







图
2019年7月22日
22:30
(1)图的简单概念
-
顶点(vertex):图中的数据元素,V是顶点的一个有穷非空集合
-
VR:顶点关系的集合。
-
弧(Arc):若<v,w>属于VR, 则<v,w>表示从v到w的一条弧,弧是有向的,边(Edge)是无向
-
有向图(Digraph):弧<v,w>为有序对
-
无向图(Undigraph):边(v,w)为无序对
-
完全图(Completed graph):有0.5 * n * (n-1)条边,n为顶点个数
-
有向完全图:有n * (n-1)条弧,n为顶点个数
-
稀疏图(Sparse graph):有很少边或弧的图
-
稠密图(Dense graph):有很多边或弧的图
-
权(Weight):与图有关的边或弧相关的数,这些全部可以表示从一个顶点到另一个顶点的距离或者耗费
-
网(Network):带权的图
-
邻接点(adjacent):对于无向图G=(V, {E}),如果边(v,v1)属于E,则称顶点v和v1为邻接点,边(v,v1)依附于顶点v,v1,或者说边(v,v1)和顶点相关联,有e(Edge) = 0.5 * 度(Degree)
-
入度(Indegree),出度(Outdegree),有e(Arc)= 0.5 * 【indegree(vi)+ outdegree(vi)】,注释:vi表示第i条边。
-
路径的长度:路径上的边或者弧的数目。
-
回路/环(Cycle):第一个顶点和最后一个顶点相同的路径
-
简单路径:路径上的顶点不重复出现的路径
-
简单回路/简单环:除了第一个和最后一个顶点之外,其余顶点不重复的回路。
-
连通:在无向图G中,如果从顶点v到顶点v1有路径,则称v和v1是连通的。
-
连通图(Connected graph):对于图中的任意两个顶点vi,vj属于V,vi和vj都是连通的,则称G是连通图。
-
连通分量(Connected component):是无向图中的极大连通子图。如1,2,3都是G3的连通分量。

-
强连通图:有向图的连通图。
-
强连通分量:有向图的连通分量。
-
生成树:一个连通图(无向)的极小连通子图(无环)。
极小连通子图:有全部的n个顶点,有n-1条边的连通子图。
(2)图的存储结构
- 顺序映像结构:数组
- 链式映像结构:链表
1,邻接矩阵:
- 时间复杂度O(n2+e*n)其中n2为初始化,e*n为建立变之间的关系。
- 无向图:顶点vi的度为第i行(列)的元素之和。
- 有向图:顶点vi的度为第i行(出度数)和第i列(入度数)元素之和。
2,邻接表:
无向图:
有向图:


3,十字链表:是有向图的另一种链式存储结构

4,邻接多重表:是无向图的另一种链式存储结构
(3)图的遍历

1,深度优先遍历(Depch_First Search):
- 概念:从图概中的某个顶点v出发,访问此点,然后依次从v未被访问的邻接点出发深度优先遍历图,直至图中所有和v有路径相通的顶点都被访问到;若此图还有顶点未被访问,则选图中另一个未曾被访问的顶点作为起点,重复上述过程。
- 结果:v1 v2 v4 v8 v5 v3 v6 v7
2,广度优先遍历(Breadth_First Search):
- 概念:访问图中某顶点v,之后依次访问v的各个未曾访问过的邻接点,然后分别从这些邻接点出发依次访问它们的邻接点,并使“先被访问的顶点的邻接点”先于“后被访问的顶点的邻接点”被访问。
- 结果:v1 v2 v3 v4 v5 v6 v7 v8
3,生成树:连通图的极小连通子图(无环)

一个生成树为:

4,最小生成树:(prim和kruskal算法)
-
MST性质:假设N = (V, {E})是一个连通网,U是顶点集合V的一个非空子集。若(u,v)是一条具有最小权值(代价)的变,其中u∈U,v∈V-U,则必存在一颗包含边(u,v)的最小生成树。
-
prim算法:时间复杂度O(n^2),适合边稠密的图。


-
kruscal算法:时间复杂度O(e*log e),适合边稀疏的图
- 概念:假设连通网N = (V,{E})。则令最小生成树的初始状态为只有n个顶点而无边的非连通图T = (V,{}),图中每个顶点自成一个连通分量。在E中选择代价最小的边,若该边的顶点落在不同的连通分量上,则将此边加入到T中,否则舍去此边而选择下一条代价最小的边。
- 图解:


顶点活动网(Activity On Vertex Network)AOV网(不出现环)
- 概念:顶点表示活动,边表示活动的先后关系的有向无环图。
边表示活动网(Activity On Edge)AOE网(不出现环)
- 概念:顶点表示活动,边表示活动的先后关系,权表示活动持续的时间。
拓扑排序
-
概念:由某个集合上的偏序得到该集合上的全序的操作称为拓扑排序。
即:在AOV网中,若不存在回路,则所有活动可以排成一个线性序列,使得每个活动的前驱活动都排在该活动之前,我们把此序列称作拓扑序列(Topological order),由AOV网构造托剖序列的过程称为拓扑排序。 -
构造方法:
(1)在有向图中选一个没有前驱的顶点且输出之。
(2)从图中删除该顶点和所有以它为尾的弧。
(3)重复直到所有的点均已输出。 -
示例:
第一次构造:
输出为v1。
最后依次输出为:v1,v2,v3,v4,v5,v6


最短路径
- Dijkstra算法:
-
基本原理:
假设arcs[i][j]为顶点i和j边上的权值,即为一个邻接矩阵。
(1)选定一个顶点vi,vi到终点的距离设为D[i]。
(2)选中一个终点vj ∈ min{ D[j], j ∈ 剩余顶点 },使得vi -> vj最小。
(3)在剩余的点中选择一个顶点vk,进行如下计算:
若 D[j] + arcs[j][k] < D[i] //表示vi -> vk的距离大于vi -> vj -> vk的距离
做如下更新:
D[k] = D[j] + arcs[j][k]
重复(2)(3)步骤。 -
例图:
-
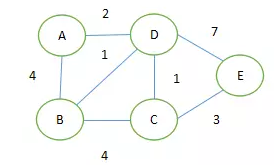
D[D] = 2
D[B] = 4
D[C] = ∞
D[E] = ∞
第一次执行:
选择D,
因为
D[D] + arcs[D][B] < arcs[A][B]
故更新
D[B] = D[D] + arcs[D][B]
依次执行就可以获得到各个终点的最短路径。















 4010
4010











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









