







 本文详细介绍了数字图像处理中的傅里叶变换原理,包括空域到频域的转换、图像恢复和噪声去除。通过实例展示了如何使用Python的numpy和cv2库实现傅里叶变换,并讲解了带通/带阻滤波器在去除周期性噪声中的应用。文章提供了相关资源链接和代码示例,帮助读者深入理解图像处理中的频域分析。
本文详细介绍了数字图像处理中的傅里叶变换原理,包括空域到频域的转换、图像恢复和噪声去除。通过实例展示了如何使用Python的numpy和cv2库实现傅里叶变换,并讲解了带通/带阻滤波器在去除周期性噪声中的应用。文章提供了相关资源链接和代码示例,帮助读者深入理解图像处理中的频域分析。
2021年10月21日10:24:05
占坑,这周五图像处理课讲完PPT后填。
2021年10月22日21:07:55 -> 讲课完毕
数字图像处理、图像恢复,噪声去除PPT
图像处理课课件,包含图像恢复、噪声去除部分内容及相关注解
链接: https://pan.baidu.com/s/1wBfXM0ZrSw3O221GUShVtw 密码: 424w
--来自百度网盘超级会员V5的分享
分割线
说明:在准备课件上台讲解的时候,为去除周期性噪声,需在频域上进行操作;所以在网上查看了许多视频博客知乎等,有了初步的理解,现在将收集的资料整理出来,并发布到博客,在网上参考的地方,我会一一给出参考,方便其它同学快速理解将图像从空域到频域转换的这个过程,也提供一些比较好的博文及视频,希望能对你有参考作用!
1、图像空域到频域的转换
以下内容来自BILIBILI的一个非常棒的视频:《P04 图像的快速傅里叶变换及其应用,作者:flybirdAI》
说明:图像和公式来自此视频中的截图,此视频讲的非常的好,清晰明了,对于空域到频域的转换,不涉及代码的话看前28分钟就足够了!
频域变换一般过程:
原图->DFT/FFT(正变换)->中心化->频域显示(处理)->去中心化->IDFT/IFFT(反变换)->原图
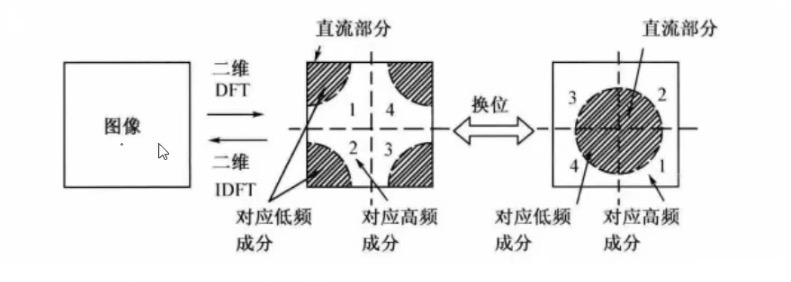
图像高频:亮度或灰度变化激烈的部分,如边缘和轮廓
图像低频:变化不大或变化较为平缓的地方,如大块的结构
DFT(离散傅里叶变换):Discrete Fourier transform
FFT(快速傅里叶变换):Fast Fourier transform
二维图像(M行N列)
正变换:
F
(
u
,
v
)
=
∑
x
=
0
M
−
1
∑
y
=
0
N
−
1
f
(
x
,
y
)
e
−
j
2
π
(
u
x
/
M
+
v
y
/
N
)
F(u, v)=\sum_{x=0}^{M-1} \sum_{y=0}^{N-1} f(x, y) e^{-j 2 \pi(u x / M+v y / N)}
F(u,v)=x=0∑M−1y=0∑N−1f(x,y)e−j2π(ux/M+vy/N)
反变换: f ( x , y ) = 1 M N ∑ u = 0 M − 1 ∑ v = 0 N − 1 F ( u , v ) e j 2 π ( u x / M + v y / N ) f(x, y)=\frac{1}{M N} \sum_{u=0}^{M-1} \sum_{v=0}^{N-1} F(u, v) e^{j 2 \pi(u x / M+v y / N)} f(x,y)=MN1u=0∑M−1v=0∑N−1F(u,v)ej2π(ux/M+vy/N)
其中下式为欧拉公式:
e
j
θ
=
cos
(
θ
)
+
j
sin
(
θ
)
e^{j \theta}=\cos (\theta)+j \sin (\theta)
ejθ=cos(θ)+jsin(θ)
频域分析就是对F(u,v)进行操作:
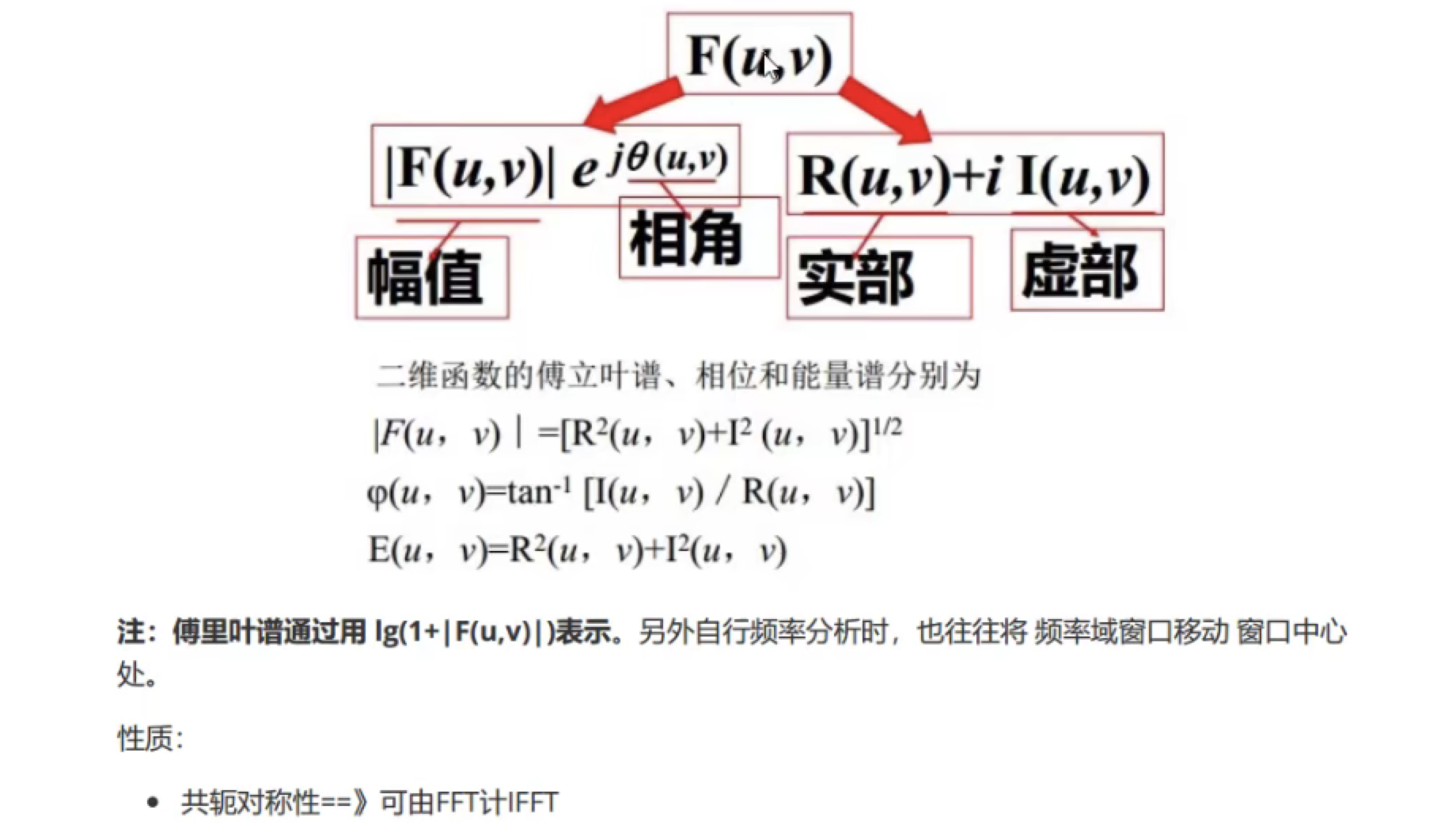
由于共轭对称性:可对FFT变换的结果再进行FFT变换得到IFFT(I指的是反变换,IFFT反快速傅里叶变换,将图像从频域转换到空域)
注:傅里叶谱通过对log(1+F|(u,v)|)表示,另外自行频率分析时,也往往将频率窗口移动窗口中心处。
FFT还可以做卷积:
- 将图像和卷积模板都进行正变换到频率域
- 将两者在再频域直接进行相乘运算
- 再反变换到空间域作为输出
频域变换过程时刻牢记下图:

分割线
如果深入理解后,可以观看3Blue1Brown的视频:【官方双语】形象展示傅里叶变换
2、代码实现傅里叶变换
代码:【原文博客:python的numpy库和cv2库实现图像傅里叶变换】
# writer:wojianxinygcl@163.com
# date : 2020.3.30
# 原文地址 : https://www.cnblogs.com/wojianxin/p/12530172.html
import cv2
import numpy as np
from matplotlib import pyplot as plt
def fft_cv(img):
"""
用cv进行傅里叶变换
:param img:
:return:
"""
# 傅里叶变换
dft = cv2.dft(np.float32(img), flags=cv2.DFT_COMPLEX_OUTPUT)
dftshift = np.fft.fftshift(dft)
res1 = 20 * np.log(cv2.magnitude(dftshift[:, :, 0], dftshift[:, :, 1]))
# 傅里叶逆变换
ishift = np.fft.ifftshift(dftshift)
iimg = cv2.idft(ishift)
res2 = cv2.magnitude(iimg[:, :, 0], iimg[:, :, 1])
# 显示图像
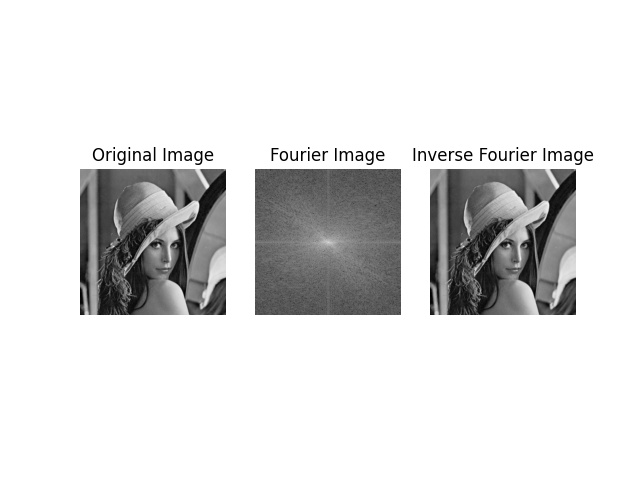
plt.subplot(131), plt.imshow(img, 'gray'), plt.title('Original Image')
plt.axis('off')
plt.subplot(132), plt.imshow(res1, 'gray'), plt.title('Fourier Image')
plt.axis('off')
plt.subplot(133), plt.imshow(res2, 'gray'), plt.title('Inverse Fourier Image')
plt.axis('off')
plt.show()
def fft_numpy(img):
"""
用numpy对图像进行傅里叶变换
"""
# 傅里叶变换
f = np.fft.fft2(img)
fshift = np.fft.fftshift(f)
res = np.log(np.abs(fshift))
# 傅里叶逆变换
ishift = np.fft.ifftshift(fshift)
iimg = np.fft.ifft2(ishift)
iimg = np.abs(iimg)
# 展示结果
plt.subplot(131), plt.imshow(img, 'gray'), plt.title('Original Image')
plt.axis('off')
plt.subplot(132), plt.imshow(res, 'gray'), plt.title('Fourier Image')
plt.axis('off')
plt.subplot(133), plt.imshow(iimg, 'gray'), plt.title('Inverse Fourier Image')
plt.axis('off')
plt.show()
if __name__ == '__main__':
# 读取图像
img = cv2.imread('LENA256.BMP', 0) # 读取灰度图
fft_numpy(img) # 使用numpy进行变换
# fft_cv(img) # 使用cv进行变化
Lena标准测试图: https://pan.baidu.com/s/1FGAYFsNaPR7XuKbL6aTnhQ 密码: m19a
--来自百度网盘超级会员V5的分享
结果:
3、如何分析频谱图,知识点总结:
参考以下博客:

我的总结:
1.图2是转换到频域二维可视化的结果,称作频谱图
2.由于频谱动态范围很大,所以用log变换降低频谱的动态范围
3.图1为空域:f(x, y) , 图2为频域:H(u, v),中心化之后的结果,频谱图的正中心点为H(0,0),图像大小与原图相同
4.图1和图2相同位置的点没啥直接的对应关系,右边的每一个点可以理解为所描述的是一种平面波,它是构成左边图无数个波面中的一个,它与左边的每一个点都相关
一个曲面可以有很多个正弦平面波组成,二维正弦平面波,可以用以下4个参数来描述它:频率、幅度、相位、方向
所有波都可以用多个正弦波叠加;波又可以通过频率、幅值和方向来表示(频谱图中相位信息被舍弃)
5.图2中的每一个点:
它到中点的距离描述的是频率
中点到它的方向是构成平面波的方向
那一点的灰度值描述的是它的幅值
6.频谱图里面描述的信息有:频率f,振幅A,方向n
7.每一个频谱图中的点它不是实数,是一个虚数,a+bi,为二维可视化,计算的是它的绝对值
8.点点越亮代表这个数值越大,点点越暗代表这个数值越小(幅值的大小)
2021年11月02日16:35:09===========================带通/带阻滤波器===========================
带通/带阻滤波器
如下图所示,左图是被周期性正弦噪声所污染的图像,右图是去噪后的结果,想要在空域去除这样的噪声是很困难的,但是在频域上确能很轻松的进行操作。

带阻滤波器可以移除图像中特定的频率范围,从而很轻松的去除周期性噪声。
简单解释带阻滤波器以及带通滤波器:
- 带阻滤波器:带阻,阻就是阻止,阻止特定的频率范围通过
- 带通滤波器:带通,通就是通过,只允许特定的频率范围通过
由上简单的定义可知,带阻滤波器和带通滤波器可以相互转换,是一种互补的关系,带阻滤波器取反就是带通滤波器,带通滤波器取反就是带阻滤波器。
理想的带阻滤波器定义如下:
H
(
u
,
v
)
=
{
1
if
D
(
u
,
v
)
<
D
0
−
W
2
0
if
D
0
−
W
2
≤
D
(
u
,
v
)
≤
D
0
+
W
2
1
if
D
(
u
,
v
)
>
D
0
+
W
2
H(u, v)=\left\{\begin{array}{ll} 1 & \text { if } D(u, v)<D_{0}-\frac{W}{2} \\ 0 & \text { if } D_{0}-\frac{W}{2} \leq D(u, v) \leq D_{0}+\frac{W}{2} \\ 1 & \text { if } D(u, v)>D_{0}+\frac{W}{2} \end{array}\right.
H(u,v)=⎩
⎨
⎧101 if D(u,v)<D0−2W if D0−2W≤D(u,v)≤D0+2W if D(u,v)>D0+2W
【参考博客】:数字图像处理与python实现-带通滤波器
带阻滤波器,如下图3(第二排第一个),理想的带阻滤波器的定义如上,D(u,v)为频域中任意一点到中心点的距离,D0代表带阻滤波器的半径(从中心到带阻滤波器第一个内圈和第一个外圈之间的中间位置),W代表带阻滤波器的带宽(内圈到外圈的距离),上述公式代表的就是带阻滤波器,含义就是带阻滤波器带宽范围内的部分:不允许它通过,带阻滤波器带宽范围外的地方保持不变,可视化的结果如下图3。

图像从上到下,从左到右分别表示图1:周期性正弦噪声污染的图像;图2:图1转换的频域的结果;图3:理想带阻滤波器;图4:在频域去除周期性噪声后转换到空域的结果
如何使用带阻滤波器
- 将图像1转换到频域,如图2,图1周期性正弦噪声在频域可视化的结果,表现在图2上就是围绕中心一圈分布均匀亮亮的8个小点点
- 去掉周期性噪声,就是去掉这些小点点
- 设计合适的带阻滤波器,如图3,黑色部分设为0,白色部分设为1,与图2的大小相同,两幅图像进行哈达玛积(对应点相乘)->得到结果(带阻滤波器带宽上的点都被置为0了,周期性噪声点在带宽内也被置为0,消除掉了)
- 然后将第三步去噪后的结果,通过IFFT反快速傅里叶变换还原到空域,得到最终结果图4



















 866
866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











