







 本文介绍了使用PCL库在计算机视觉领域实现凸包(convex hull)和凹包(concave hull)的方法。通过四个步骤详细讲解了从预处理、IO操作、滤波到构建分割模型的全过程,最终实现点云数据的凸包和凹包效果。
本文介绍了使用PCL库在计算机视觉领域实现凸包(convex hull)和凹包(concave hull)的方法。通过四个步骤详细讲解了从预处理、IO操作、滤波到构建分割模型的全过程,最终实现点云数据的凸包和凹包效果。
PCL实现分割凸包或者凹包convex/concave hull
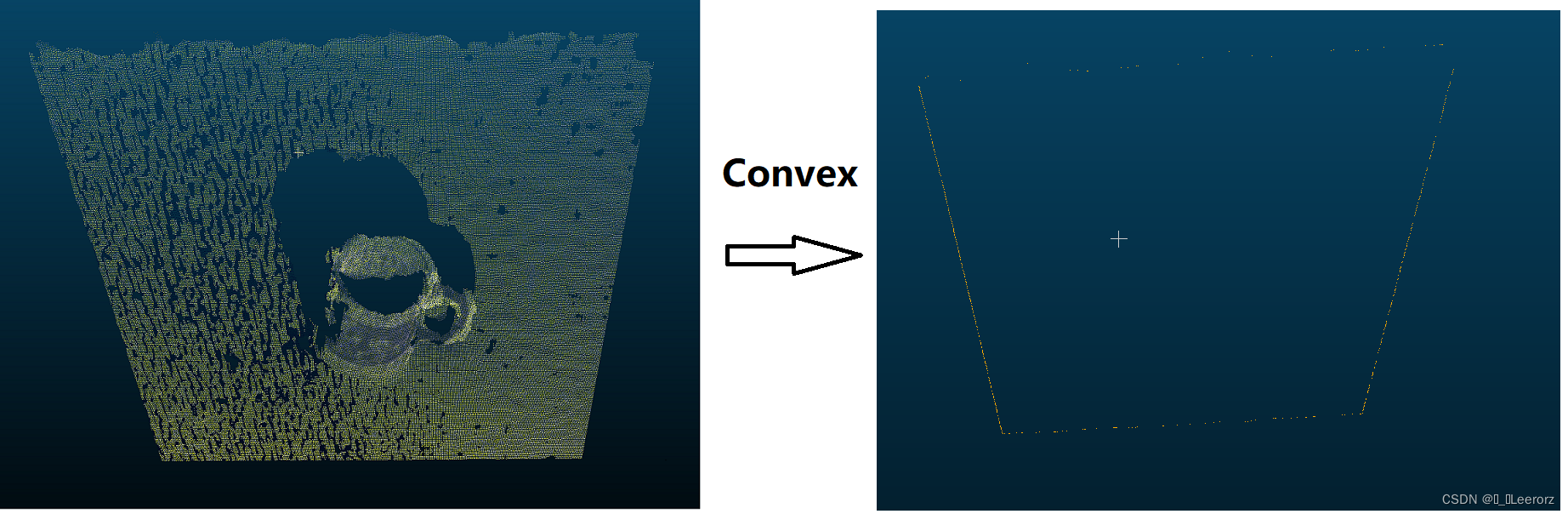
1. PCL实现凸包或凹包convex/concave hull效果展示
2. 编译时注意事项
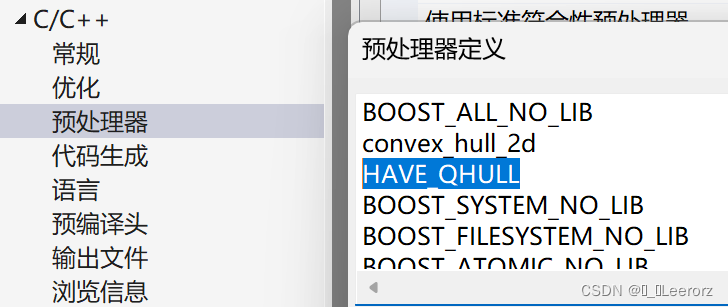
NOTE: 添加预处理器定义HAVE_QHULL的同时必须删掉DISABLE_QHULL
3. 代码实现
代码实现分成1 2 3 4 个步骤:
3.1 预处理,IO和直通滤波器
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/sample_consensus/method_types.h>
#i
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











