







本系列分享一些生活中遇到的可靠性例子,以及从中引发的思考,涉及的知识。
上周末通过佛山12345反馈了一个红绿灯设置不合理的问题。这条马路双向4车道,但人行道绿灯只有10秒。行人刚走几步,绿灯就开始倒计时了,存在巨大交通安全隐患。
我当时反映问题的时候,以为是人为设置的这么短。但昨天我又测了下,发现这个时间又变短了,只有8秒。我想起一个月前我想投诉的时候,这个红绿灯还有13秒。也就是说这个绿灯时间在不断的缩短。
很多红绿灯有根据流量去调整绿信比(在一个周期时间内,有效绿灯时间与周期时间之比)。一开始我怀疑是这个原因。但据我观察,基本没有流量的这边,绿灯反而是时间非常长,而经常过行人的这边,绿灯时间非常短。
因此,我怀疑两个原因:
1.程序写反了,把两个路口的绿信比搞反了,有这种可能。
2.存在计时累积不精确问题。
当然这只是我的猜想,真实原因不清楚。只是从这个事件出发,我联想到了计时问题。
典型的是选择的计时函数不精确导致的累积误差。有很多计时函数,它们的精确度并不是那么精准。
比如C语言的计时函数:time(),可移植性好,性能也很稳定,但精度太低,只能精确到秒,对于一般的事件计时还算够用,而对运算时间的计时就明显不够用了。
又如clock(),可以精确到毫秒,适合一般场合的使用。
而QueryPerformanceFrequency()函数,精度可以到微秒级。
这种由于选择库函数不同导致的计时偏差问题,在编程中应该注意。这点我在软件可靠性系列文章里也有讲过,见《系统性谈谈软件可靠性——第1讲:软件可靠性基础概念》。
从这个案例出发,我又联想到时间偏差问题以及相对论的钟慢效应。
时间偏差是很要命的。比如说导弹,它速度非常快,时间偏差一点,位置就差远了。
又如我们平时用得地图导航,如果定位不精确,那能给你导航到沟里去了。
爱因斯坦的相对论,很重要的一个实际应用就是在提高导航的精度上。下面做个简单的介绍。
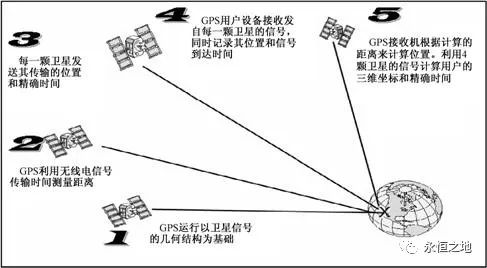
我们都知道导航是靠卫星定位。如图所示,GPS卫星定位的原理如下:
GPS卫星在空中连续发送带有时间和位置信息的无线电信号,供GPS接收机接收。由于传输的距离因素,接收机接收到信号的时刻要比卫星发送信号的时刻延迟,通常称之为时延,因此,可以通过时延来确定距离,根据4颗卫星确定用户的坐标。
在以前,想用卫星来测量距离,会产生极其恐怖的误差,今天测在这里,再过10天测量,定位已经跑到110公里外的其他地方。
最核心的原因,就是爱因斯坦狭义相对论中的钟慢效应:速度越快,时间流逝速度就越快。
导航卫星在高速运动,卫星上的时间流逝速度和地面上不一样。因此,如果卫星上和地方上采用同样的时间参数进行计算,就会得出非常离谱的距离差距。
导航的精度有多高,跟你对卫星上带的原子时钟时间的修正精度多高有很大关系(除了这点,还有很多其他因素导致的时间误差,这里不做介绍)。这个时间修正值,就是用相对论计算出来的,公式如下:
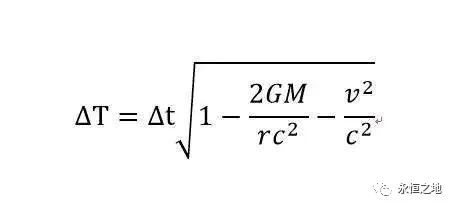
其中:M地球质量,G引力常数,r物体与地球中心距离(注意不是地面距离),v为物体相对地球中心速度,c光速。
根据这个公式计算,导航卫星的时间流逝每天要比地球时间快38微秒,要保证精度,就需要把这38微秒,分到每分每秒去校准,才能保证你任何时打开导航,都是精确的。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









