







1. 概述
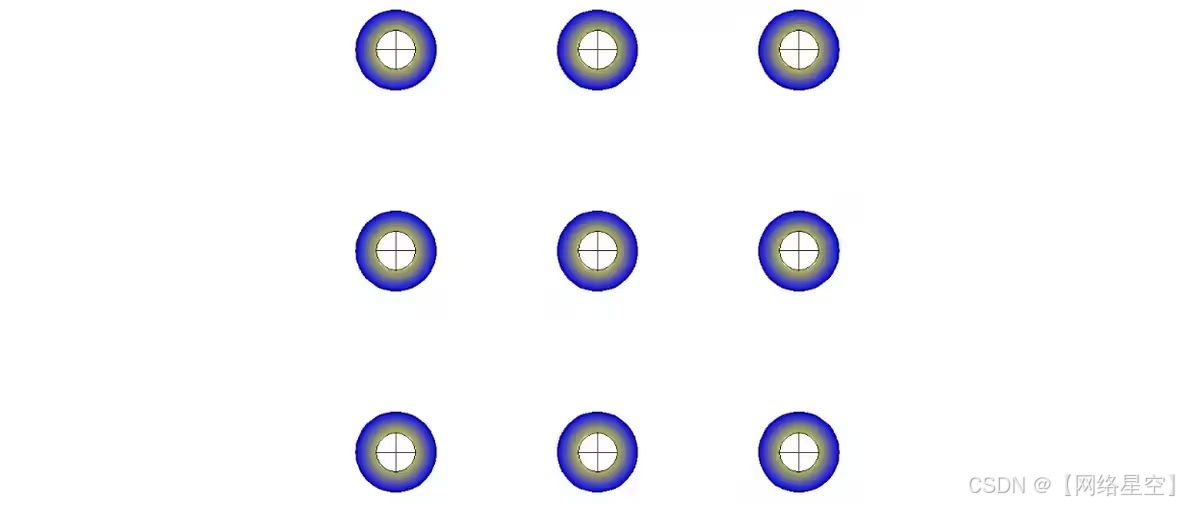
九点标定是手眼标定的其中一种简易的实现方式,它通过使用已知的且在世界坐标系位置已知的九个点来计算图像坐标与机械坐标的转换矩阵。
适用于三轴+旋转轴非标系统、SCARA机器人、六轴机器人(在运行过程中保证Rx&Ry不动即可)。
1.1 九点标定实质
九点标定是通过9组坐标点(图像坐标点和机械坐标点)计算图像坐标与机械坐标的转换矩阵的手眼标定方式。其本质是图像坐标和机械坐标的二维仿射变换,所以在应用过程中需要保证相机平面和目标平面相对平行。
对于二维平面,从原理上讲只需要3组坐标点即可求出转换矩阵,增加点位组数是为了提高精度。
1.2 Eye In Hand 和 Eye To Hand
1)Eye In Hand:眼在手内,求解相机坐标系&机器人工具坐标系的关系。
2)Eye To Hand:眼在手外,求解相机坐标系&机器人基座坐标系的关系。
1.3 xy模型和xyu模型
1)xy模型(本章节讨论)
a. 机器人只需要xy轴(直线引导),不需要u轴旋转引导 >> 标定xy。
b. 机器人需要xy
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











