







Linux 多线程开发:
1、线程概念
与进程(process)类似,线程(thread)是允许应用程序并发执行多个任务的一种机制。一个进程可以包含多个线程。同一个程序中的所有线程均会独立执行相同程序,且共享同一份全局内存区域,其中包括初始化数据段、未初始化数据段,以及堆内存段。(传统意义上的 UNIX 进程只是多线程程序的一个特例,该进程只包含一个线程)
进程是 CPU 分配资源的最小单位,线程是操作系统调度执行的最小单位。
线程是轻量级的进程(LWP:Light Weight Process),在 Linux 环境下线程的本质仍是进程。
查看指定进程的 LWP 号:ps –Lf pid
进程线程区别
1、进程间的信息难以共享。由于除去只读代码段外,父子进程并未共享内存,因此必须采用一些进程间通信方式,在进程间进行信息交换。
调用 fork() 来创建进程的代价相对较高,即便利用写时复制技术,仍然需要复制诸如内存页表和文件描述符表之类的多种进程属性,这意味着 fork() 调用在时间上的开销依然不菲。
2、线程之间能够方便、快速地共享信息。只需将数据复制到共享(全局或堆)变量中即可。
创建线程比创建进程通常要快 10 倍甚至更多。线程间是共享虚拟地址空间的,无需采用写时复制来复制内存,也无需复制页表。
线程之间共享和非共享资源
1、共享资源
- 进程 ID 和父进程 ID
- 进程组 ID 和会话 ID
- 用户 ID 和 用户组 ID
- 文件描述符表
- 信号处置
- 文件系统的相关信息:文件权限掩码(umask)、当前工作目录
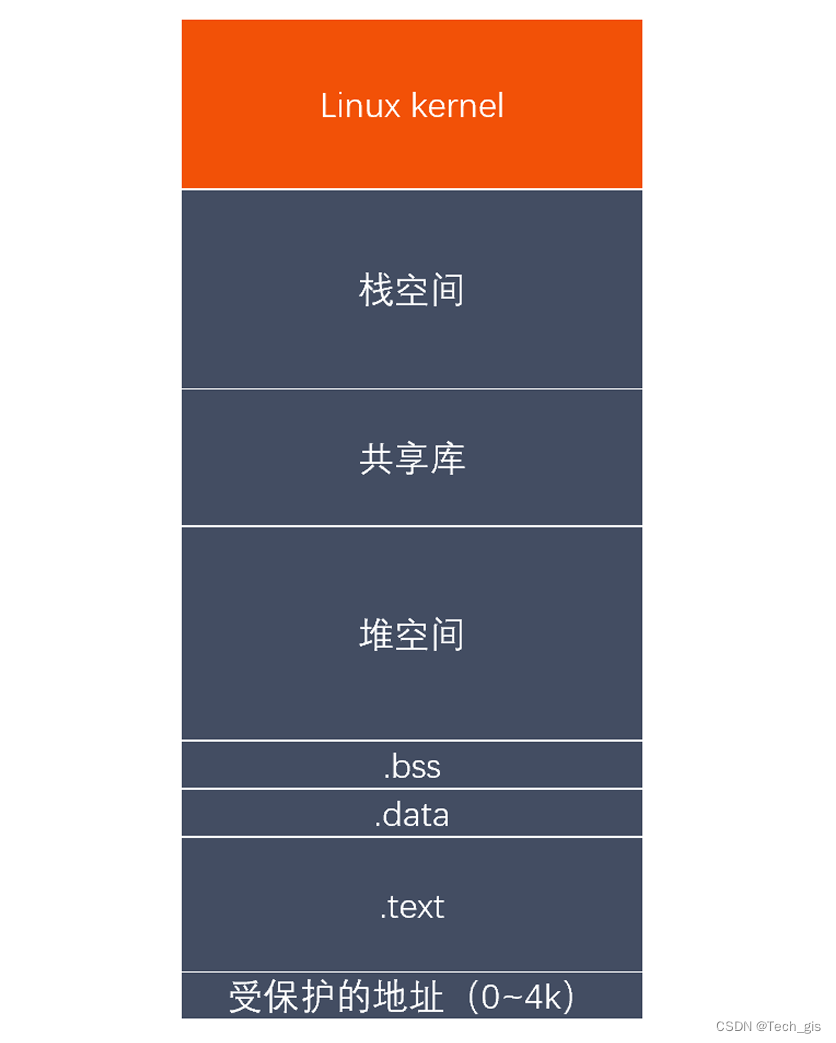
- 虚拟地址空间(除栈、.text)
2、非共享资源
- 线程 ID
- 信号掩码
- 线程特有数据(创建在栈中)
- error 变量 (如果共享会出现线程同步等问题)
- 实时调度策略和优先级
- 栈,本地变量和函数的调用链接信息
NPTL
了解就行:
当 Linux 最初开发时,在内核中并不能真正支持线程。但是它的确可以通过 clone() 系统调用将进程作为可调度的实体。这个调用创建了调用进程(calling process)的一个拷贝,这个拷贝与调用进程共享相同的地址空间。
LinuxThreads 项目使用这个调用来完成在用户空间模拟对线程的支持。不幸的是,这种方法有一些缺点,尤其是在信号处理、调度和进程间同步等方面都存在问题。另外,这个线程模型也不符合 POSIX 的要求。
要改进 LinuxThreads,需要内核的支持,并且重写线程库。有两个相互竞争的项目开始来满足这些要求。一个包括 IBM 的开发人员的团队开展了 NGPT(Next-Generation POSIX Threads)项目。同时,Red Hat 的一些开发人员开展了 NPTL 项目。NGPT 在 2003 年中期被放弃了,把这个领域完全留给了 NPTL。
NPTL,或称为 Native POSIX Thread Library,是 Linux 线程的一个新实现,它克服了 LinuxThreads 的缺点,同时也符合 POSIX 的需求。与 LinuxThreads 相比,它在性能和稳定性方面都提供了重大的改进。
查看当前 pthread 库版本:getconf GNU_LIBPTHREAD_VERSION
2、线程操作函数
typedef unsigned long int pthread_t;
union pthread_attr_t
{
char __size[__SIZEOF_PTHREAD_ATTR_T];
long int __align;
};
int pthread_create(pthread_t *thread, const pthread_attr_t *attr, void * (*start_routine) (void *), void *arg);
pthread_t pthread_self(void);
int pthread_equal(pthread_t t1, pthread_t t2);
void pthread_exit(void *retval);
int pthread_join(pthread_t thread, void **retval);
int pthread_detach(pthread_t thread);
int pthread_cancel(pthread_t thread);
pthread_create() 创建子线程
一般情况下, main函数所在的线程我们称之为主线程(main线程),其余创建的线程称之为子线程。
程序中默认只有一个进程,fork()函数调用,2个进程。
程序中默认只有一个线程,pthread_create()函数调用,2个线程。
#include <pthread.h>
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,
void* (*start_routine) (void*), void *arg);
- 功能:创建一个子线程
- 参数:
- thread:传出参数,线程创建成功后,子线程的线程ID被写到该变量中。
- attr : 设置线程的属性,一般使用默认值,NULL
- start_routine : 函数指针,这个函数是子线程需要处理的逻辑代码。返回值为 void*
- arg : 给第三个参数使用,传参
- 返回值:
成功:0
失败:返回错误号。这个错误号和之前errno不太一样。
获取错误号的信息: char * strerror(int errnum); //char * 保存的是字符串的首地址
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
void * callback(void * arg) { //指针函数
printf("child thread...\n");
printf("arg value: %d\n", *(int *)arg);
return NULL;
}
int main() {
pthread_t tid;
int num = 10;
// 创建一个子线程
int ret = pthread_create(&tid, NULL, callback, (void *)&num);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error : %s\n", errstr);
}
for(int i = 0; i < 5; i++) {
printf("%d\n", i);
}
sleep(1);
return 0; // exit(0); 退出进程,虚拟地址空间中所有东西都被释放
}
输出:
0
1
2
3
4
child thread...
arg value: 10
pthread_exit() 终止当前线程
#include <pthread.h>
void pthread_exit(void *retval);
功能:终止一个线程,在哪个线程中调用,就表示终止哪个线程
参数:
retval:需要传递一个指针,作为一个返回值,可以在pthread_join()中获取到。
pthread_t pthread_self(void);
功能:获取当前的线程的线程ID
int pthread_equal(pthread_t t1, pthread_t t2);
功能:比较两个线程ID是否相等
不同的操作系统,pthread_t类型的实现不一样,有的是无符号的长整型,有的
是使用结构体去实现的。
#include <stdio.h>
#include <pthread.h>
#include <string.h>
void * callback(void * arg) {
printf("child thread id : %ld\n", pthread_self());
return NULL; // pthread_exit(NULL);
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error : %s\n", errstr);
}
// 主线程
for(int i = 0; i < 5; i++) {
printf("%d\n", i);
}
printf("tid : %ld, main thread id : %ld\n", tid ,pthread_self());
// 让主线程退出,当主线程退出时,不会影响其他正常运行的线程。
pthread_exit(NULL);
printf("main thread exit\n");
return 0; // exit(0);
}
输出:
0
1
2
3
4
tid : 140004078192384, main thread id : 140004078257984
child thread id : 140004078192384
父线程和子线程也是交替运行的。
pthread_join() 连接,对子线程资源进行释放
线程中我们学过使用wait()回收子进程pcd相关资源,子线程运行完毕也需要回收。子进程只能由父进程回收,子线程不一定通过父线程回收,任何线程都可以回收子线程。
多个子线程运行后如果不回收,会产生僵尸线程。
#include <pthread.h>
int pthread_join(pthread_t thread, void **retval);
- 功能:和一个已经终止的线程进行连接
回收子线程的资源
这个函数是阻塞函数(没有子进程去回收 它就会一直阻塞),调用一次只能回收一个子线程
一般在主线程中使用
- 参数:
- thread:需要回收的子线程的ID
- retval: 接收子线程退出时的返回值
- 返回值:
0 : 成功
非0 : 失败,返回的错误号
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
int value = 10;
void * callback(void * arg) {
printf("child thread id : %ld\n", pthread_self());
// sleep(3);
// return NULL;
// int value = 10; // 局部变量
pthread_exit((void *)&value); // return (void *)&value;
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error : %s\n", errstr);
}
// 主线程
for(int i = 0; i < 5; i++) {
printf("%d\n", i);
}
printf("tid : %ld, main thread id : %ld\n", tid ,pthread_self());
// 主线程调用pthread_join()回收子线程的资源
int * thread_retval;
ret = pthread_join(tid, (void **) &thread_retval);//不需要第二个参数就传null,这里传二级指针,指向指针的指针,为了能改变thread_retval的值
if(ret != 0) {
char * errstr = strerror(ret);
printf("error : %s\n", errstr);
}
printf("exit data : %d\n", *thread_retval);
printf("回收子线程资源成功!\n");
// 让主线程退出,当主线程退出时,不会影响其他正常运行的线程。
pthread_exit(NULL);
return 0;
}
输出:
0
1
2
child thread id : 140659380127488
3
4
tid : 140659380127488, main thread id : 140659380193088
exit data : 10
回收子线程资源成功!
pthread_detach() 分离线程
#include <pthread.h>
int pthread_detach(pthread_t thread);
- 功能:分离一个线程。被分离的线程在终止的时候,会 自动 释放资源返回给系统。
1.不能多次分离,会产生不可预料的行为。
2.不能去连接一个已经分离的线程,会报错。 detach后不能join
- 参数:需要分离的线程的ID
- 返回值:
成功:0
失败:返回错误号
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
void * callback(void * arg) {
printf("chid thread id : %ld\n", pthread_self()); // %ld 表示按 long int 格式
return NULL;
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error1 : %s\n", errstr);
}
// 输出主线程和子线程的id
printf("tid : %ld, main thread id : %ld\n", tid, pthread_self());
// 设置子线程分离,子线程分离后,子线程结束时对应的资源就不需要主线程释放
ret = pthread_detach(tid);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error2 : %s\n", errstr);
}
// 设置分离后,对分离的子线程进行连接 pthread_join() 是不被允许的
// ret = pthread_join(tid, NULL);
// if(ret != 0) {
// char * errstr = strerror(ret);
// printf("error3 : %s\n", errstr);
// }
pthread_exit(NULL);
return 0;
}
输出:
chid thread id : 139782448023296
tid : 139782448023296, main thread id : 139782448088896
pthread_cancel() 取消线程,执行到取消点才取消
#include <pthread.h>
int pthread_cancel(pthread_t thread);
- 功能:取消线程(让线程终止)
取消某个线程,可以终止某个线程的运行,
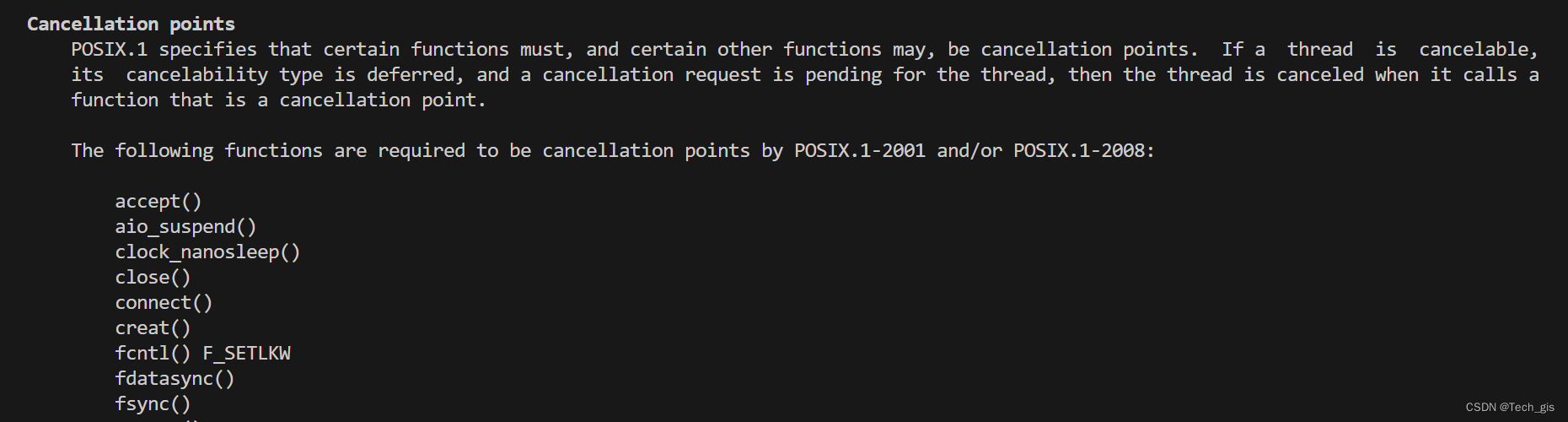
但是并不是立马终止,而是当子线程执行到一个 取消点 cancellation point,线程才会终止。
取消点:系统规定好的一些 系统调用 ,我们可以粗略的理解为从用户区到内核区的切换,这个位置称之为取消点。
控制台输入:man pthreads
可以看到一些需要取消点的函数:
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
void * callback(void * arg) {
printf("chid thread id : %ld\n", pthread_self());
for(int i = 0; i < 5; i++) {
printf("child : %d\n", i); //printf是个取消点
}
return NULL;
}
int main() {
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, NULL, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error1 : %s\n", errstr);
}
// 取消线程
pthread_cancel(tid);
for(int i = 0; i < 5; i++) {
printf("%d\n", i);
}
// 输出主线程和子线程的id
printf("tid : %ld, main thread id : %ld\n", tid, pthread_self());
pthread_exit(NULL);
return 0;
}
输出:
chid thread id : 139747239659264
child : 0
child : 1
child : 2
child : 3
child : 4
0
1
2
3
4
tid : 139747239659264, main thread id : 139747239724864
线程取消后并不是立马终止,而是让子线程执行到一个 取消点 printf 函数后取消的。
如果注释掉 pthread_cancel(tid); 这一行,就会输出:
0
1
2
3
4
tid : 139678272915200, main thread id : 139678272980800
chid thread id : 139678272915200
child : 0
child : 1
child : 2
child : 3
child : 4
线程属性相关函数
线程属性类型 pthread_attr_t
int pthread_attr_init(pthread_attr_t *attr); - 初始化线程属性变量
int pthread_attr_destroy(pthread_attr_t *attr); - 释放线程属性的资源
int pthread_attr_getdetachstate(const pthread_attr_t *attr, int *detachstate); - 获取线程分离的状态属性
int pthread_attr_setdetachstate(pthread_attr_t *attr, int detachstate); - 设置线程分离的状态属性
#include <stdio.h>
#include <pthread.h>
#include <string.h>
#include <unistd.h>
void * callback(void * arg) {
printf("chid thread id : %ld\n", pthread_self());
return NULL;
}
int main() {
// 创建一个线程属性变量
pthread_attr_t attr;
// 初始化属性变量
pthread_attr_init(&attr);
// 设置属性
pthread_attr_setdetachstate(&attr, PTHREAD_CREATE_DETACHED);
// 创建一个子线程
pthread_t tid;
int ret = pthread_create(&tid, &attr, callback, NULL);
if(ret != 0) {
char * errstr = strerror(ret);
printf("error1 : %s\n", errstr);
}
// 获取线程的栈的大小
size_t size;
pthread_attr_getstacksize(&attr, &size);
printf("thread stack size : %ld\n", size);
// 输出主线程和子线程的id
printf("tid : %ld, main thread id : %ld\n", tid, pthread_self());
// 释放线程属性资源
pthread_attr_destroy(&attr);
pthread_exit(NULL);
return 0;
}
输出:
thread stack size : 8388608
tid : 140550371084032, main thread id : 140550371149632
chid thread id : 140550371084032
3、线程同步
使用多线程实现买票的案例。
有3个窗口,一共是100张票。
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 全局变量,所有的线程都共享这一份资源。 一共是100张票
int tickets = 100;
void * sellticket(void * arg) {
// 卖票 (临界区)
while(tickets > 0) {
usleep(6000); //微秒
printf("%ld 正在卖第 %d 张门票\n", pthread_self(), tickets);
tickets--;
}
return NULL;
}
int main() {
// 创建3个子线程
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sellticket, NULL);
pthread_create(&tid2, NULL, sellticket, NULL);
pthread_create(&tid3, NULL, sellticket, NULL);
// 回收子线程的资源,阻塞
// pthread_join(tid1, NULL);
// pthread_join(tid2, NULL);
// pthread_join(tid3, NULL);
// 设置线程分离。
pthread_detach(tid1);
pthread_detach(tid2);
pthread_detach(tid3);
pthread_exit(NULL); // 退出主线程
return 0;
}
140195293955840 正在卖第 100 张门票
140195302409984 正在卖第 100 张门票
140195285501696 正在卖第 100 张门票
140195302409984 正在卖第 97 张门票
140195285501696 正在卖第 97 张门票
140195293955840 正在卖第 97 张门票
140195302409984 正在卖第 94 张门票
140195285501696 正在卖第 94 张门票
140195293955840 正在卖第 94 张门票
140195302409984 正在卖第 91 张门票
140195293955840 正在卖第 90 张门票
140195285501696 正在卖第 90 张门票
140195302409984 正在卖第 88 张门票
发现三个线程会同时卖同一张门票,按理说是每个人都卖不同的票。
因为上一个线程还没有ticket--的时候另一个线程就执行买票操作了,睡眠时间越久 线程数据安全问题 越明显。
简介
线程的主要优势在于,能够通过全局变量来共享信息。不过,这种便捷的共享是有代价的:必须确保多个线程不会同时修改同一变量,或者某一线程不会读取正在由其他线程修改的变量。
临界区是指访问某一共享资源(ticket--)的代码片段,并且这段代码的执行应为原子操作,也就是同时访问同一共享资源的其他线程不应中断该片段的执行。(原子操作,不能分割,对于一个代码,一个线程必须要等另一个线程执行完毕才能进行操作)
线程同步:即当有一个线程在对内存进行操作时,其他线程都不可以对这个内存地址进行操作,直到该线程完成操作,其他线程才能对该内存地址进行操作,而其他线程则处于等待状态。
线程同步会降低并发的效率(串行的),但为了数据的安全性,线程同步是必须的,而且他只需要对 临界区 的数据进行同步,其他部分不同,所以整体来看效率降低不会太大。
互斥量(互斥锁)
解决多线程数据安全问题
为避免线程更新共享变量时出现问题,可以使用互斥量(mutex 是 mutual exclusion的缩写)来确保同时仅有一个线程可以访问某项共享资源。可以使用互斥量来保证对任意共享资源的原子访问。
互斥量有两种状态:已锁定(locked)和未锁定(unlocked)。任何时候,至多只有一个线程可以锁定该互斥量。
试图对已经锁定的某一互斥量再次加锁,将可能阻塞线程或者报错失败,具体取决于加锁时使用的方法。
一旦线程锁定互斥量(就是一个变量),随即成为该互斥量的所有者,只有所有者才能给互斥量解锁。
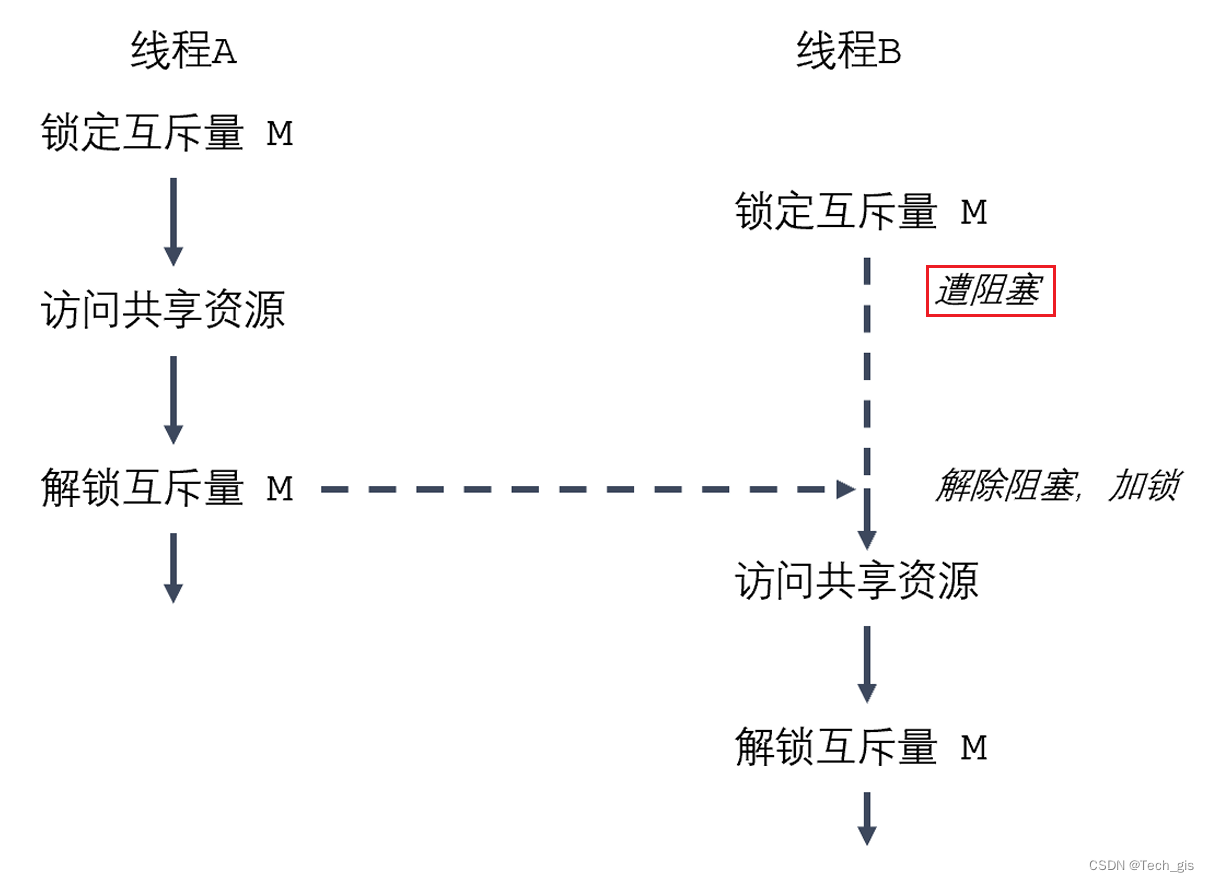
一般情况下,对每一共享资源(可能由多个相关变量组成)会使用不同的互斥量,每一线程在访问同一资源时将采用如下协议:
- 针对共享资源锁定互斥量
- 访问共享资源
- 对互斥量解锁
如果多个线程试图执行这一块代码(一个临界区),事实上只有一个线程能够持有该互斥量(其他线程将遭到阻塞),即同时只有一个线程能够进入这段代码区域,如下图所示:
互斥量相关操作函数:
互斥量的类型 pthread_mutex_t
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
int pthread_mutex_destroy(pthread_mutex_t *mutex);
int pthread_mutex_lock(pthread_mutex_t *mutex);
int pthread_mutex_trylock(pthread_mutex_t *mutex);
int pthread_mutex_unlock(pthread_mutex_t *mutex);
互斥量的类型 pthread_mutex_t
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
- 初始化互斥量
- 参数 :
- mutex : 需要初始化的互斥量变量
- attr : 互斥量相关的属性,NULL
- restrict : C语言的修饰符,被修饰的指针,不能由另外的一个指针进行操作。保证只有mutex可以对共享数据操作
pthread_mutex_t *restrict mutex = xxx;
pthread_mutex_t * mutex1 = mutex; //报错
int pthread_mutex_destroy(pthread_mutex_t *mutex);
- 释放互斥量的资源
int pthread_mutex_lock(pthread_mutex_t *mutex);
- 加锁,阻塞的,如果有一个线程加锁了,那么其他的线程只能阻塞等待
int pthread_mutex_trylock(pthread_mutex_t *mutex);
- 尝试加锁,如果加锁失败,不会阻塞,会直接返回。
int pthread_mutex_unlock(pthread_mutex_t *mutex);
- 解锁
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 全局变量,所有的线程都共享这一份资源。
int tickets = 600;
// 创建一个互斥量
pthread_mutex_t mutex;
void * sellticket(void * arg) {
// 卖票
while(1) {
// 加锁
pthread_mutex_lock(&mutex);
//临界区
if(tickets > 0) {
// usleep(6000);
printf("%ld 正在卖第 %d 张门票\n", pthread_self(), tickets);
tickets--;
}else {
// 解锁
pthread_mutex_unlock(&mutex);
break;
}
// 解锁
pthread_mutex_unlock(&mutex);
}
// 这样写的话 只有一个线程买票
// pthread_mutex_lock(&mutex);
// 临界区
// while(tickets > 0){
// usleep(6000);
// printf("%ld 正在卖第 %d 张门票\n", pthread_self(), tickets);
// tickets--;
// }
// pthread_mutex_unlock(&mutex);
return NULL;
}
int main() {
// 初始化互斥量
pthread_mutex_init(&mutex, NULL);
// 创建3个子线程
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, sellticket, NULL);
pthread_create(&tid2, NULL, sellticket, NULL);
pthread_create(&tid3, NULL, sellticket, NULL);
// 回收子线程的资源,阻塞
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
pthread_exit(NULL); // 退出主线程
// 释放互斥量资源
pthread_mutex_destroy(&mutex);
return 0;
}
输出:
139657194374912 正在卖第 266 张门票
139657194374912 正在卖第 265 张门票
139657194374912 正在卖第 264 张门票
139657177466624 正在卖第 263 张门票
139657177466624 正在卖第 262 张门票
139657177466624 正在卖第 261 张门票
139657177466624 正在卖第 260 张门票
139657177466624 正在卖第 259 张门票
139657177466624 正在卖第 258 张门票
139657177466624 正在卖第 257 张门票
139657177466624 正在卖第 256 张门票
139657194374912 正在卖第 255 张门票
139657194374912 正在卖第 254 张门票
139657177466624 正在卖第 253 张门票
139657177466624 正在卖第 252 张门票
139657177466624 正在卖第 251 张门票
139657177466624 正在卖第 250 张门票
139657177466624 正在卖第 249 张门票
这样就可以交替买票了。临界区只能有一个线程去操作。
死锁
有时,一个线程需要同时访问两个或更多不同的共享资源,而每个资源又都由不同的互斥量管理。
当超过一个线程加锁同一组互斥量时,就有可能发生死锁。
两个或两个以上的进程在执行过程中,因争夺共享资源而造成的一种互相等待的现象,若无外力作用,它们都将无法推进下去。此时称系统处于死锁状态或系统产生了死锁。
面试:
死锁的几种场景:
- 忘记释放锁:执行完第一段临界区代码就直接阻塞了,可以用
pthread_mutex_trylock解决; - 重复加锁:函数A中嵌套一个函数B,在函数A上锁后,又给函数B上锁,导致重复上锁,结果就是什么也不执行卡住;
- 多线程多锁,抢占锁资源 👇 僵持住了,谁也不给谁。
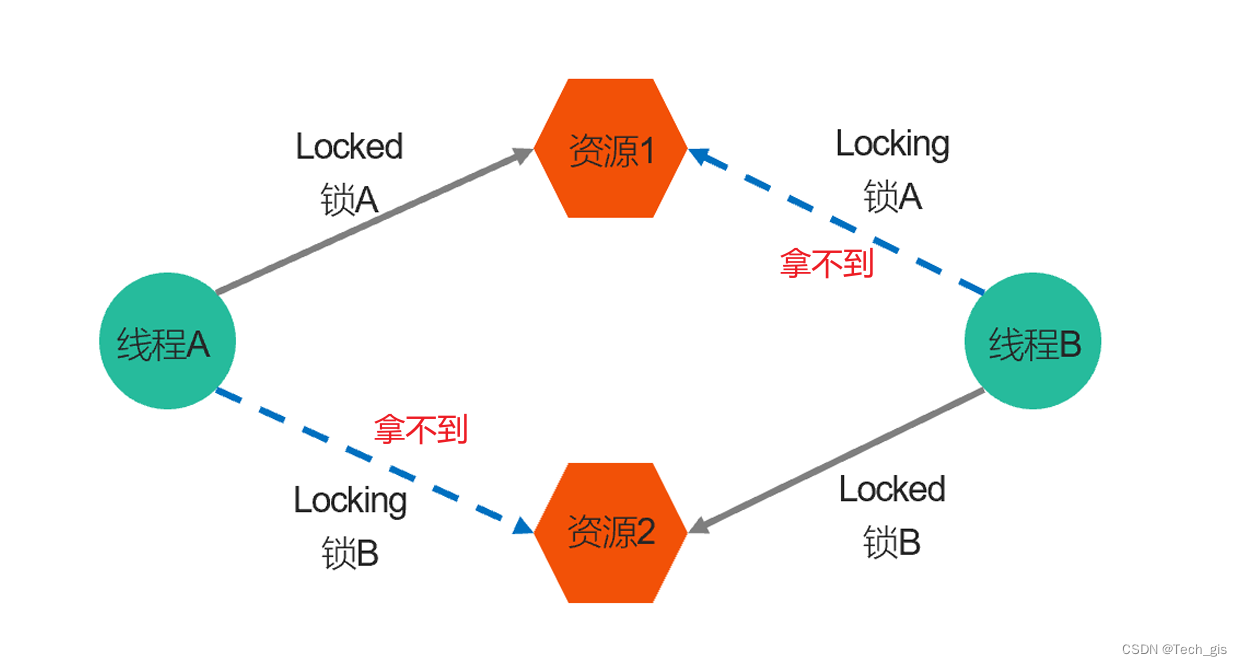
对于第三种情况:多线程多锁。
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 创建2个互斥量
pthread_mutex_t mutex1, mutex2;
void * workA(void * arg) {
//加锁 1 2
pthread_mutex_lock(&mutex1);
sleep(1);
pthread_mutex_lock(&mutex2);
printf("workA....\n");
//解锁 2 1
pthread_mutex_unlock(&mutex2);
pthread_mutex_unlock(&mutex1);
return NULL;
}
void * workB(void * arg) {
//加锁 2 1
pthread_mutex_lock(&mutex2);
sleep(1);
pthread_mutex_lock(&mutex1);
printf("workB....\n");
//解锁 1 2
pthread_mutex_unlock(&mutex1);
pthread_mutex_unlock(&mutex2);
return NULL;
}
int main() {
// 初始化互斥量
pthread_mutex_init(&mutex1, NULL);
pthread_mutex_init(&mutex2, NULL);
// 创建2个子线程
pthread_t tid1, tid2;
pthread_create(&tid1, NULL, workA, NULL);
pthread_create(&tid2, NULL, workB, NULL);
// 回收子线程资源
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
// 释放互斥量资源
pthread_mutex_destroy(&mutex1);
pthread_mutex_destroy(&mutex2);
return 0;
}
输出结果直接卡住,因为线程A锁住了互斥量1,线程B锁住了互斥量2,然后线程A想锁互斥量2锁不了,线程B想锁互斥量1锁不了。
读写锁
当有一个线程已经持有互斥锁时,互斥锁将所有试图进入临界区的线程都阻塞住。
但是考虑一种情形,当前持有互斥锁的线程只是要 读 访问 共享资源,而同时有其它几个线程也想读取这个共享资源,但是由于互斥锁的排它性,所有其它线程都无法获取锁,也就无法读访问共享资源了,但是实际上多个线程同时读访问共享资源并不会导致问题。
在对数据的读写操作中,更多的是读操作,写操作较少,例如对数据库数据的读写应用。为了满足当前能够允许多个读出,但只允许一个写入的需求,线程提供了读写锁来实现。
简单来说:线程同步是为了解决写操作数据安全问题,而实际读操作比较多,但你锁住了,我就没法读了。
读写锁的特点:
- 如果有其它线程读数据,则允许其它线程执行读操作,但不允许写操作。
- 如果有其它线程写数据,则其它线程都不允许读、写操作。
- 写是独占的,写的优先级高。
同一时间只有一个线程写,而可以有多个线程读,写的时候不能读。
读写锁相关函数:
读写锁的类型 pthread_rwlock_t
int pthread_rwlock_init(pthread_rwlock_t *restrict rwlock, const pthread_rwlockattr_t *restrict attr);
int pthread_rwlock_destroy(pthread_rwlock_t *rwlock);
int pthread_rwlock_rdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_tryrdlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_wrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_trywrlock(pthread_rwlock_t *rwlock);
int pthread_rwlock_unlock(pthread_rwlock_t *rwlock);
案例:
8个线程操作同一个全局变量。
3个线程不定时写这个全局变量,5 个线程不定时的读这个全局变量。
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 创建一个共享数据
int num = 1;
// pthread_mutex_t mutex;
pthread_rwlock_t rwlock;
void * writeNum(void * arg) {
while(1) {
// pthread_mutex_lock(&mutex);
pthread_rwlock_wrlock(&rwlock);
num++;
printf("++write, tid : %ld, num : %d\n", pthread_self(), num);
// pthread_mutex_unlock(&mutex);
pthread_rwlock_unlock(&rwlock);
usleep(100);
}
return NULL;
}
void * readNum(void * arg) {
while(1) {
// pthread_mutex_lock(&mutex);
pthread_rwlock_rdlock(&rwlock);
printf("===read, tid : %ld, num : %d\n", pthread_self(), num);
// pthread_mutex_unlock(&mutex);
pthread_rwlock_unlock(&rwlock);
usleep(100);
}
return NULL;
}
int main() {
// pthread_mutex_init(&mutex, NULL);
pthread_rwlock_init(&rwlock, NULL);
// 创建3个写线程,5个读线程
pthread_t wtids[3], rtids[5];
for(int i = 0; i < 3; i++) {
pthread_create(&wtids[i], NULL, writeNum, NULL);
}
for(int i = 0; i < 5; i++) {
pthread_create(&rtids[i], NULL, readNum, NULL);
}
// 设置线程分离
for(int i = 0; i < 3; i++) {
pthread_detach(wtids[i]);
}
for(int i = 0; i < 5; i++) {
pthread_detach(rtids[i]);
}
getchar();
// pthread_mutex_destroy(&mutex);
pthread_rwlock_destroy(&rwlock);
pthread_exit(NULL);
return 0;
}
输出:
===read, tid : 140218356598528, num : 7472
===read, tid : 140218250102528, num : 7472
===read, tid : 140218258556672, num : 7472
===read, tid : 140218348144384, num : 7472
===read, tid : 140218267010816, num : 7472
++write, tid : 140218365052672, num : 7473
++write, tid : 140218381960960, num : 7474
++write, tid : 140218373506816, num : 7475
使用互斥锁来操作,可能会效率低一些,因为读操作是串行的。所以使用读写锁实现并行的读。
4、生产者消费者模型
生产者生产数据,放入仓库,消费者从仓库中消费数据,两者要达到一种平衡。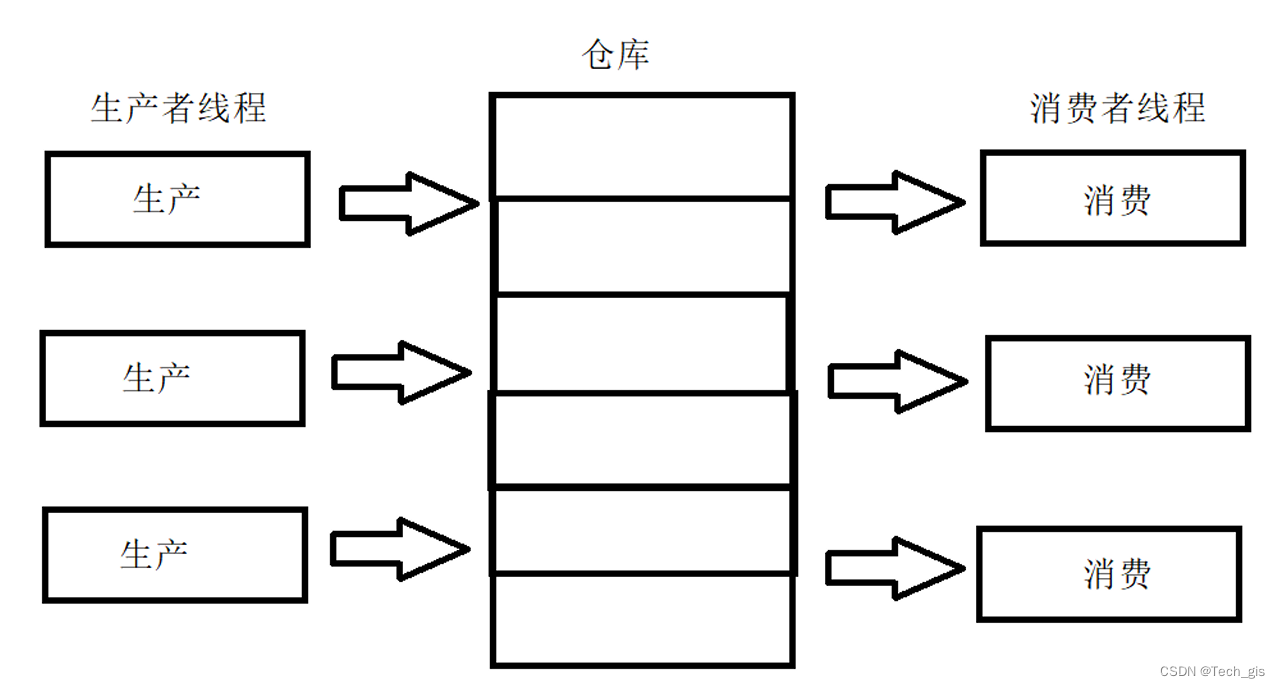
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
// 创建一个互斥量
pthread_mutex_t mutex;
//链表
struct Node{
int num;
struct Node *next;
};
// 头结点
struct Node * head = NULL;
void * producer(void * arg) {
// 不断的创建新的节点,添加到链表中
while(1) {
//加锁
pthread_mutex_lock(&mutex);
//与new相比,malloc需要指定大小,而且还要显式转换返回指针类型,默认是void*
struct Node * newNode = (struct Node *)malloc(sizeof(struct Node));
// 头插法
newNode->next = head;
head = newNode;
newNode->num = rand() % 1000;
printf("add node, num : %d, tid : %ld\n", newNode->num, pthread_self()); // ld long int
//解锁
pthread_mutex_unlock(&mutex);
usleep(100);
}
return NULL;
}
void * customer(void * arg) {
while(1) {
//加锁
pthread_mutex_lock(&mutex);
// 保存头结点的指针
struct Node * tmp = head;
// 判断是否有数据
if(head != NULL) {
// 有数据
//头删法
head = head->next;
printf("del node, num : %d, tid : %ld\n", tmp->num, pthread_self());
free(tmp); //释放malloc创建的数据
pthread_mutex_unlock(&mutex);
usleep(100);
} else { // 防止死锁
// 没有数据 解锁
pthread_mutex_unlock(&mutex);
}
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL);
// 创建5个生产者线程,和5个消费者线程
pthread_t ptids[5], ctids[5];
for(int i = 0; i < 5; i++) {
pthread_create(&ptids[i], NULL, producer, NULL);
pthread_create(&ctids[i], NULL, customer, NULL);
}
//用了join就需要注释detach
// for(int i = 0; i < 5; i++) {
// pthread_detach(ptids[i]);
// pthread_detach(ctids[i]);
// }
// while(1) {
// sleep(10);
// }
// 写个join函数,阻塞,相当于上面的while循环
for(int i = 0; i < 5; i++) {
int * thread_retval;
pthread_join(ptids[i], (void**) &thread_retval);
pthread_join(ctids[i], (void**) &thread_retval);
}
pthread_mutex_destroy(&mutex);
pthread_exit(NULL);
return 0;
}
通过互斥锁,可以实现一边生产数据,一边消费数据,解决了数据安全问题。但是呢,如果生产者一直不生产数据,消费者还在不断地执行是否有数据,如果有就消费代码,会对性能产生一定的问题。所以能否让生产者通知消费者:“我不生产了 ,你别来消费了”。
要实现这样的操作,就要用到 条件变量 了。
条件变量
只要生产了一个,就通知消费者消费
条件变量的类型 pthread_cond_t
int pthread_cond_init(pthread_cond_t *restrict cond, const pthread_condattr_t *restrict attr);
int pthread_cond_destroy(pthread_cond_t *cond);
int pthread_cond_wait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex);
- 等待,调用了该函数,线程会阻塞。
int pthread_cond_timedwait(pthread_cond_t *restrict cond, pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime);
- 等待多长时间,调用了这个函数,线程会阻塞,直到指定的时间结束。
int pthread_cond_signal(pthread_cond_t *cond);
- 唤醒一个或者多个等待的线程 (一个信号,只有几个能收到)
int pthread_cond_broadcast(pthread_cond_t *cond);
- 唤醒所有的等待的线程 (广播,都能听到)
#include <stdio.h>
#include <pthread.h>
#include <stdlib.h>
#include <unistd.h>
// 创建一个互斥量
pthread_mutex_t mutex;
// 创建条件变量
pthread_cond_t cond;
struct Node{
int num;
struct Node *next;
};
// 头结点
struct Node * head = NULL;
void * producer(void * arg) {
// 不断的创建新的节点,添加到链表中
while(1) {
pthread_mutex_lock(&mutex);
struct Node * newNode = (struct Node *)malloc(sizeof(struct Node));
newNode->next = head;
head = newNode;
newNode->num = rand() % 1000;
printf("add node, num : %d, tid : %ld\n", newNode->num, pthread_self());
// 只要生产了一个,就通知消费者消费
pthread_cond_signal(&cond);
pthread_mutex_unlock(&mutex);
usleep(100);
}
return NULL;
}
void * customer(void * arg) {
while(1) {
pthread_mutex_lock(&mutex);
// 保存头结点的指针
struct Node * tmp = head;
// 判断是否有数据
if(head != NULL) {
// 有数据
head = head->next;
printf("del node, num : %d, tid : %ld\n", tmp->num, pthread_self());
free(tmp);
pthread_mutex_unlock(&mutex);
usleep(100);
} else {
// 没有数据,需要等待
// 当这个函数调用阻塞的时候,会对互斥锁进行解锁(让生产者继续生产)。当不阻塞的时候,继续向下执行,会重新加锁(保证数据安全问题)。
pthread_cond_wait(&cond, &mutex);
pthread_mutex_unlock(&mutex);
}
}
return NULL;
}
int main() {
pthread_mutex_init(&mutex, NULL);
pthread_cond_init(&cond, NULL);
// 创建5个生产者线程,和5个消费者线程
pthread_t ptids[5], ctids[5];
for(int i = 0; i < 5; i++) {
pthread_create(&ptids[i], NULL, producer, NULL);
pthread_create(&ctids[i], NULL, customer, NULL);
}
for(int i = 0; i < 5; i++) {
pthread_detach(ptids[i]);
pthread_detach(ctids[i]);
}
while(1) {
sleep(10);
}
pthread_mutex_destroy(&mutex);
pthread_cond_destroy(&cond);
pthread_exit(NULL);
return 0;
}
主要用这连个函数实现条件变量。
pthread_cond_signal(&cond);
pthread_cond_wait(&cond, &mutex);
5、信号量
如果灯都灭了,不能有线程访问资源了。
信号量的类型 sem_t
int sem_init(sem_t *sem, int pshared, unsigned int value);
int sem_destroy(sem_t *sem);
int sem_wait(sem_t *sem);
int sem_trywait(sem_t *sem);
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
int sem_post(sem_t *sem);
int sem_getvalue(sem_t *sem, int *sval);
信号量广泛用于进程或线程间的同步和互斥,信号量本质上是⼀个非负的整数计数器,它被用来控制对公共资源的访问。
信号量不能保证多线程数据安全问题,要与互斥量配合使用。
信号量的类型 sem_t
typedef union
{
char __size[__SIZEOF_SEM_T]; //# define __SIZEOF_SEM_T 32
long int __align;
} sem_t;
int sem_init(sem_t *sem, int pshared, unsigned int value);
- 初始化信号量
- 参数:
- sem : 信号量变量的地址
- pshared : 0 用在线程间 ,非0 用在进程间
- value : 信号量中的值
int sem_destroy(sem_t *sem);
- 释放资源
int sem_wait(sem_t *sem);
- 对信号量加锁,调用一次对信号量的值-1,如果值为0,就阻塞
int sem_trywait(sem_t *sem);
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout);
int sem_post(sem_t *sem);
- 对信号量解锁,调用一次对信号量的值+1
int sem_getvalue(sem_t *sem, int *sval);
sem_t psem;
sem_t csem;
sem_init(psem, 0, 8);
sem_init(csem, 0, 0);
producer() {
sem_wait(&psem); // 8 可以生产,然后-1 = 7
sem_post(&csem) // +1
}
customer() {
sem_wait(&csem); // 原来是0,但生产者生产了一个,所以可以消费1个,1-1 = 0
sem_post(&psem) //我需要一个 +1 = 8
}
















 741
741











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









