceneFlicker", TYPE_BYTE },
[ ANDROID_STATISTICS_HOT_PIXEL_MAP - ANDROID_STATISTICS_START ] =
{ "hotPixelMap", TYPE_INT32 },
[ ANDROID_STATISTICS_LENS_SHADING_MAP_MODE - ANDROID_STATISTICS_START ] =
{ "lensShadingMapMode", TYPE_BYTE },
[ ANDROID_STATISTICS_OIS_DATA_MODE - ANDROID_STATISTICS_START ] =
{ "oisDataMode", TYPE_BYTE },
[ ANDROID_STATISTICS_OIS_TIMESTAMPS - ANDROID_STATISTICS_START ] =
{ "oisTimestamps", TYPE_INT64 },
[ ANDROID_STATISTICS_OIS_X_SHIFTS - ANDROID_STATISTICS_START ] =
{ "oisXShifts", TYPE_FLOAT },
[ ANDROID_STATISTICS_OIS_Y_SHIFTS - ANDROID_STATISTICS_START ] =
{ "oisYShifts", TYPE_FLOAT },
};TAG Name
最后,再说一个关于Tag name的事情,前面我们知道每一个TAG都有一个自己专属的Key,也就是说通过Key可以唯一地区分出一个TAG,但是为了方便使用,Android 中还给每一个 tag 又定义了 一个char* 类型的名字,在使用时,也可以直接通过这个char*类型名字来操作 tag。
system/media/camera/docs/docs.html 中详细列举了所有 Android 原生 Camera Tag对应的name,它是属于Controls、Static还是Dynamic类型的,以及对应的用途都有详细的描述。
还是以人脸框为例子,ANDROID_STATISTICS_FACE_RECTANGLES对应的name叫做:android.statistics.faceRectangles。
camera metadata相关API
在system/media/camera/src/camera_metadata.c里实作了对camera metadata的操作方法,包括创建和销毁metadata以及metadata的增删改查,这里面的函数众多,就不一一单独列出来分析。
我们就以创建一包metadata为例子,来看一下创建一包metadata的过程。 在构造metadata时,调用allocate_camera_metadata,传入entry_capacity和data_capacity;先根据entry_capacity和data_capacity确定这包metadata需要占多少内存;分配好内存后,然后对metadata进行初始化。
allocate_camera_metadata()
可以看到,传入了entry_capacity和data_capacity,会先根据这两个值调用calculate_camera_metadata_size()这个函数,从名字可以看出来,这个函数是在计算这包metadata要占据多大的内存空间
计算出要多大的内存后,调用calloc()去分配内存空间
分配好内存空间后,调用place_camera_metadata()对metadata进行初始化
camera_metadata_t *allocate_camera_metadata(size_t entry_capacity,
size_t data_capacity) {
size_t memory_needed = calculate_camera_metadata_size(entry_capacity,
data_capacity);
void *buffer = calloc(1, memory_needed);
camera_metadata_t *metadata = place_camera_metadata(
buffer, memory_needed, entry_capacity, data_capacity);
if (!metadata) {
/* This should not happen when memory_needed is the same
* calculated in this function and in place_camera_metadata.
*/
free(buffer);
}
return metadata;
}calculate_camera_metadata_size()
计算内存空间大小,下面是这个函数的实现,可以看出,它其实就是根据Metadata head、entry_capacity、data_capaticy以及各自的对齐来计算的这包metadata所占据的空间大小的
size_t calculate_camera_metadata_size(size_t entry_count,
size_t data_count) {
size_t memory_needed = sizeof(camera_metadata_t);
// Start entry list at aligned boundary
memory_needed = ALIGN_TO(memory_needed, ENTRY_ALIGNMENT);
memory_needed += sizeof(camera_metadata_buffer_entry_t[entry_count]);
// Start buffer list at aligned boundary
memory_needed = ALIGN_TO(memory_needed, DATA_ALIGNMENT);
memory_needed += sizeof(uint8_t[data_count]);
// Make sure camera metadata can be stacked in continuous memory
memory_needed = ALIGN_TO(memory_needed, METADATA_PACKET_ALIGNMENT);
return memory_needed;
}place_camera_metadata()
calloc()里根据calculate_camera_metadata_size()计算出来的size去分配好内存空间后,接下来需要调用place_camera_metadata()对这块内存进行初始化,下面就是这个函数的实现,可以看出,首先是进行一些异常判断,没有问题后,就对前面说的camera_metadata_t里的成员进行初始化,size、flags、version、entry_count、entry_capacity、entries_start、data_count、data_capacity、data_start、vendor_id。
camera_metadata_t *place_camera_metadata(void *dst,
size_t dst_size,
size_t entry_capacity,
size_t data_capacity) {
if (dst == NULL) return NULL;
size_t memory_needed = calculate_camera_metadata_size(entry_capacity,
data_capacity);
if (memory_needed > dst_size) {
ALOGE("%s: Memory needed to place camera metadata (%zu) > dst size (%zu)", __FUNCTION__,
memory_needed, dst_size);
return NULL;
}
camera_metadata_t *metadata = (camera_metadata_t*)dst;
metadata->version = CURRENT_METADATA_VERSION;
metadata->flags = 0;
metadata->entry_count = 0;
metadata->entry_capacity = entry_capacity;
metadata->entries_start =
ALIGN_TO(sizeof(camera_metadata_t), ENTRY_ALIGNMENT);
metadata->data_count = 0;
metadata->data_capacity = data_capacity;
metadata->size = memory_needed;
size_t data_unaligned = (uint8_t*)(get_entries(metadata) +
metadata->entry_capacity) - (uint8_t*)metadata;
metadata->data_start = ALIGN_TO(data_unaligned, DATA_ALIGNMENT);
metadata->vendor_id = CAMERA_METADATA_INVALID_VENDOR_ID;
assert(validate_camera_metadata_structure(metadata, NULL) == OK);
return metadata;
}
void free_camera_metadata(camera_metadata_t *metadata) {
free(metadata);
}这里要说明一下的是,关于Vnedor Tag的操作,因为FrameWork是无法事先知道各个厂商底层到底定义了那些TAG,以及这些TAG的名字、key和类型的,更无法知道它们的用途。所以就定义了一个 vendor_tag_ops和vendor_tag_cache_ops,用户可以自已定义 metadata 以及实现对应的操作方法 。
/**
* This structure contains basic functions for enumerating an immutable set of
* vendor-defined camera metadata tags, and querying static information about
* their structure/type. The intended use of this information is to validate
* the structure of metadata returned by the camera HAL, and to allow vendor-
* defined metadata tags to be visible in application facing camera API.
*/
typedef struct vendor_tag_ops vendor_tag_ops_t;
struct vendor_tag_ops {
/**
* Get the number of vendor tags supported on this platform. Used to
* calculate the size of buffer needed for holding the array of all tags
* returned by get_all_tags(). This must return -1 on error.
*/
int (*get_tag_count)(const vendor_tag_ops_t *v);
/**
* Fill an array with all of the supported vendor tags on this platform.
* get_tag_count() must return the number of tags supported, and
* tag_array will be allocated with enough space to hold the number of tags
* returned by get_tag_count().
*/
void (*get_all_tags)(const vendor_tag_ops_t *v, uint32_t *tag_array);
/**
* Get the vendor section name for a vendor-specified entry tag. This will
* only be called for vendor-defined tags.
*
* The naming convention for the vendor-specific section names should
* follow a style similar to the Java package style. For example,
* CameraZoom Inc. must prefix their sections with "com.camerazoom."
* This must return NULL if the tag is outside the bounds of
* vendor-defined sections.
*
* There may be different vendor-defined tag sections, for example the
* phone maker, the chipset maker, and the camera module maker may each
* have their own "com.vendor."-prefixed section.
*
* The memory pointed to by the return value must remain valid for the
* lifetime of the module, and is owned by the module.
*/
const char *(*get_section_name)(const vendor_tag_ops_t *v, uint32_t tag);
/**
* Get the tag name for a vendor-specified entry tag. This is only called
* for vendor-defined tags, and must return NULL if it is not a
* vendor-defined tag.
*
* The memory pointed to by the return value must remain valid for the
* lifetime of the module, and is owned by the module.
*/
const char *(*get_tag_name)(const vendor_tag_ops_t *v, uint32_t tag);
/**
* Get tag type for a vendor-specified entry tag. The type returned must be
* a valid type defined in camera_metadata.h. This method is only called
* for tags >= CAMERA_METADATA_VENDOR_TAG_BOUNDARY, and must return
* -1 if the tag is outside the bounds of the vendor-defined sections.
*/
int (*get_tag_type)(const vendor_tag_ops_t *v, uint32_t tag);
/* Reserved for future use. These must be initialized to NULL. */
void* reserved[8];
};
struct vendor_tag_cache_ops {
/**
* Get the number of vendor tags supported on this platform. Used to
* calculate the size of buffer needed for holding the array of all tags
* returned by get_all_tags(). This must return -1 on error.
*/
int (*get_tag_count)(metadata_vendor_id_t id);
/**
* Fill an array with all of the supported vendor tags on this platform.
* get_tag_count() must return the number of tags supported, and
* tag_array will be allocated with enough space to hold the number of tags
* returned by get_tag_count().
*/
void (*get_all_tags)(uint32_t *tag_array, metadata_vendor_id_t id);
/**
* Get the vendor section name for a vendor-specified entry tag. This will
* only be called for vendor-defined tags.
*
* The naming convention for the vendor-specific section names should
* follow a style similar to the Java package style. For example,
* CameraZoom Inc. must prefix their sections with "com.camerazoom."
* This must return NULL if the tag is outside the bounds of
* vendor-defined sections.
*
* There may be different vendor-defined tag sections, for example the
* phone maker, the chipset maker, and the camera module maker may each
* have their own "com.vendor."-prefixed section.
*
* The memory pointed to by the return value must remain valid for the
* lifetime of the module, and is owned by the module.
*/
const char *(*get_section_name)(uint32_t tag, metadata_vendor_id_t id);
/**
* Get the tag name for a vendor-specified entry tag. This is only called
* for vendor-defined tags, and must return NULL if it is not a
* vendor-defined tag.
*
* The memory pointed to by the return value must remain valid for the
* lifetime of the module, and is owned by the module.
*/
const char *(*get_tag_name)(uint32_t tag, metadata_vendor_id_t id);
/**
* Get tag type for a vendor-specified entry tag. The type returned must be
* a valid type defined in camera_metadata.h. This method is only called
* for tags >= CAMERA_METADATA_VENDOR_TAG_BOUNDARY, and must return
* -1 if the tag is outside the bounds of the vendor-defined sections.
*/
int (*get_tag_type)(uint32_t tag, metadata_vendor_id_t id);
/* Reserved for future use. These must be initialized to NULL. */
void* reserved[8];
};在Android Camera之CameraServer的启动过程里,其中一张流程图里有轻描淡写的提到:CameraService在enumProvider()里会调用CameraProviderManager::setUpVendorTags(), 这里面其实就是通过调用 set_camera_metadata_vendor_cache_ops() 方法将frameworks/av/camera/vendorTagDescriptor.cpp里所实作的vendor_cache_ops传给system/media/camera/src/camera_metadata.c里的全局变量vendor_cache_ops。这里可能看起来有疑问:为什么是FrameWork层实作的这个vendor_tag_cache_ops里的那些function,难道不是应该由Vendor来实做吗? 其实这里再继续往下追一下可以看到,Framework层vendorTagDescriptor.cpp里实作的那些fuction其实是还要根据vendor_id再转接一次到对应CameraDeviceProvider的vendorTagDescriptor里对应的function的。
在system/media/camera/src/camera_metadata.c这里面的相关的API中,如果发现操作的TAG是一个VendorTag时,就会跳到Vendor自己实作的方法里。比如通过一个TAG的key,去找它的Section name、Tag name、Tag type时,如果发现是AOSP里原生的,那就直接从对应的结构体里查找就好了;如果发现是Vendor Tag,就会根据这包meta的vendor_id调用到对应CameraDeviceProvider里的vendor_tag_cache_ops里Vendor所实作的方法里去得到相应的结果。















 1295
1295











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









