







文章目录
2020
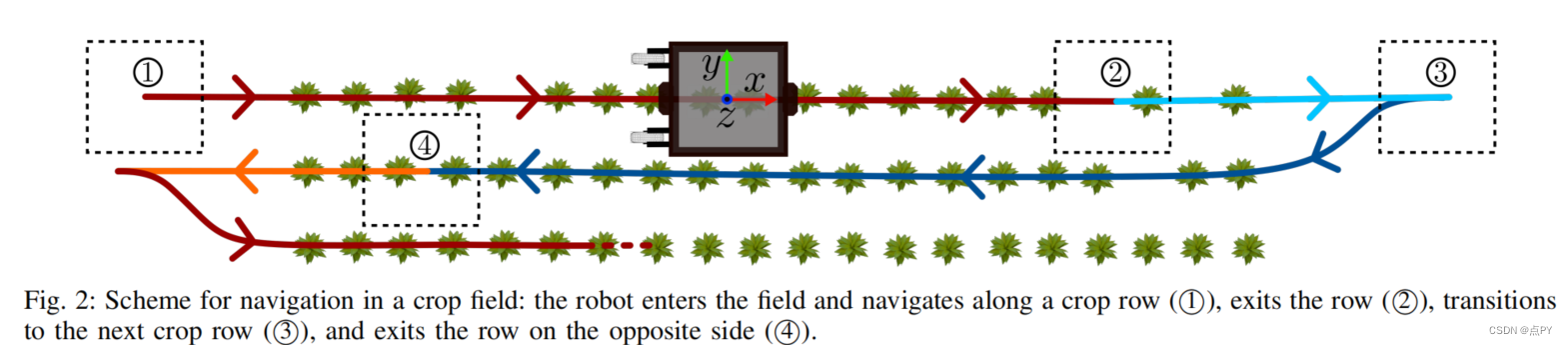
Visual Servoing-based Navigation for Monitoring Row-Crop Fields
code: https://github.com/PRBonn/visual-crop-row-navigation
摘要: 自主导航是野外机器人执行精确农业任务的先决条件。通常情况下,机器人必须在一个季节内在整个农田中导航几次,以监测植物、施用农用化学品或执行有针对性的干预行动。在本文中,我们提出了一个利用常规的作物行结构进行行作物田导航的框架。我们的方法只使用来自车载摄像机的图像,而不需要执行显式定位或维护现场地图,因此可以在没有农业自动化系统中经常使用的昂贵的RTK-GPS解决方案的情况下运行。我们的导航方法允许机器人准确地跟随裁剪行,并在同一框架内无缝地处理到下一行的开关。我们使用C++和ROS实现了我们的方法,并在几个不同形状和大小的模拟环境中进行了彻底的测试。我们还演示了在测试行作物现场运行的实际机器人上以帧率运行的系统。代码和数据已经发布。

2023
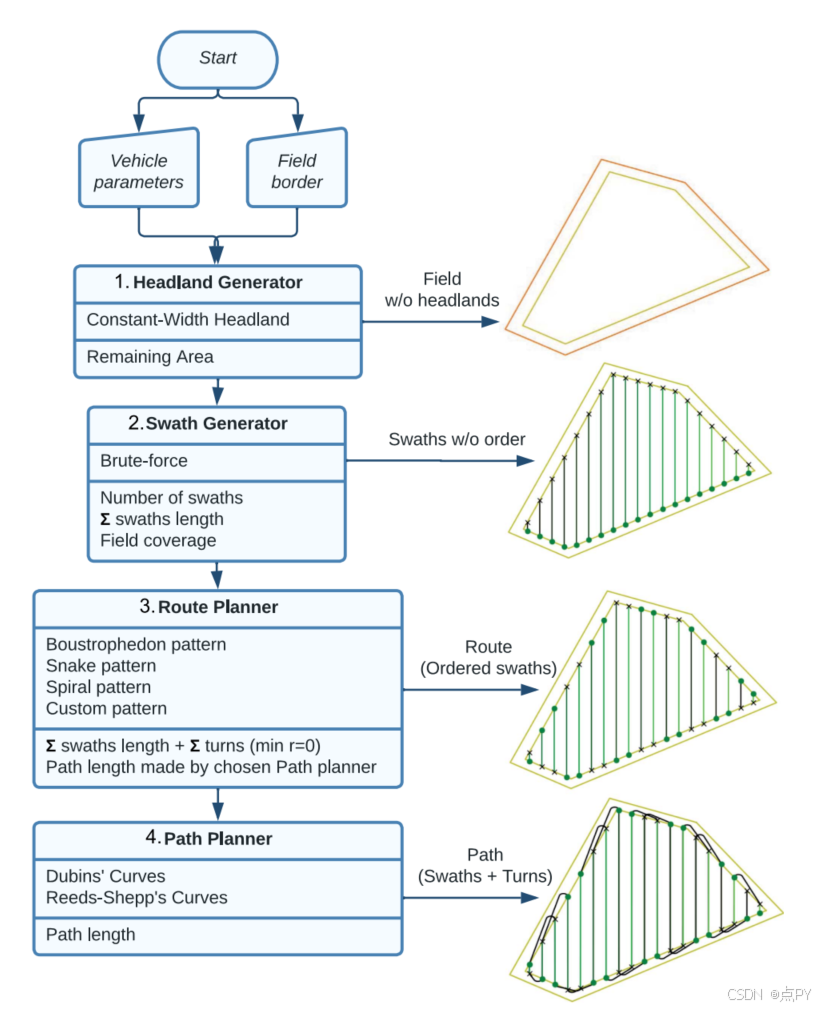
Fields2Cover: An Open-Source Coverage Path Planning Library for Unmanned Agricultural Vehicles
code: https://github.com/Fields2Cover/Fields2Cover
摘要: 这封信描述了Fields2Cover,一个新的农业车辆覆盖路径规划(CPP)的开源库。虽然现在有几种CPP解决方案,但在将它们统一到一个开源库中并提供基准测试工具来比较它们的性能方面的努力有限。Fields2Cover为规划覆盖路径、开发新技术和基准测试最先进的算法提供了一个框架。该库具有模块化和可扩展的架构,支持各种车辆,并可用于各种应用程序,包括农场。它的核心模块是:一个岬发电机,一个带发电机,一个路线规划器和一个路径规划器。一个到机器人操作系统(ROS)的接口也作为一个附加组件提供。在这封信中,使用8种最先进的方法和7个目标函数演示了图书馆规划农业覆盖路径的功能。
2024
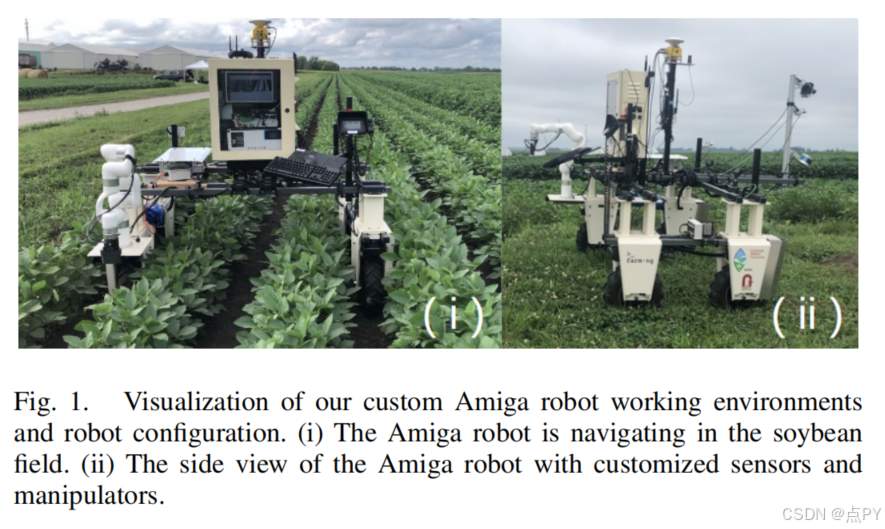
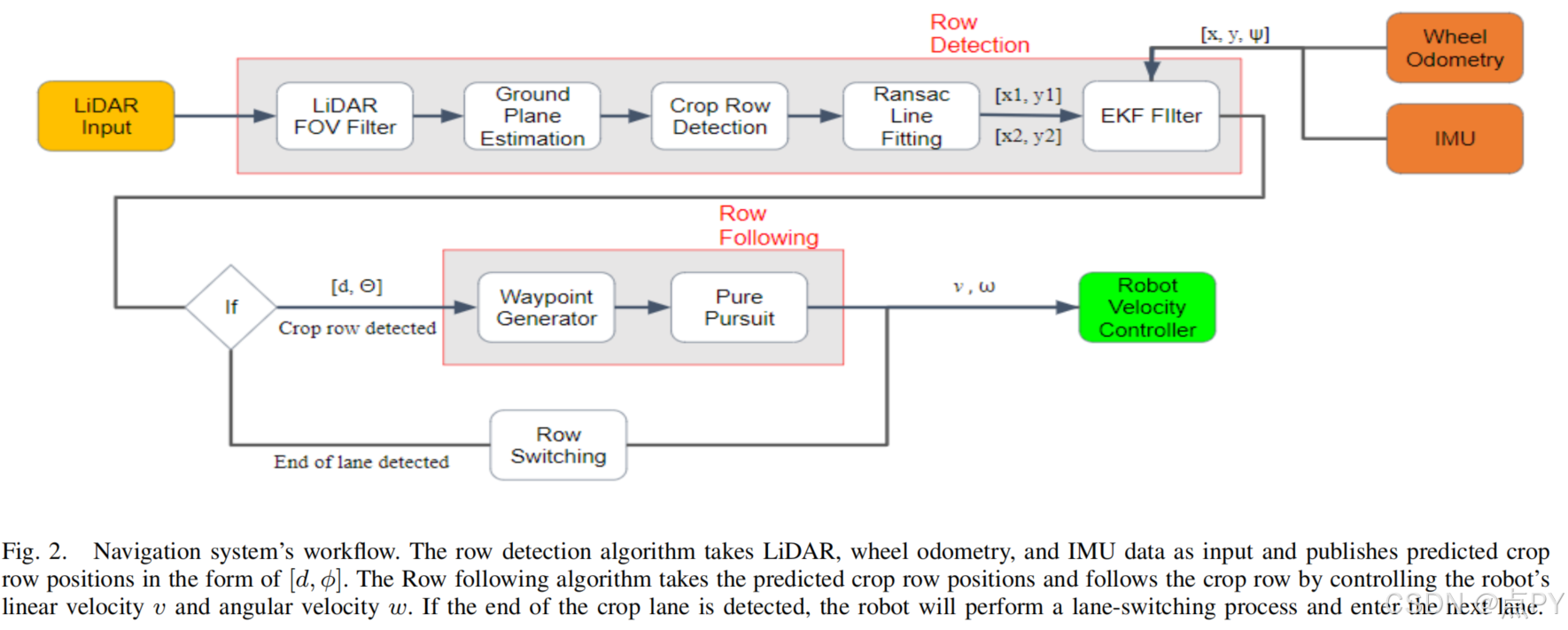
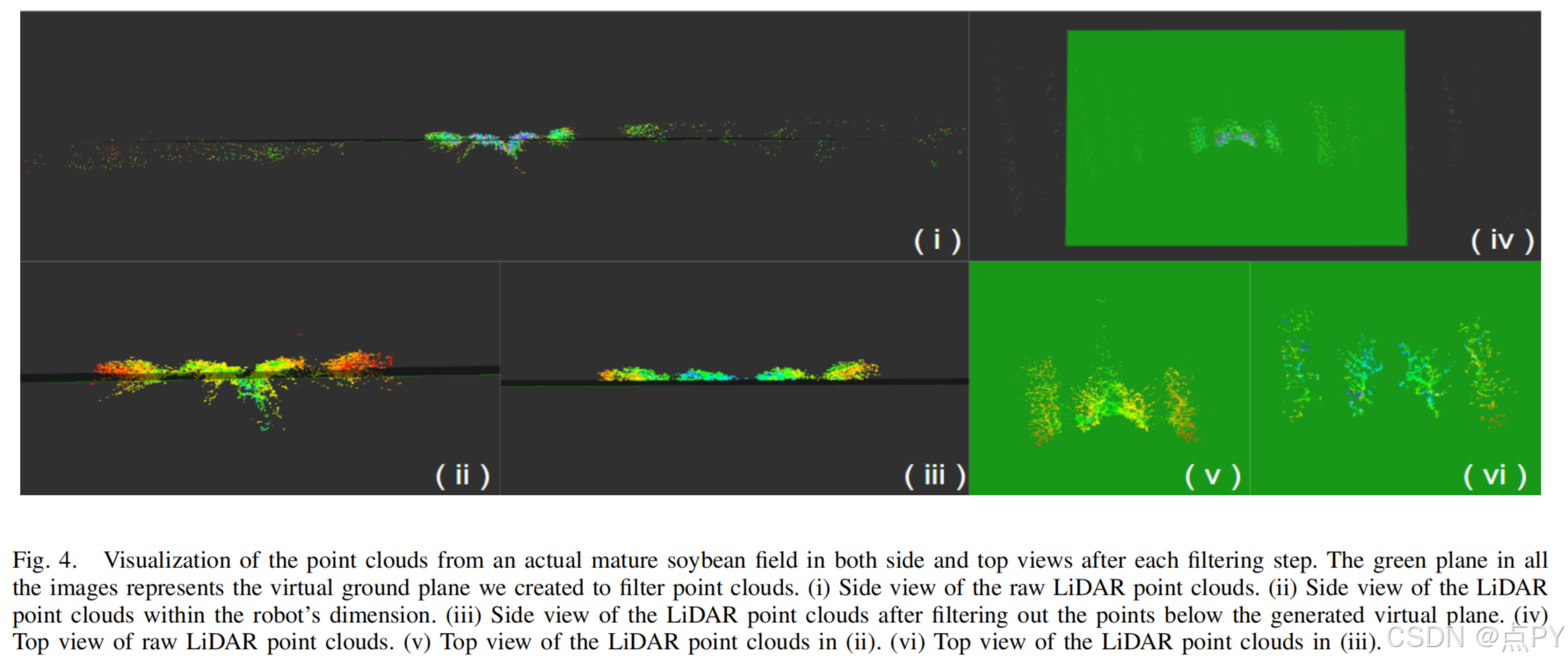
LiDAR-Based Crop Row Detection Algorithm for Over-Canopy Autonomous Navigation in Agriculture Fields
code: https://cs.paperswithcode.com/paper/lidar-based-crop-row-detection-algorithm-for
摘要: 自主导航对于农业中的各种机器人应用至关重要。然而,许多现有的方法依赖于RTK-GPS系统,这些系统成本昂贵,容易信号覆盖差。本文介绍了一种最先进的基于激光雷达的导航系统,该系统可以在行作物实现冠层自动导航,即使冠层完全阻塞了行间距。我们的作物行检测算法可以检测不同场景中的作物行,包括各种作物类型、生长阶段、杂草的存在和作物行内的不连续性。在不利用机器人的全局定位的情况下,我们的导航系统可以在这些具有挑战性的场景中执行自动导航,检测作物行的末端,并自动导航到下一个作物行,提供了一种与作物无关的方法来导航整个行-作物领域。该导航系统已在各种模拟农业领域进行了测试,在没有人工干预定制的Amiga机器人的情况下,实现了平均2.98厘米的自动驾驶精度。此外,我们的作物行检测算法从实际大豆田的定性结果验证了我们基于激光雷达的作物行检测算法在实际农业应用中的潜力。


















 928
928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











