






核磁共振数据图像的坐标系统——从世界坐标系到图像坐标系的理解与转换,从矩阵坐标转换至MNI坐标
博客地址:blog.csdn.net/xj4math/
总结在 MRI 脑成像中关于坐标系统的一些概念。这些内容是从不同的地方收集来的,个人理解不一定正 确,谨慎参考。
一、三种坐标系统
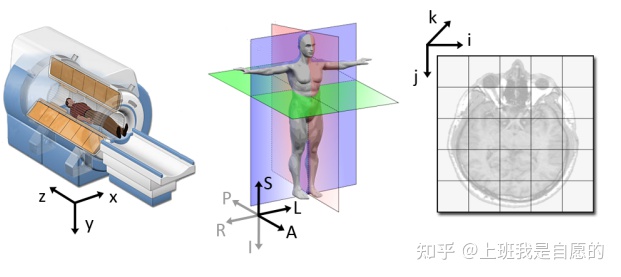
如下图所示,在 MRI 脑成像中我们大概会遇到三种坐标系统,左侧的是世界坐标系统 (world),表示的是在磁共振中的物理位置,三个坐标轴可以用 X, Y, Z 表示;中间的是解剖坐标系统 (anatomical),以人脑的方位(前后 Anterior/Posterior、上下 Superior/Inferior、左右 Left/Right) 作为坐标轴;右侧的是图像坐标系统(image),表示的是体素的采集和存储顺序,可以用 i, j, k 表示。 可以看到解剖坐标系统是特异于人体的,比如扫描一个球体,则没有所谓的前后上下。解剖坐标系统可 以用于描述世界坐标系统,比如用左右方向来对应 X 轴,也可以用于描述图像坐标系统,比如用左右方 向来对应 i 轴。另一方面,世界坐标系统和图像坐标系统的坐标轴并不一定和解剖坐标系统有直接对应关 系。在 FSL 里,世界坐标和图像坐标都用 X, Y, Z 来表示。NIFTI 文件的世界坐标系统是(尽可能接 近)RAS 坐标系统,即 X 轴从左到右(R),Y 轴从后向前(A),Z 轴从下往上(S)。
二、不同坐标系统的相互转换
世界坐标系统和图像坐标系统可以通过一个 4*4 的线性变换矩阵进行相互转换,在 NIFTI 文件头信息中, qform/sform 存放着这个矩阵。qform 和 sform 的区别是,理论上 qform 用于磁共振扫描仪(scanner space)世界坐标和图像坐标的相互转换,而 sform 用于标准空间(standard space)世界坐标和图像坐 标的相互转换,但在实际应用中并没有严格遵循这种区分。在 FreeSurfer 的 mgh 文件中,vox2ras 存放 着这个矩阵。
三、标准空间和标准模板
目前常用的标准空间和模板是 MNI 空间和 MNI 模板,MNI 空间只是定义了坐标系统,而在 MNI 空间 中有不同的 MNI 模板。常用的 MNI 模板有 MNI305,Colin27 和 MNI152,MNI152 又分为 linear 和 non-linear 的版本。虽然这些模板都位于 MNI 空间,但在解剖位置上差异不小。
从矩阵坐标转换至MNI坐标
假设矩阵坐标:X=3,Y = 5, Z = 6;
方法一:mx = 90-3*(X-1); my = 3*(Y-1)-126; mz = 3*(Z-1) - 72;
方法二:coor = Header.mat * [3,5,6,1]' ; (PS: 此处Header是通过rest_ReadNiftImage函数读取.nii格式文件得到的头文件,在坐标后面补一个 1,形成 4*1的向量)
DCM图像的坐标系的相关理解(世界坐标->图像坐标)
dcm的坐标系原点是在左上角;
像素间的距离是mm为单位的,这是像素的物理间距;有些CT得到的图像的间距并不是1,1,1,可能是小数。
问题:这种情况下,会遇到一些奇怪的现象:例如如果涉及在VTK窗口通过鼠标点击转化为3维世界坐标点时,需要特别关注,可能会出现明明在该点的3维体素有值,结果却不是你预期的结果,因为你得到的世界坐标系的点的间距是默认为1,1,1的,而真实图像不是这样的。
那么如何转化?
解决方法:在将世界坐标转换为图像坐标时,会涉及到两个参数, origin和spacing:
将需要转换的世界坐标减去origin,再除以spacing就是对应的图像坐标。
详细说一下origin和spacing:
origin表示图像坐标系原点在世界坐标系中的位置单位mm,spacing表示每个像素的实际距离间隔,单位也是mm;所以结节中心坐标减去origin再除以spacing,就是对应像素在图像坐标系中的位置.
总结一下:Orientation表示的是图像坐标系与解剖学坐标体系的关系。origin和spacing这两个参数将世界坐标转换为相应的图像坐标,即求出结节中心在图像中的位置。
这个是关于DCM的医学坐标系的说明。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









