







 ResNet v1为解决深度神经网络随着层数增加性能下降的退化问题而设计,通过引入恒等映射和残差模块克服梯度消失,确保信息直接从前向后传播。ResNet网络结构包括Res18、Res34等,使用Bottleneck结构和1x1卷积降低计算复杂度。残差单元的特性允许梯度直接传递,避免信息冗余,且网络可以视为浅层网络的集成。
ResNet v1为解决深度神经网络随着层数增加性能下降的退化问题而设计,通过引入恒等映射和残差模块克服梯度消失,确保信息直接从前向后传播。ResNet网络结构包括Res18、Res34等,使用Bottleneck结构和1x1卷积降低计算复杂度。残差单元的特性允许梯度直接传递,避免信息冗余,且网络可以视为浅层网络的集成。
ResNetv1:https://arxiv.org/abs/1512.03385
pytorch 代码:https://github.com/pytorch/vision/blob/master/torchvision/models/resnet.py
keras 代码:https://github.com/keras-team/keras-applications/blob/master/keras_applications/resnet.py
1 ResNet v1要解决的问题
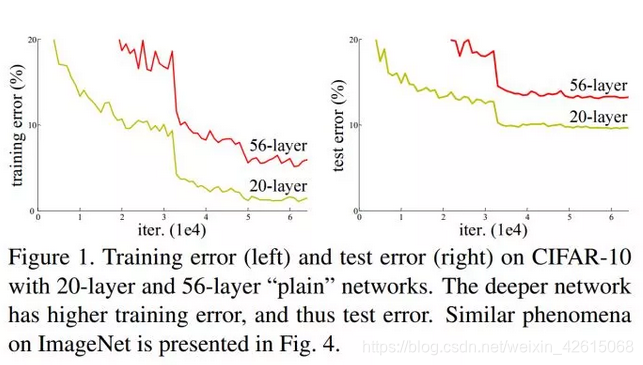
深度神经网络朝着网络层数越来越深的方向发展。直觉上我们不难得出结论:增加网络深度后,网络可以进行更加复杂的特征提取,因此更深的模型可以取得更好的结果。但事实并非如此,人们发现随着网络深度的增加,模型精度并不总是提升,并且这个问题显然不是由过拟合(overfitting)造成的,因为网络加深后不仅测试误差变高了,它的训练误差竟然也变高了。作者提出,这可能是因为更深的网络会伴随梯度消失/爆炸问题,从而阻碍网络的收敛。作者将这种加深网络深度但网络性能却下降的现象称为退化问题(degradation problem)。导致网络性能下降的原因是梯度消失问题, 神经网络在反向传播过程中要不断地传播梯度,而当网络层数加深时,梯度在传播过程中会逐渐消失(假如采用Sigmoid函数,对于幅度为1的信号,每向后传递一层,梯度就衰减为原来的0.25,层数越多,衰减越厉害),导致无法对前面网络层的权重进行有效的调整。
当传统神经网络的层数从20增加为56时,网络的训练误差和测试误差均出现了明显的增长,也就是说,网络的性能随着深度的增加出现了明显的退化。ResNet就是为了解决这种退化问题而诞生的,如图1所示。
2 ResNet v1解決退化问题的方案
一是通过在网络中增加BatchNormalization层, 二是构建恒等映射(Identity mapping), 恒等映射的结构如图2所示.
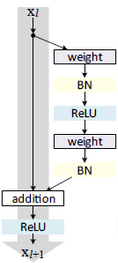
y l = h ( x l ) + F ( x l , W l ) ( 1 ) y_{l}=h(x_{l})+\mathcal{F}(x_{l},\mathcal{W}_{l}) \text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }(1) yl=h(xl)+F(xl,Wl) (1)
x l + 1 = f ( y l ) ( 2 ) x_{l+1}=f(y_{l}) \text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }(2) xl+1=f(yl) (2)
这里 x l x_{l} xl是第 l l l个残差单元的输入特征。 W = { W l , k ∣ 1 ≤ k ≤ K } \mathcal{W}=\{ \text{W}_{l,k|1\leq{k}\leq{K}} \} W={
Wl,k∣1≤k≤K}是一个与第 l l l个残差单元相关的权重和偏差的集合, K K K是残差单元内部的层的数量。 F \mathcal{F} F是残差函数。函数 f f f是元素加和后的操作(ResNet-v1中采用的是ReLU)。函数 h h h是恒等映射 h ( x l ) = x l h(x_{l})=x_{l} h(xl)=xl。
为什么是恒等映射呢,20层的网络是56层网络的一个子集,56层网络的解空间包含着20层网络的解空间。如果我们将56层网络的最后36层全部短接,这些层进来是什么出来也是什么(也就是做一个恒等映射),那这个56层网络不就等效于20层网络了吗,至少效果不会相比原先的20层网络差吧。同样是56层网络,不引入恒等映射为什么就不行呢?因为梯度消失现象使得网络难以训练,虽然网络的深度加深了,但是实际上无法有效训练网络,训练不充分的网络不但无法提升性能,甚至降低了性能。
关于残差模块的详细思考将通过以下章节进行介绍。
3 ResNet v1网络结构
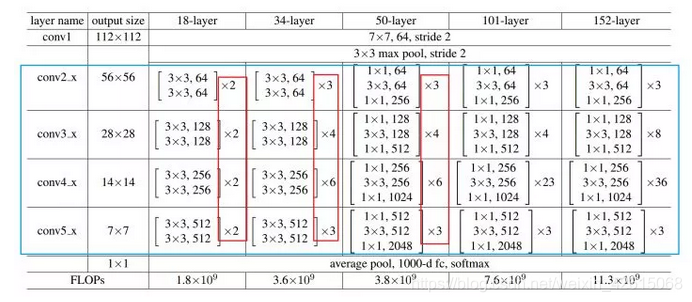
ResNet主要有五种主要形式:Res18,Res34,Res50,Res101,Res152;整体网络结构如图3所示, 残差单元如图4所示, 部分网络片段如图5所示。


-
1数据进入网络后先经过输入部分(conv1, bn1, relu, maxpool);
-
然后进入中间卷积部分(layer1, layer2, layer3, layer4,这里的layer对应我们之前所说的stage);
-
最后数据经过一个平均池化和全连接层(avgpool, fc)输出得到结果;
从layer1-4, 每个层中的第一个残差模块的残差部分采用步长为2的卷积进行下采样,所以在shortcut connection中要采用步长为2的1×1的卷积进行维度的匹配,如图5中的实线部分, 采用的计算方式为H(x)=F(x)+Wx,其中W是卷积操作,用来调整x维度的。剩余其他的残差单元都采用步长为1的卷积,shortcut connection直接连接输入和输出,如图5中虚线部分,采用计算方式为H(x)=F(x)+x。
ResNet v1网络设计规律
整个ResNet不使用dropout,全部使用BN。此外,回到最初的这张细节图,我们不难发现一些规律和特点:
- 受VGG的启发,卷积层主要是3×3卷积;
- 对于相同的输出特征图大小的层,即同一stage,具有相同数量的3x3滤波器;
- 如果特征地图大小减半,滤波器的数量加倍以保持每层的时间复杂度;
- 每个stage通过步长为2的卷积层执行下采样,而却这个下采样只会在每一个stage的第一个卷积完成,有且仅有一次。
- 网络以平均池化层和softmax的1000路全连接层结束,实际上工程上一般用自适应全局平均池化 (Adaptive Global Average Pooling);
相比传统的分类网络,这里接的是池化,而不是全连接层。池化是不需要参数的,相比于全连接层可以砍去大量的参数。对于一个7x7的特征图,直接池化和改用全连接层相比,可以节省将近50倍的参数,作用有二:一是节省计算资源,二是防止模型过拟合,提升泛化能力;
Bottleneck结构和1×1卷积
ResNet50起,就采用Bottleneck结构,主要是引入1x1卷积。我们来看一下这里的1x1卷积有什么作用:
- 对通道数进行升维和降维(跨通道信息整合),实现了多个特征图的线性组合,同时保持了原有的特征图大小;
- 相比于其他尺寸的卷积核,可以极大地降低运算复杂度;
- 如果使用两个3x3卷积堆叠,只有一个relu,但使用1x1卷积就会有两个relu,引入了更多的非线性映射;
我们来计算一下1*1卷积的计算量优势:首先看上图右边的bottleneck结构,对于256维的输入特征,参数数目:1x1x256x64+3x3x64x64+1x1x64x256=69632,如果同样的输入输出维度但不使用1x1卷积,而使用两个3x3卷积的话,参数数目为(3x3x256x256)x2=1179648。简单计算下就知道了,使用了1x1卷积的bottleneck将计算量简化为原有的5.9%,收益超高。
4 ResNet v1残差单元有效性的理解
从梯度反向传播理解ResNet的有效性
紧接第二部分公式1和公式2, 如果 f f f是一个恒等映射: x l + 1 ≡ x l x_{l}+1≡x_{l} xl+1≡xl,我们可以把公式2带入公式1,得到:
x l + 1 = x l + F ( x l , W l ) ( 3 ) x_{l+1}=x_{l}+\mathcal{F}(x_{l},\mathcal{W}_{l}) \text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }\text{ }(3) xl+1=xl
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2058
2058

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









