






实验三自适应滤波
一.实验目的
1.熟练掌握自适应LMS算法及RLS算法的原理及应用;
2.根据题目一的背景条件,基于自适应系统逆辨识模型实现自适应均衡。
二.实验原理
1.自适应滤波原理
自适应滤波原理图,如图1所示。
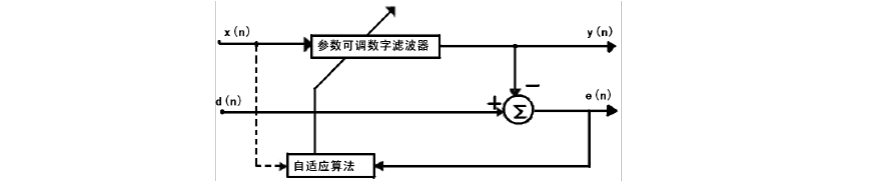
图1自适应滤波原理图
在自适应滤波器中,参数可调的数字滤波器一般为FIR数字滤波器,IIR数
字滤波器或格型数字滤波器。自适应滤波分2个过程。第一,输入信号()
x n通过参数可调的数字滤波器后得输出信号()
d n进行比较得误
y n与参考信号()
y n,()
差信号()
e n的值来调节参数可调的数
x n和()
e n;第二,通过一种自适应算法和()
字滤波器的参数,即加权系数,使之达到最佳滤波效果。
2.LMS算法
LMS算法是在最速下降法的基础上,用瞬时平方误差的梯度作为均方误差的梯度的估计值得到的,从而简化了计算量。LMS算法的一个显著性特点是它的简单性。此外,它不需要计算有关的相关函数,也不需要矩阵求逆运算。
其算法流程如下:
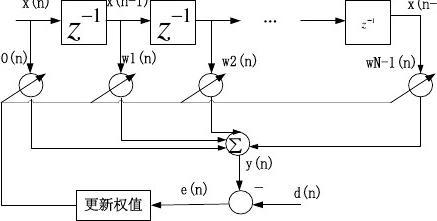
图2 LMS算法流程图















 2319
2319











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









