







 就是求一个函数的最小值问题。并且计算机不适合用解析解。我们可以从一个初始点出发,一步一步走到期望的最优点,这就要求求出每一步往哪里走,走多长,从而把这种优化问题分解成求方向和求步长两个问题,求步长的时候,可以认为函数只有步长一个自变量,所以又称为一维搜索。附上我写的如下一段代码:求方向可以选择4种算法之一,求步长则用的是不精确一维搜索方法一%主函数集成了4种算法,所用的初始点可由用户自定义,用于求...
就是求一个函数的最小值问题。并且计算机不适合用解析解。我们可以从一个初始点出发,一步一步走到期望的最优点,这就要求求出每一步往哪里走,走多长,从而把这种优化问题分解成求方向和求步长两个问题,求步长的时候,可以认为函数只有步长一个自变量,所以又称为一维搜索。附上我写的如下一段代码:求方向可以选择4种算法之一,求步长则用的是不精确一维搜索方法一%主函数集成了4种算法,所用的初始点可由用户自定义,用于求...
就是求一个函数的最小值问题。并且计算机不适合用解析解。
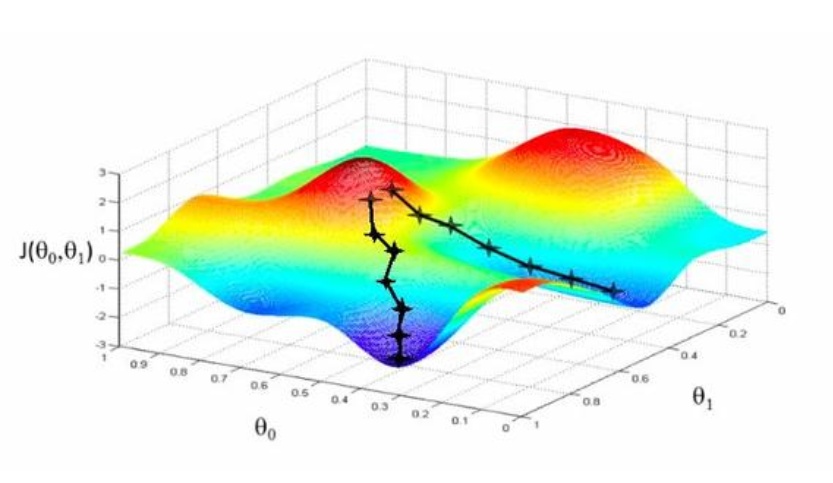
我们可以从一个初始点出发,一步一步走到期望的最优点,这就要求求出每一步往哪里走,走多长,从而把这种优化问题分解成求方向和求步长两个问题,求步长的时候,可以认为函数只有步长一个自变量,所以又称为一维搜索。
附上我写的如下一段代码:求方向可以选择4种算法之一,求步长则用的是不精确一维搜索方法一
%主函数集成了4种算法,所用的初始点可由用户自定义,用于求解无约束优化问题。
%目标函数定义在程序末尾的fun函数中,其梯度定义在gfun函数中,海塞矩阵(阻尼牛顿法需要)定义在d2fun函数中。
function Ti1
clear,clc;
x0=input('函数和梯度表达式在本程序末尾设置,现在请确定一个迭代初始点,以列向量表示:nx0='); %用户可自定迭代初始点,增强了算法的灵活性
disp('请输入数字选择一种算法:1-最速下降法;2-阻尼牛顿法;3-共轭梯度法;4或其他输入-BFGS算法');
choice=input('选择...'); %choice是特定的选择变量,能够决定程序执行哪个算法
kmax=10000; %最大迭代次数,避免算法无法收敛而一直进行
lambda=0; k=0; epsilon=1e-5; g=gfun(x0); %不同的方法在迭代前都需要的参数,其中lambda是迭代步长,epsilon是精度
switch choice
case 1
disp('选择了最速下降法'); %提示选择的算法,下同
case 2
disp('选择了阻尼牛顿法');
d2f=d2fun(x0); %阻尼牛顿法迭代前需要补充的参数,d2f即为海塞矩阵
case 3
disp('选择了共轭梯度法');
n=length(x0); s=zeros(n,1); mu=0; %共轭梯度法迭代前需要补充的参数,mu是确定下个搜索方向最关键的参数μ
otherwise
disp('选择了BFGS算法');
n=length(x0); H=eye(n); mu=0; g=gfun(x0); %BFGS算法迭代前需要补充的参数,H和mu分别为公式中的Hk和μk
end
while(k<kmax)
if(norm(g)<epsilon) %迭代停止准则
break;
end
switch choice %根据选择的算法确定搜索方向
case 1
s=-g; %最速下降法的搜索方向
case 2
s=-inv(d2f)*g; %阻尼牛顿法的搜索方向
case 3
s=-g+mu*s; %共轭梯度法的搜索方向
otherwise
s=-H*g; %BFGS算法的搜索方向
end
%求步长采用不精确一维搜索算法一,相比直接求解驻点方程和精确一维搜索更简单,运算也更迅速
c1=0.1;c2=0.5;a=0;b=inf;t=1;j=0;jmax=100; %一维搜索迭代参数设置
%其中t为存储步长的变量,最大步数jmax的设置是避免一维搜索无法跳出循环而一直占用计算资源
while(j<jmax)
if(fun(x0)-fun(x0+t*s)+c1*t*(gfun(x0))'*s>=0) %采用Wolfe-Powell准则
if((gfun(x0+t*s)-c2*gfun(x0))'*s>=0)
break;
else
j=j+1;a=t;t=min(2*t,(t+b)/2);
end
else
j=j+1;b=t;t=(t+a)/2;
end
end
%以上为不精确一维搜索算法一过程
lambda=t; %步长的确定
x=x0+lambda*s; %下一个迭代点的确定
%对最速下降法,已经可以进行下一步迭代,但对另外三种方法,需要更新参数
switch choice
case 1 %对最速下降法
x0=x; %更新迭代点的值,下同
g=gfun(x0); %求解新的梯度,下同
k=k+1; %进行下一次迭代,下同
case 2 %对阻尼牛顿法
x0=x;
g=gfun(x0);
k=k+1;
d2f=d2fun(x0); %阻尼牛顿法中海塞矩阵的更新
case 3 %对共轭梯度法
mu=norm(gfun(x))^2/(norm(g)^2); %共轭梯度法中μ的更新
x0=x;
g=gfun(x0);
k=k+1;
otherwise %对BFGS算法
dx=x-x0;dg=gfun(x)-g;
mu=1+(dg'*H*dg)/(dx'*dg); %BFGS算法中μ的更新
H=H+(mu*(dx*dx')-H*dg*dx'-dx*dg'*H)/(dx'*dg); %BFGS算法中H的更新
x0=x;
g=gfun(x0);
k=k+1;
end
end
if(k==kmax) %迭代超过最大次数仍未收敛,说明选择的算法收敛性不好
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1131
1131











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









