






 本文介绍了使用GUM法(JJF 1059.1-2012)评定测量不确定度的步骤,以螺旋测微器为例,详细阐述了B类评定方法,包括影响量分析、测量模型建立、不确定度分量合成及扩展不确定度确定,最终得出示值误差的测量结果和不确定度报告。
本文介绍了使用GUM法(JJF 1059.1-2012)评定测量不确定度的步骤,以螺旋测微器为例,详细阐述了B类评定方法,包括影响量分析、测量模型建立、不确定度分量合成及扩展不确定度确定,最终得出示值误差的测量结果和不确定度报告。


测量不确定度的评定方法应根据JJF 1059进行,该规范现分为两部分:JJF 1059.1-2012《测量不确定度评定与表示》,又称GUM评定方法或GUM法;JJF 1059.2-2012《用蒙特卡洛法评定测量不确定度》,又称MCM。
GUM法评定测量不确定度的步骤
(以游标卡尺校准为例)
1.找出所有影响测量结果的影响量
建立测量模型也称为测量模型化,其目的是要建立满足测量所有要求准确度的测量模型,即被测量Y和所有各影响量Xi之间的具体函数关系,其一般形式可写为:
Y=f(X1,X2,…,Xn)

2.建立满足测量不确定度评定所需的测量模型
在参考温度20℃下,卡尺的示值误差Ex可表示为:

3.确定各输入量的的估计值以及对应于各输入量估计值xi的标准测量不确定度u(xi)
4.确定对应于各输入量的不确定度分量ui(y)
标准不确定度的评定方法可以分为A类评定和B类评定。
A类评定:不确定度的A类评定是指通过对一组观测列进行统计分析,并以实验标准差表征其标准不确定度。
B类评定:用不同于测量不确定度A类评定的方法对测量不确定度分量进行的评定。
B类评定标准不确定度的信息来源:
(1)以前的观测数据;
(2)对有关技术资料和测量仪器特性的了解和经验;
(3)生产部门提供的技术说明文件;
(4)校准证书、检定证书或其它文件提供的数据,准确度的等级或级别,误差限等;
(5)手册或某些资料给出的参考数据及其不确定度;
(6)规定实验方法的国家标准或类似文件中给出的重复性限 r 或复现性限 R 。
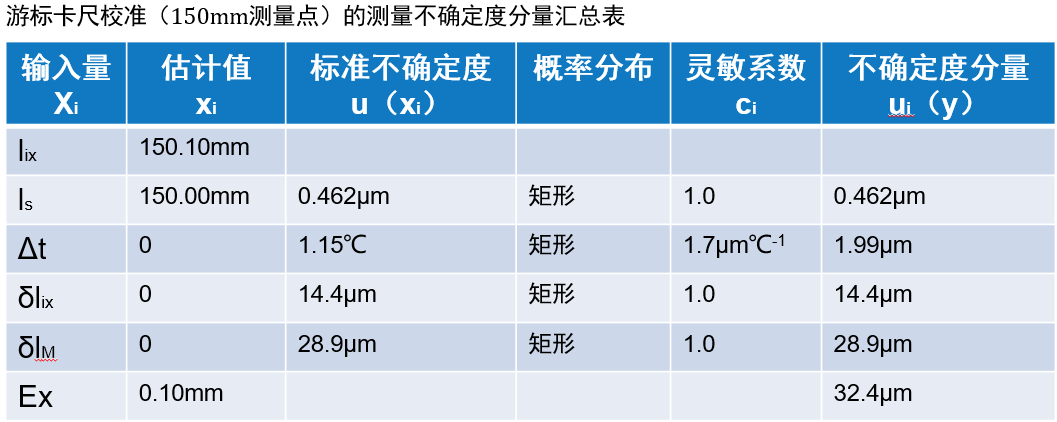
测量liX
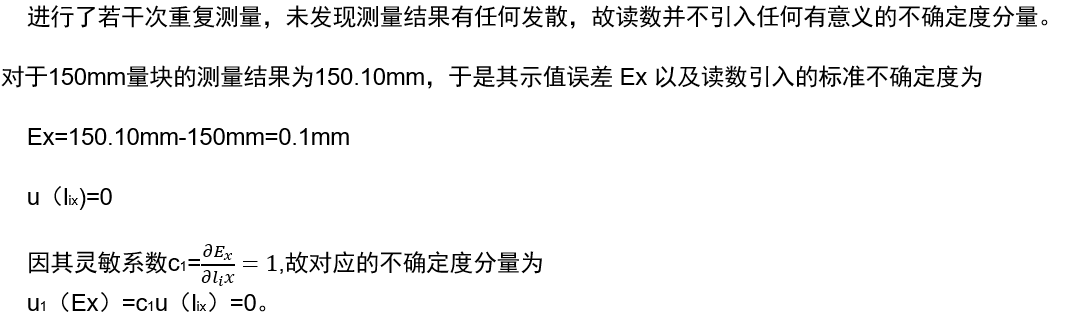
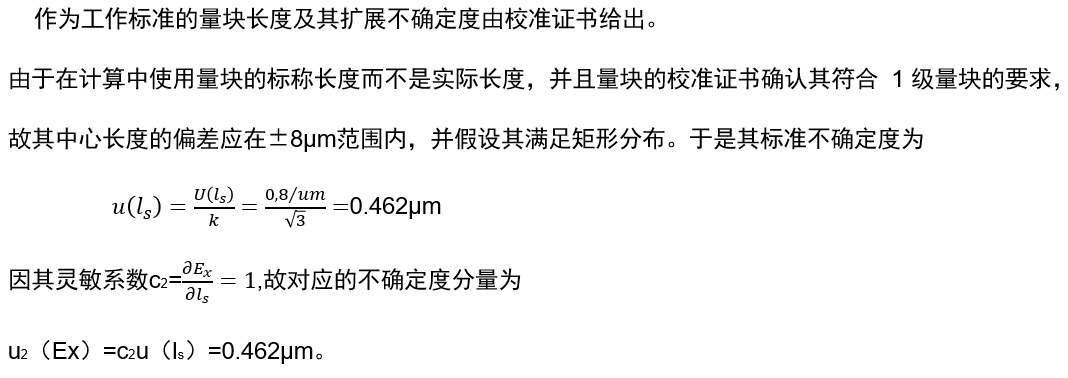
工作标准,ls
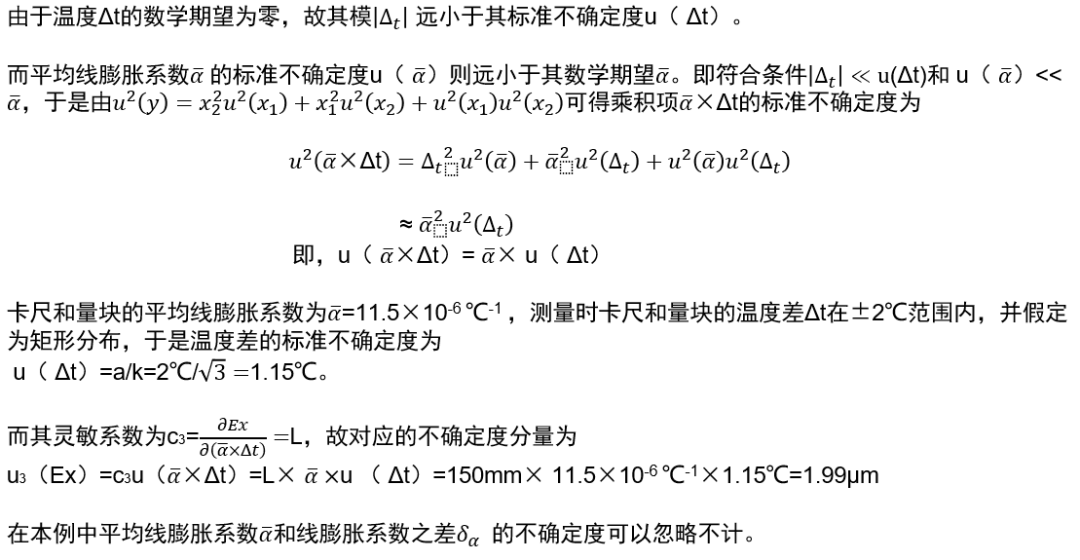
温度差α ×Δt
卡尺的分辨力,δ|ix

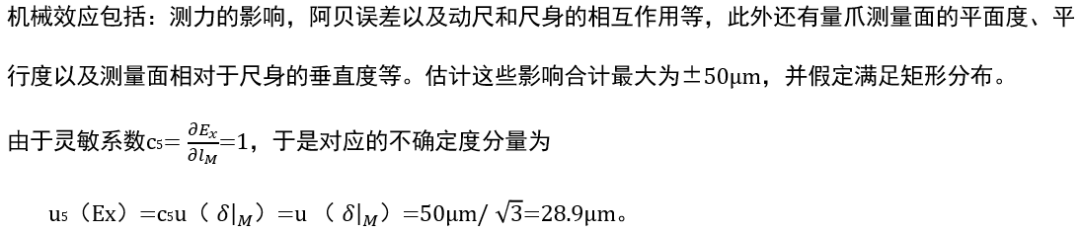
机械效应,δlM
5.列出不确定度分量汇总表
6.将各个不确定度分量ui(y)合成标准不确定度uc(y)

7.确定被测量Y可能值分布的包含因子
在测量结果的不确定度中,由机械效应和游标分辨力所引入的不确定度是两个明显占优势的分量。前者是分布区间半宽为50μm的矩形分布,而后者是分布区间半宽为25μm的矩形分布。
因此被测量的分布将不满足正态分布,而是上底和下底的半宽分别为25μm和75μm的梯形分布。对于该梯形,其对称轴两侧±60μm范围内的面积是梯形总面积的95%,这对应于包含因子k95=1.83.
8.确定扩展不确定度U或Up
由于最后的合成分布并不是正态分布,而是接近于上、下底之比?=0.33的梯形分布。
而该梯形分布的包含因子k95=1.83,于是
U95(Ex)=k95u(Ex)=1.83×32.4μm≈0.06mm
9.给出测量不确定度报告
在150mm测量点,卡尺的示值误差是Ex=(0.10±0.06)mm
所给扩展不确定度是由合成标准不确定度32.4μm乘以包含因子K95=1.83得到。该包含因子系根据角参数?=0.33的梯形分布以及所要求的包含概率p=95%计算得到。


往期精彩
分享 增量式光栅和绝对式光栅
干货 蔡司三坐标测针的安装指南
推荐 听说你在找UCCServer联机PC DMIS的方法
必读 三坐标误差补偿模型的鲁棒性?有这个名词?

















 5928
5928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









