






一、基础测距算法
-
TW-TOF(双向飞行时间法)
S = \frac{C \times [(T_{a2} - T_{a1}) - (T_{b2} - T_{b1})]}{2}S=2C×[(Ta2−Ta1)−(Tb2−Tb1)]
通过标签与基站之间的双向信号交互计算飞行时间,消除时钟同步依赖。公式为:其中,CC为光速,T_{a1}/T_{a2}Ta1/Ta2为标签发送/接收时间戳,T_{b1}/T_{b2}Tb1/Tb2为基站响应时间戳。该方法显著降低设备同步要求,适合动态场景。
-
TWR(双向测距法)
在TW-TOF基础上优化,通过多轮信号交互(请求-响应-确认)提升抗干扰能力。标签与基站交替发射信号,计算多次往返时间均值,精度可达厘米级。
二、核心定位算法
-
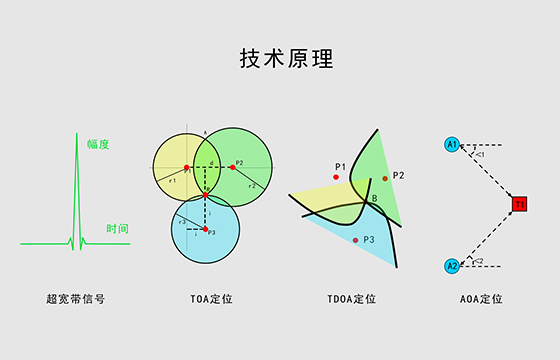
TOA(到达时间法)
- 原理:通过测量信号从标签到基站的单程传播时间计算距离,需标签与基站严格同步时钟。
- 公式:d = c \times td=c×t,误差来源于时钟同步精度(纳秒级误差可导致米级定位偏差)。
- 应用:高精度工业制造场景(如芯片装配),需配合原子钟或光纤同步技术。
-
TDOA(到达时间差法)
- 原理:多个基站接收同一标签信号,计算信号到达各基站的时间差,通过双曲线相交确定位置。
- 优势:仅需基站间同步,降低系统复杂度;适合大规模部署场景(如智能工厂、仓储物流)。
- 案例:某汽车工厂采用TDOA算法实时追踪500+设备,定位误差<15cm。
-
AOA(到达角法)
通过天线阵列测量信号入射角度,结合单基站实现二维定位。优势在于低基站密度需求,但易受多径效应影响,需配合滤波算法优化。
三、定位计算与优化方法
-
三边定位法(Trilateration)
- 原理:以三个基站为圆心、测距值为半径画圆,交点即为标签位置。
- 公式:基于几何方程组求解:\begin{cases} (x - x_1)^2 + (y - y_1)^2 = d_1^2 \\ (x - x_2)^2 + (y - y_2)^2 = d_2^2 \\ (x - x_3)^2 + (y - y_3)^2 = d_3^2 \end{cases}⎩⎨⎧(x−x1)2+(y−y1)2=d12(x−x2)2+(y−y2)2=d22(x−x3)2+(y−y3)2=d32
- 缺陷:实际测量误差导致圆无法完美相交,需引入最小二乘法优化。
-
最小二乘优化(LSM)
\hat{\theta} = (H^T H)^{-1} H^T zθ^=(HTH)−1HTz
用于处理多基站冗余数据,通过最小化残差平方和求解最优位置。公式为:其中,HH为几何矩阵,zz为观测向量,显著提升复杂环境下的定位稳定性。
四、算法对比与场景适配
| 算法 | 精度 | 同步要求 | 适用场景 | 案例 |
|---|---|---|---|---|
| TOA | 厘米级 | 标签-基站严格同步 | 高精度工业制造 | 品铂科技 (芯片装配车间) |
| TDOA | 10-30cm | 基站间同步 | 工厂、仓储 | 品铂科技(一汽汽车制造工厂) |
| AOA | 亚米级 | 无需严格同步 | 低密度基站区域 | 商场动态导航 |
| TW-TOF | 厘米级 | 无需同步 | 动态目标追踪 | 机器人导航 |
五、技术挑战与优化方向
- 非视距(NLoS)误差:通过融合惯性传感器(IMU)数据或LiDAR点云,修正信号遮挡导致的误差。
- 多径干扰抑制:采用跳时扩频(TH-SS)和脉冲整形技术,增强复杂电磁环境下的信号鲁棒性。
- 低功耗设计:优化标签的间歇性唤醒机制,延长电池寿命(品铂科技 医疗监护标签续航>2年)。
以上内容综合UWB主流算法原理与产业实践,涵盖测距、定位计算及优化全流程,适用于工业、物流、医疗等场景的高精度需求。

















 1491
1491

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









