






第4周学习:MobileNet+HybridSN
一、MobileNet
该网络的主要亮点为,Depthwise Convolution(DW卷积),能大大减少参数和运算量;
增加两个参数一个是卷积层卷积核个数的超参数alpha,一个是控制输入图像大小的beta。专注于轻量级CNN网络,在准确率小幅下降的前提下,大大减少模型参数量和运算量。
- mobileNet.V1
DW卷积,一个卷积核对应一个通道,所得到的out_channel==in_channel。在实际代码编写中,用group来表示,若group=1则表示普通卷积,若group=in_channel则表示DW卷积,若group=x则表示分组卷积。
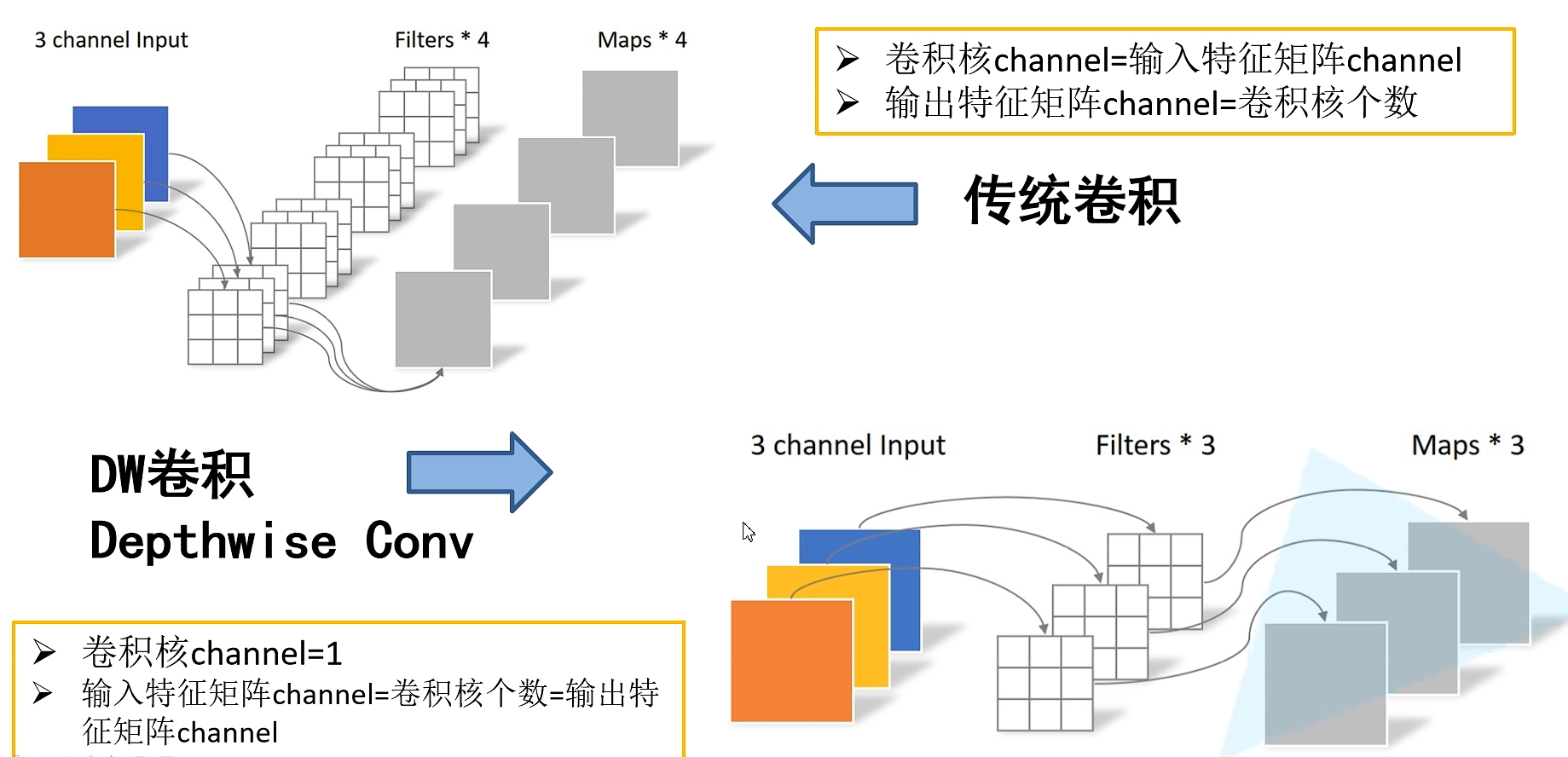
深度可分的卷积操作(depthwise separable Conv)由两部分组成,一个是DW卷积,一个是PW卷积(1x1卷积),将DW+PW运算量和普通卷积的运算量对比,理论上普通卷积计算量是深度可分卷积的8-9倍。网络计算量公式:K x K x inchannel x outchannel x input xinput。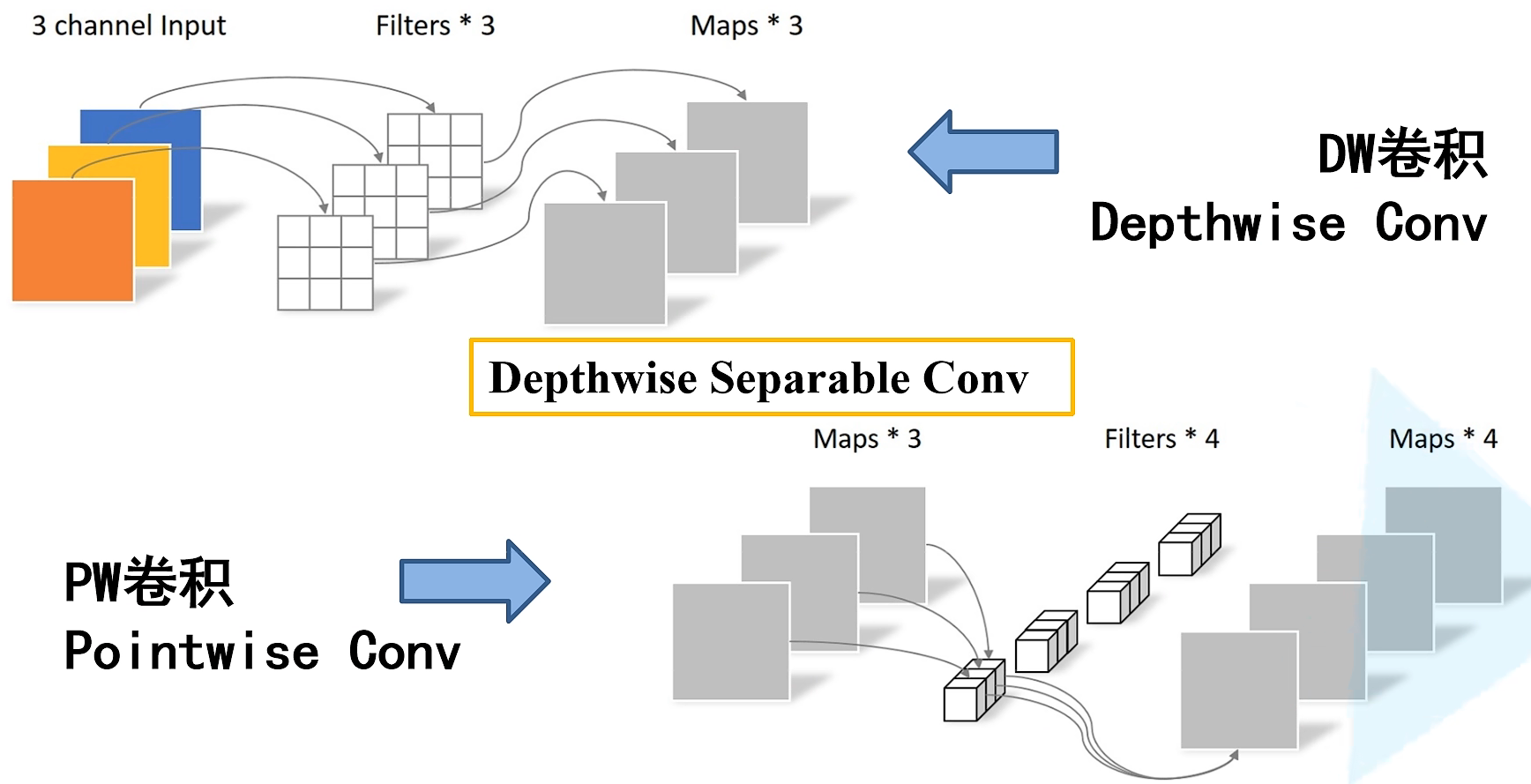
上述alpha与beta,alpha卷积核减少可以这么理解,因为好多卷积核并没有学到东西,所以卷积核深度没必要这么深;beta图像尺寸对准确率的影响。 - mobileNet.V2
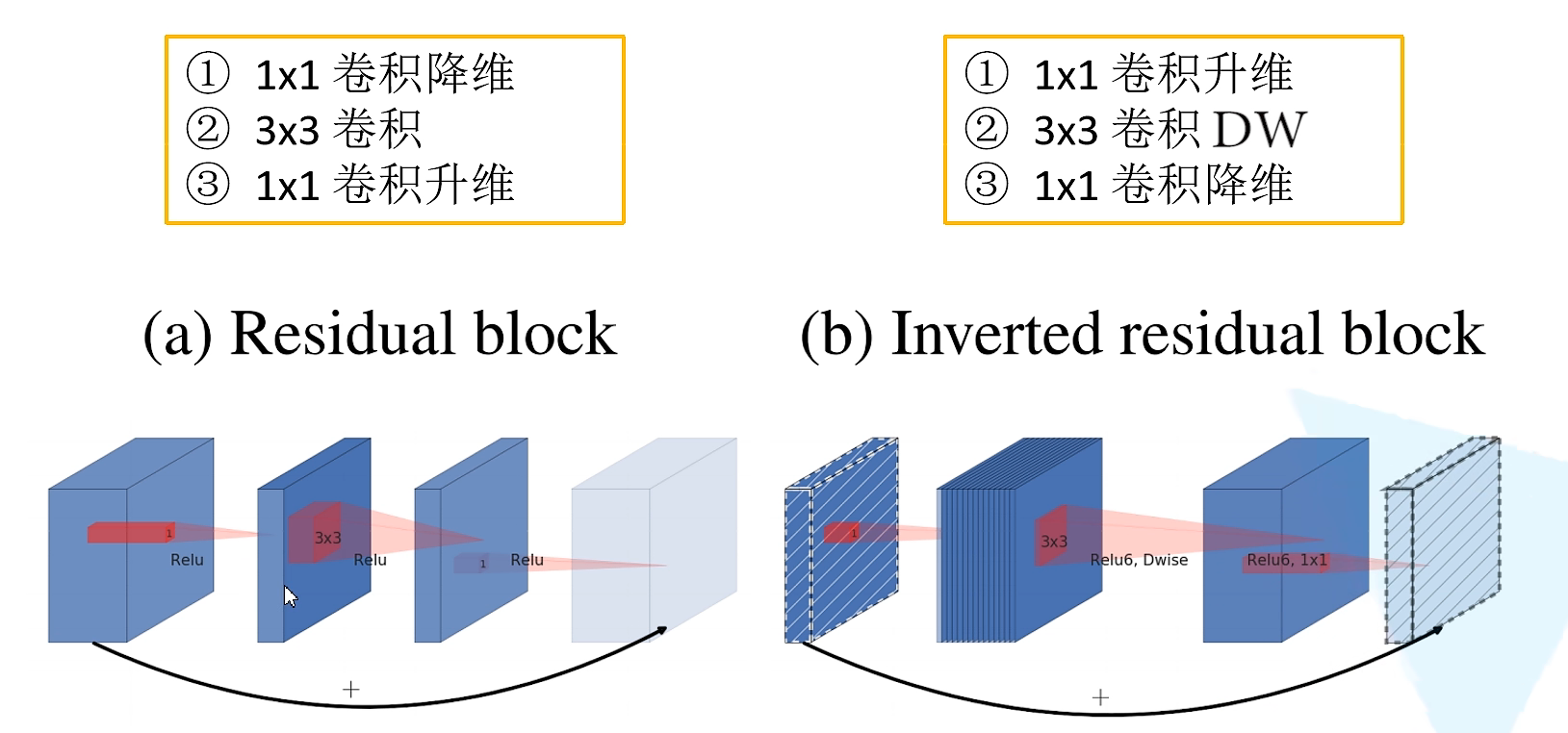
相较于V1版本,V2又加入了倒残差结构(inverted residual block),以及relu6激活函数。
首先我们看Inverted residual,DW卷积本身会造成信息损失,升维后再进行DW卷积可以减少信息损失,主要就是先升维再降维,激活函数的使用变为relu6。并且倒残差结构的最后一个1x1的卷积层使用的是线性激活函数,因为relu激活函数对低维特征信息会造成大量损失。最后要注意,当stride=1(说明卷积后尺寸不变) 且 输入与输出特征矩阵shape相同时才有shortcut连接。

以下为具体的网络结构,并使用该结构进行分类预测。
注意,这里的s指的是每一层block第一个bottleneck的步距,其他默认为1。t指的是bottleneck中间升维的倍数expand_ratio。往往t=1那一层可以省略不写,因为使用的是1x1卷积核且只有深度发生了变化,影响不大。
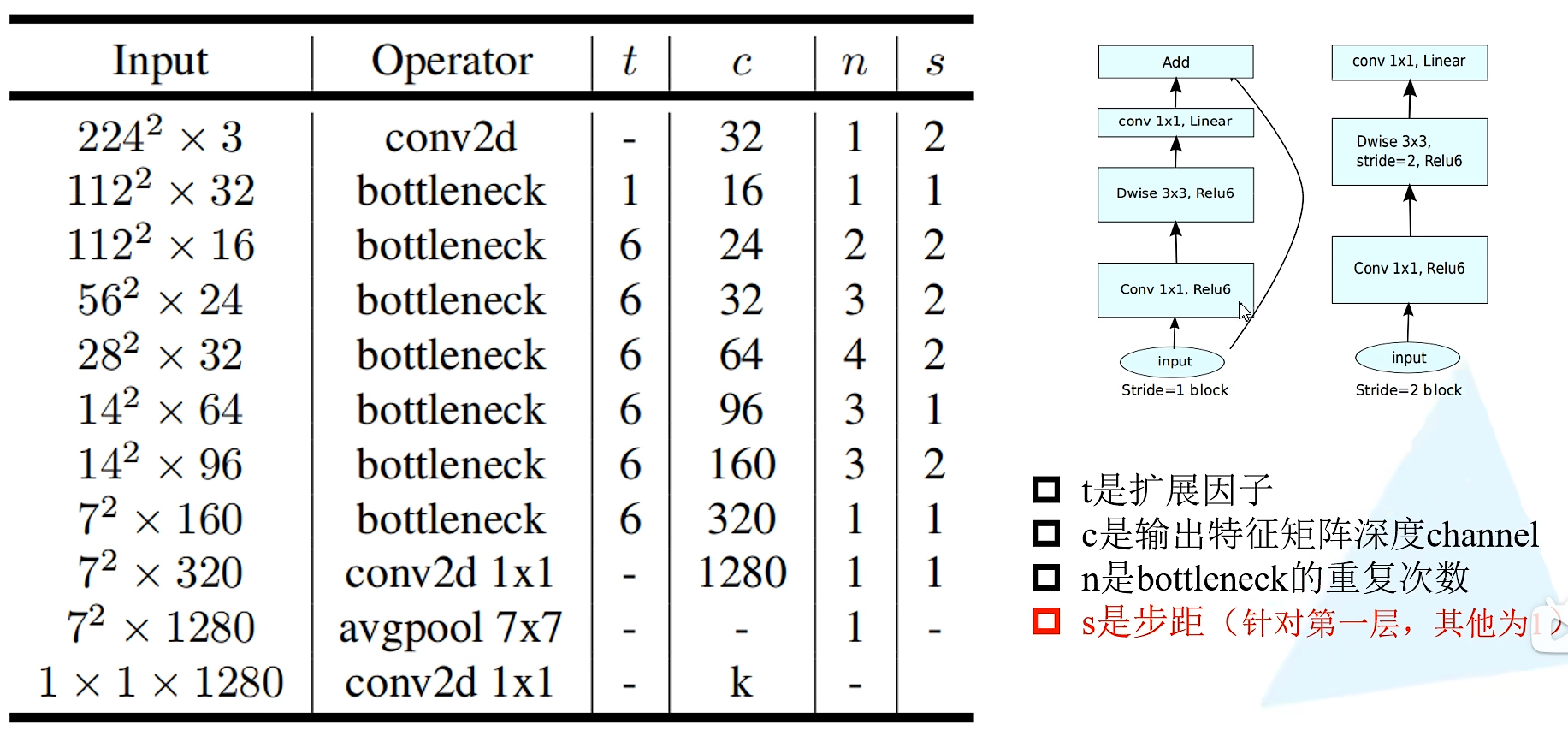
附学习的v2网络结构,预训练模型下载地址:https://download.pytorch.org/models/mobilenet_v2-b0353104.pth
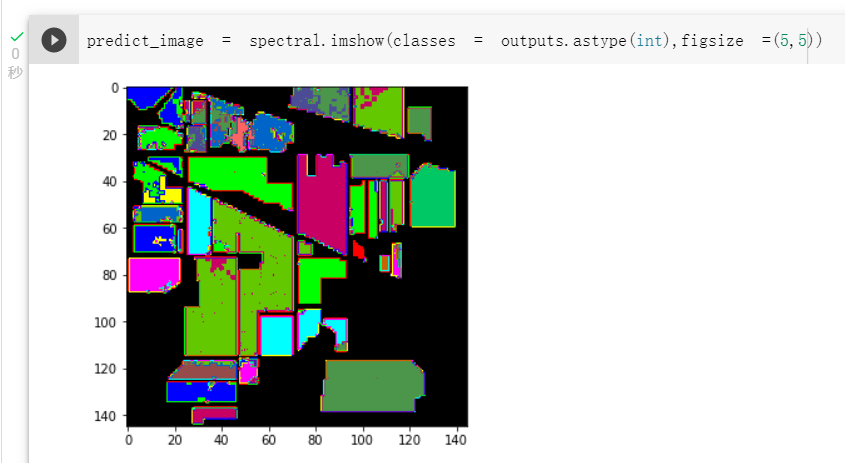
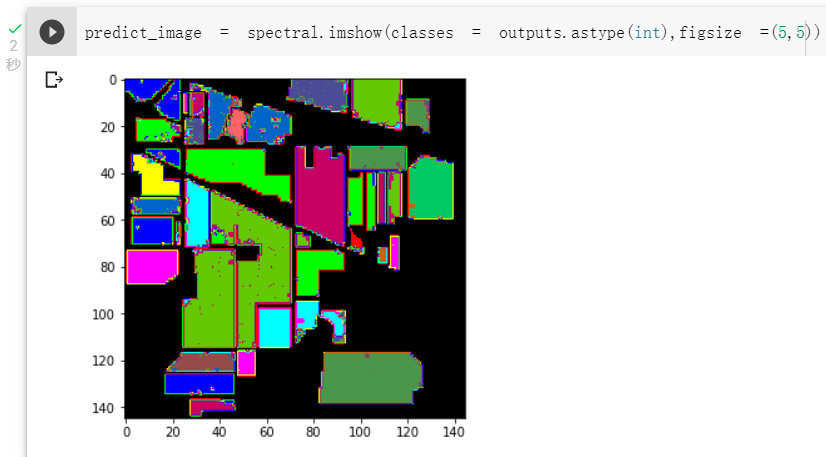
迭代5个epoch后的predict

from torch import nn
import torch
import torchvision.models.mobilenetv2
def _make_divisible(ch, divisor=8, min_ch=None):
"""
This function is taken from the original tf repo.
It ensures that all layers have a channel number that is divisible by 8
It can be seen here:
https://github.com/tensorflow/models/blob/master/research/slim/nets/mobilenet/mobilenet.py
"""
if min_ch is None:
min_ch = divisor
new_ch = max(min_ch, int(ch + divisor / 2) // divisor * divisor)
# Make sure that round down does not go down by more than 10%.
if new_ch < 0.9 * ch:
new_ch += divisor
return new_ch
class ConvBNReLU(nn.Sequential):
def __init__(self, in_channel, out_channel, kernel_size=3, stride=1, groups=1):
padding = (kernel_size - 1) // 2
super(ConvBNReLU, self).__init__(
nn.Conv2d(in_channel, out_channel, kernel_size, stride, padding, groups=groups, bias=False),
nn.BatchNorm2d(out_channel),
nn.ReLU6(inplace=True)
)
class InvertedResidual(nn.Module):
def __init__(self, in_channel, out_channel, stride, expand_ratio):
super(InvertedResidual, self).__init__()
hidden_channel = in_channel * expand_ratio
self.use_shortcut = stride == 1 and in_channel == out_channel
layers = []
if expand_ratio != 1:
# 1x1 pointwise conv
layers.append(ConvBNReLU(in_channel, hidden_channel, kernel_size=1))
layers.extend([
# 3x3 depthwise conv
ConvBNReLU(hidden_channel, hidden_channel, stride=stride, groups=hidden_channel),
# 1x1 pointwise conv(linear)
nn.Conv2d(hidden_channel, out_channel, kernel_size=1, bias=False),
nn.BatchNorm2d(out_channel),
])
self.conv = nn.Sequential(*layers)
def forward(self, x):
if self.use_shortcut:
return x + self.conv(x)
else:
return self.conv(x)
class MobileNetV2(nn.Module):
def __init__(self, num_classes=1000, alpha=1.0, round_nearest=8):
super(MobileNetV2, self).__init__()
block = InvertedResidual
input_channel = _make_divisible(32 * alpha, round_nearest)
last_channel = _make_divisible(1280 * alpha, round_nearest)
inverted_residual_setting = [
# t, c, n, s
[1, 16, 1, 1],
[6, 24, 2, 2],
[6, 32, 3, 2],
[6, 64, 4, 2],
[6, 96, 3, 1],
[6, 160, 3, 2],
[6, 320, 1, 1],
]
features = []
# conv1 layer
features.append(ConvBNReLU(3, input_channel, stride=2))
# building inverted residual residual blockes
for t, c, n, s in inverted_residual_setting:
output_channel = _make_divisible(c * alpha, round_nearest)
for i in range(n):
stride = s if i == 0 else 1 #每一层block第一个bottleneck的步距,其他默认为1
features.append(block(input_channel, output_channel, stride, expand_ratio=t))
input_channel = output_channel
# building last several layers
features.append(ConvBNReLU(input_channel, last_channel, 1))
# combine feature layers
self.features = nn.Sequential(*features)
# building classifier
self.avgpool = nn.AdaptiveAvgPool2d((1, 1))
self.classifier = nn.Sequential(
nn.Dropout(0.2),
nn.Linear(last_channel, num_classes)
)
# weight initialization
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode='fan_out')
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.BatchNorm2d):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.zeros_(m.bias)
def forward(self, x):
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
- mobileNet.V3
相较于V2版本,主要是加入了注意力机制。并且重新设计了激活函数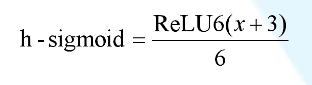 ,优化了量化过程。
,优化了量化过程。
二、SE通道注意力机制
Squeeze-and-Excitation Networks ,从特征通道的层面去考虑提升网络性能。
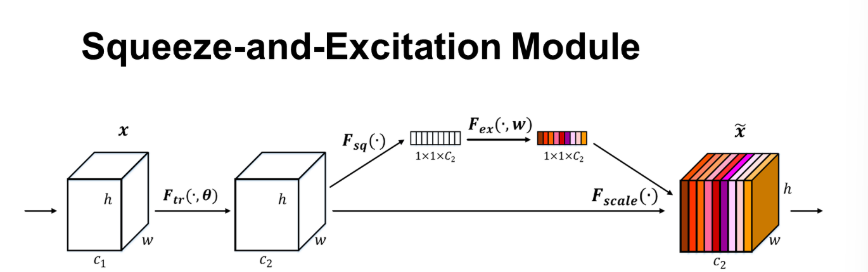
首先是Squeeze操作,为上图所示小白色矩形,将每个二维的特征通道变成一个实数,这个实数某种程度上具有全局的感受野,并且输出的维度和输入的特征通道数相匹配。
# Squeeze 操作:global average pooling
w = F.avg_pool2d(out, out.size(2))
其次是Excitation 操作。
# 在 excitation 的两个全连接
self.fc1 = nn.Conv2d(out_channels, out_channels//16, kernel_size=1)
self.fc2 = nn.Conv2d(out_channels//16, out_channels, kernel_size=1)
#定义foward时
# Excitation 操作: fc(压缩到16分之一)--Relu--fc(激到之前维度)--Sigmoid(保证输出为 0 至 1 之间)
w = F.relu(self.fc1(w))
w = F.sigmoid(self.fc2(w))
最后是一个Reweight的操作,我们将Excitation的输出的权重看做是进过特征选择后的每个特征通道的重要性,然后通过乘法逐通道加权到先前的特征上,完成在通道维度上的对原始特征的重标定。
# 重标定操作: 将卷积后的feature map与 w 相乘
out = out * w
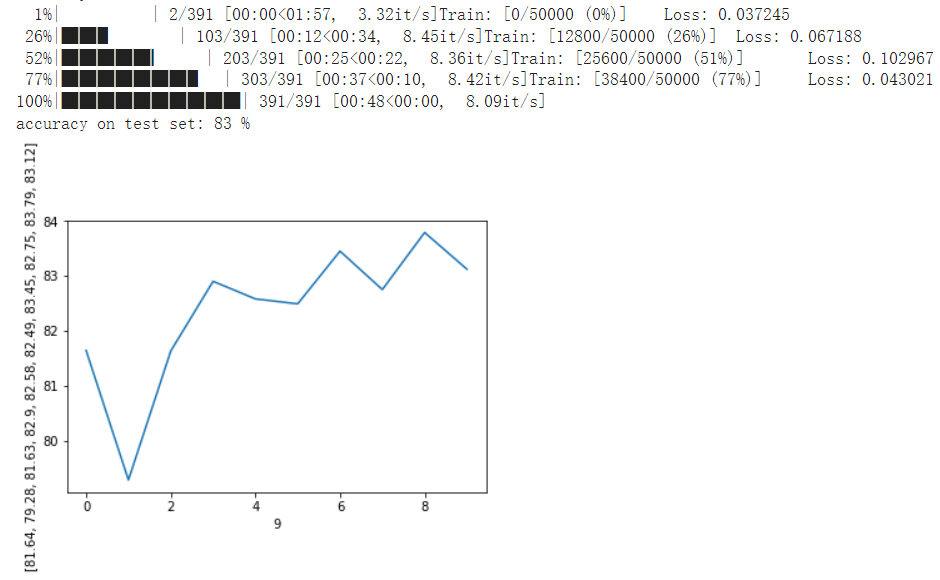
使用resnet18进行CIFAR10的分类预测,测试结果对比如下
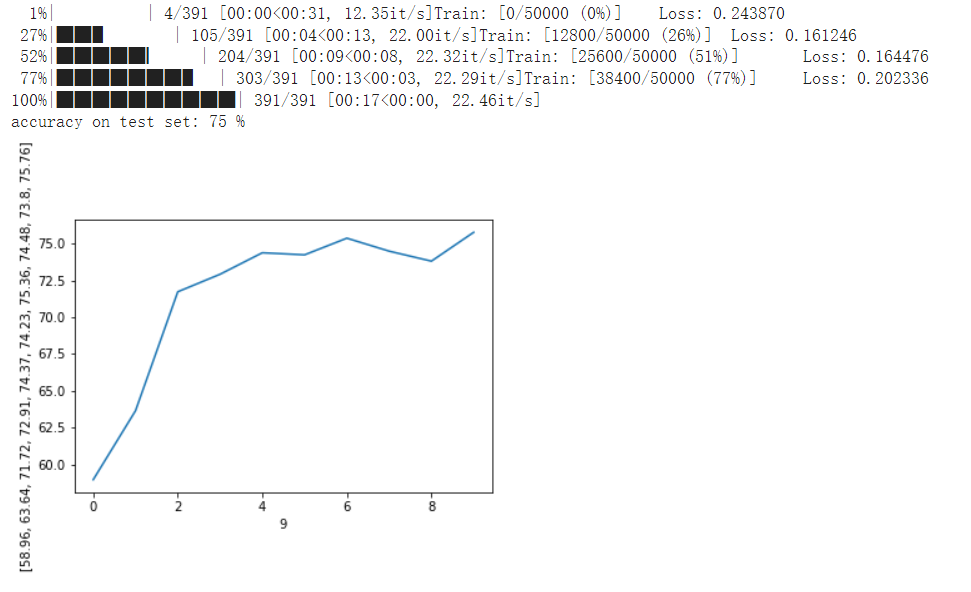
加入SE模块后的效果,可以看到有明显的效果提升。
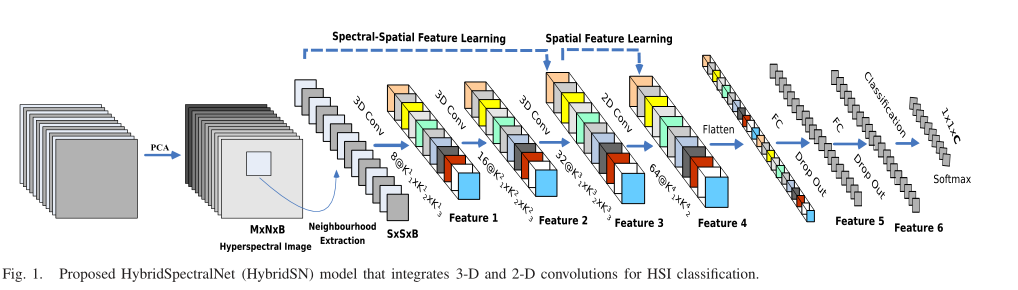
三、HybridSN
- 论文学习
高光谱图像(HyperSpectral Image,简称HSI)
- 即包含光谱信息特别长的图像(包含红外线、紫外线等不可见光光谱),比如:普通照片只有三个通道,即RGB——红、绿、蓝。数据类型是一个m ∗ n ∗ 3的矩阵,而高光谱图像则是M ∗ N ∗ B (B是光谱的层数:3层RGB+其他光谱层…)。
- 高光谱图像是一个立体的三维结构,x、y表示二维平面像素信息坐标轴,第三维是波长信息坐标轴。
仅二维CNN无法从光谱维度中提取出具有良好鉴别能力的特征图。类似地,深度3D-CNN的计算更复杂,仅此一项似乎对在许多光谱带上具有类似纹理的类的性能更差。
因此作者提出构建一种混合网络(HybridSN)解决了HSI分类所遇到的问题,它首先用三维CNN提取空间-光谱的特征,然后在三维CNN基础上进一步使用二维CNN学习更多抽象层次的空间特征,这与单独使用三维CNN相比,混合的CNN模型既降低了复杂性,也提升了性能。 - HybridSN模型
- HybridSN中可训练的权重参数总数为5122176,所有参数都是随机初始化的,使用Adam优化器,交叉熵损失函数,学习率为0.001,batch大小为256,训练100个epoch,抽取10%作为训练样本。结果还表明,所用的25×25空间维数最适合该方法。
- 为了首先消除谱冗余,传统的主成分分析(PCA)应用于原始HSI数据。主成分分析将光谱带的数量从D减少到B,同时保持相同的空间维度(即宽度M和高度N)。只减少了光谱带,从而保留了对识别任何物体都非常重要的空间信息。PCA大致原理讲解链接。
三维卷积部分:
conv1:(1, 30, 25, 25), 8个 7x3x3 的卷积核 ==>(8, 24, 23, 23)
conv2:(8, 24, 23, 23), 16个 5x3x3 的卷积核 ==>(16, 20, 21, 21)
conv3:(16, 20, 21, 21),32个 3x3x3 的卷积核 ==>(32, 18, 19, 19)
接下来要进行二维卷积,因此把前面的 32*18 reshape 一下,得到 (576, 19, 19)
二维卷积:(576, 19, 19) 64个 3x3 的卷积核,得到 (64, 17, 17)
接下来是一个 flatten 操作,变为 18496 维的向量,
接下来依次为256,128节点的全连接层,都使用比例为0.4的 Dropout,
最后输出为 16 个节点,是最终的分类类别数。

- 网络实现
下面是 HybridSN 类的代码:
class_num = 16
class HybridSN(nn.Module):
def __init__(self):
super(HybridSN,self).__init__()
#根据论文计算,stride=1,padding=0
self.conv1=nn.Conv3d(1,8,kernel_size=(7,3,3),stride=1,padding=0)
#self.bn1=nn.BatchNorm3d(8)
self.conv2=nn.Conv3d(8,16,kernel_size=(5,3,3),stride=1,padding=0)
#self.bn2=nn.BatchNorm3d(16)
self.conv3=nn.Conv3d(16,32,kernel_size=(3,3,3),stride=1,padding=0)
#self.bn3=nn.BatchNorm3d(32)
self.conv2D =nn.Conv2d(576,64,kernel_size=(3,3),stride=1,padding=0)
#self.bn4=nn.BatchNorm3d(64)
self.fc1=nn.Linear(18496,256)
self.fc2=nn.Linear(256,128)
self.fc3=nn.Linear(128,class_num)
self.dropout=nn.Dropout(p=0.4)
self.relu=nn.ReLU()
#加入注意力机制,在 excitation 的两个全连接
# self.SE=nn.Sequential(
# nn.Conv2d(576, 576//16, kernel_size=1),
# nn.ReLU(inplace=True),
# nn.Conv2d(576//16, 576, kernel_size=1),
# nn.Sigmoid()
# )
#self.soft = nn.LogSoftmax(dim=1) 能够解决函数overflow和underflow,加快运算速度,提高数据稳定性
def forward(self,x):
out = self.relu(self.conv1(x))
out = self.relu(self.conv2(out))
out = self.relu(self.conv3(out))
#print("shape:",out.shape)
#torch.Size([1, 32, 18, 19, 19])
out = out.view(-1,out.shape[1]*out.shape[2],out.shape[3],out.shape[4])
# w = F.avg_pool2d(out, out.size(2))
# # Excitation 操作: fc(压缩到16分之一)--Relu--fc(激到之前维度)--Sigmoid(保证输出为 0 至 1 之间)
# w = self.SE(out)
# # 重标定操作: 将卷积后的feature map与 w 相乘,相当于恢复原尺寸
# out = out * w
out = self.relu(self.conv2D(out))
out = out.view(out.size(0),-1)
out = self.dropout(self.fc1(out))
out = self.dropout(self.fc2(out))
out = self.fc3(out)
return out
# 随机输入,测试网络结构是否通
x = torch.randn(1, 1, 30, 25, 25)
net = HybridSN()
y = net(x)
print(y.shape)
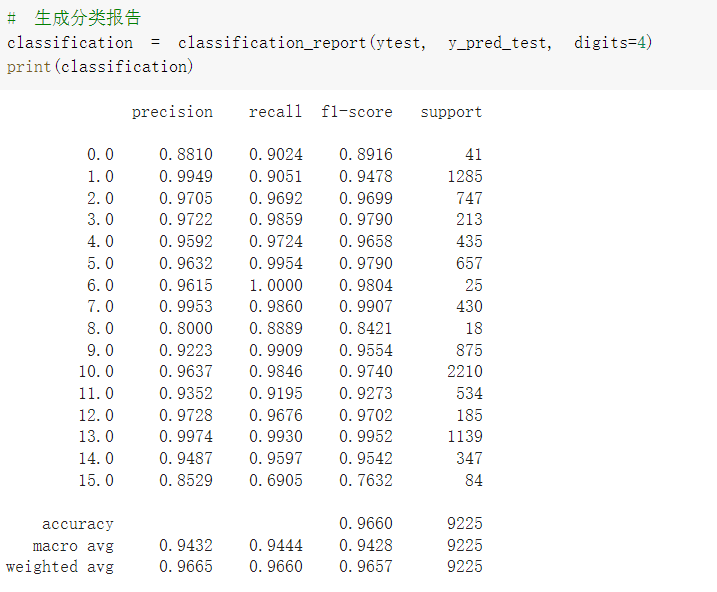
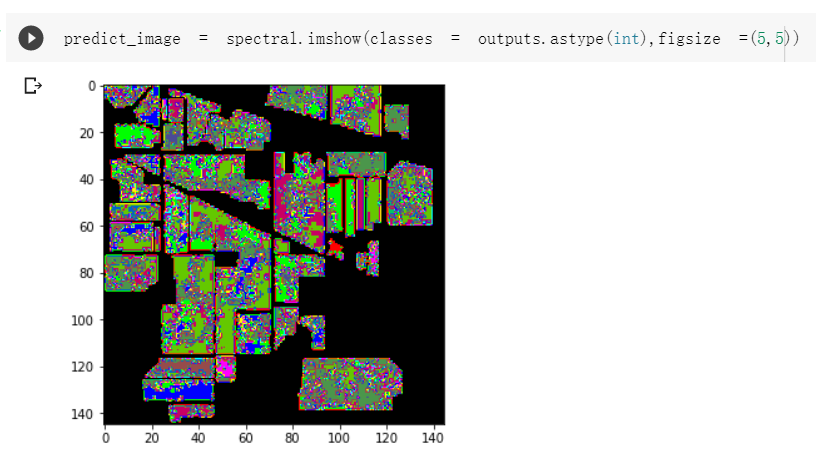
- 效果对比
- 原始网络结构,准确率为96.8%

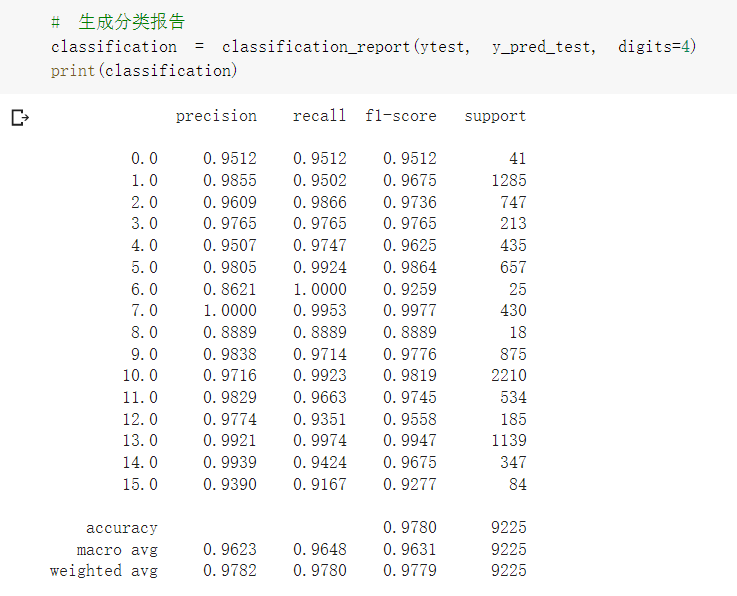
四、思考问题
- 同一结构发现每次分类的结果都不一样,请思考为什么?
所有参数都是随机初始化的。可能是Dropout未关闭,model.eval()只能使得继承了nn.module的dropout失效,而不能使得自定义函数中的未继承module的dropout失效,增加了随机性,提供的源代码中也没有model.eval()和model.train()。 - 如果想要进一步提升高光谱图像的分类性能,可以如何改进?
如上述分类效果所示,在2D卷积之前加入通道注意力模块,准确率有所下降,但视觉效果提升;加入BN层后,从收敛速度上看,HybridSN_BN快于另外两种模型,并且提升了模型分类准确度。















 9268
9268











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









