







1 知识框架

2 栈
定义:只允许在一端进行插入或删除得到线性表
栈的数学性质:n个不同元素进栈,出栈的不同排列有
2.1 顺序栈
定义:
typedef struct
{
int data[MaxSize];
int top; // 栈顶指针 初始化top = -1,栈顶元素:S.data[top]
}Stack;
1.进栈
bool Push(Stack &s,int x) //为什么用&,这里不用&,传的就是形参,存进来的数据不会改变内存中的栈
{
if(s.top == MaxSize - 1)
return false;
s.data[++ s.top] = x;
return true;
}
2.出栈
bool Pop(Stack &s,int &x)
{
if(s.top == -1)
return false;
x = s.data[top --];
return true;
}
2.2 链式栈

定义:
typedef struct Linknode
{
int data;
struct Linknode *next;
}*Stack;
3 队列
定义:在表的一端进行插入,在表的另一端进行删除的线性表。
3.1 顺序队列
定义:
typedef struct
{
int data[MaxSize];
int front,rear; //初始化 front = rear = 0;
}Queue;
1.进队
bool Push(Queue &s,int x)
{
if(s.rear == MaxSize) //并不是真正的队满,假溢出
return false;
s.data[rear ++] = x;
return true;
}
2.出队
bool Pop(Queue &s,int &x)
{
if(s.front == s.rear)
return false;
x = s.data[front ++];
}
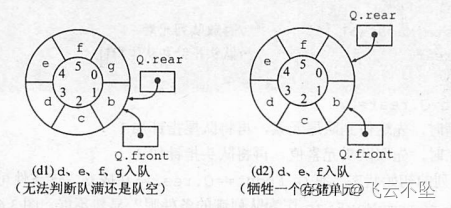
3.2 循环队列
1.初始:Q.front = Q.rear = 0;
2.入队:Q.rear = (Q.rear + 1) % MaxSize;
3.出队:Q.front = (Q.front + 1) % MaxSize;
4.队长:(Q.rear - Q.front + MaxSize) % Maxsize;
5.判空:Q.rear == Q.front;
6.判满:Q.front == (Q.rear + 1) % MaxSize //队列留出一个位置作为队列判满的条件,不然rear == front可以是队空,也可以是队满。
3.3 链式队列
定义:
typedef struct LinkNode
{
int data;
struct LinkNode *next;
}LinkNode; //队列节点
typedef struct
{
LinkNode *front,*rear;
}*LinkQueue; //无名结构体 使用: 别名 变量名 LinkQueue linkQueue;
4 数组
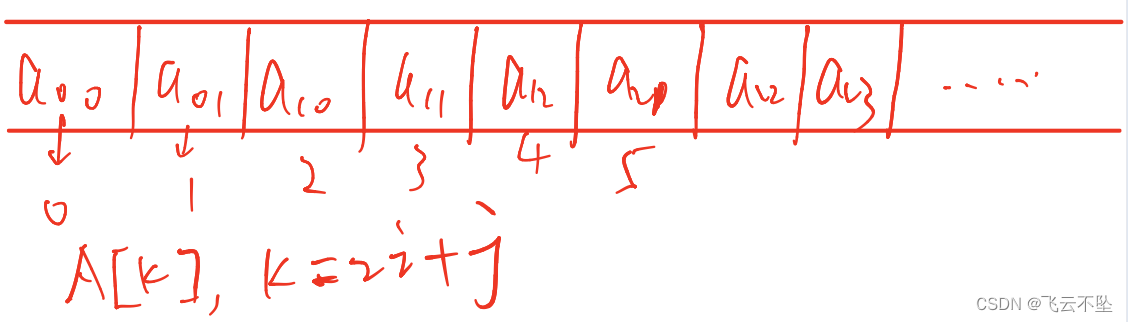
4.1 二维数组
二维数组在内存中的位置的两种映射方式。
1.先行后列
//位置计算方法 L是每个数组元素所占的存储空间大小 int 4个字节
A[2][3]
ADD(A[i][j]) = ADD(A[0][0])+(i * 4 + j) * L;
2.先列后行
//位置计算方法 L是每个数组元素所占的存储空间大小 int 4个字节
A[2][3]
ADD(A[i][j]) = ADD(A[0][0])+(j * 3 + i) * L;
4.2 特殊数组的压缩存储
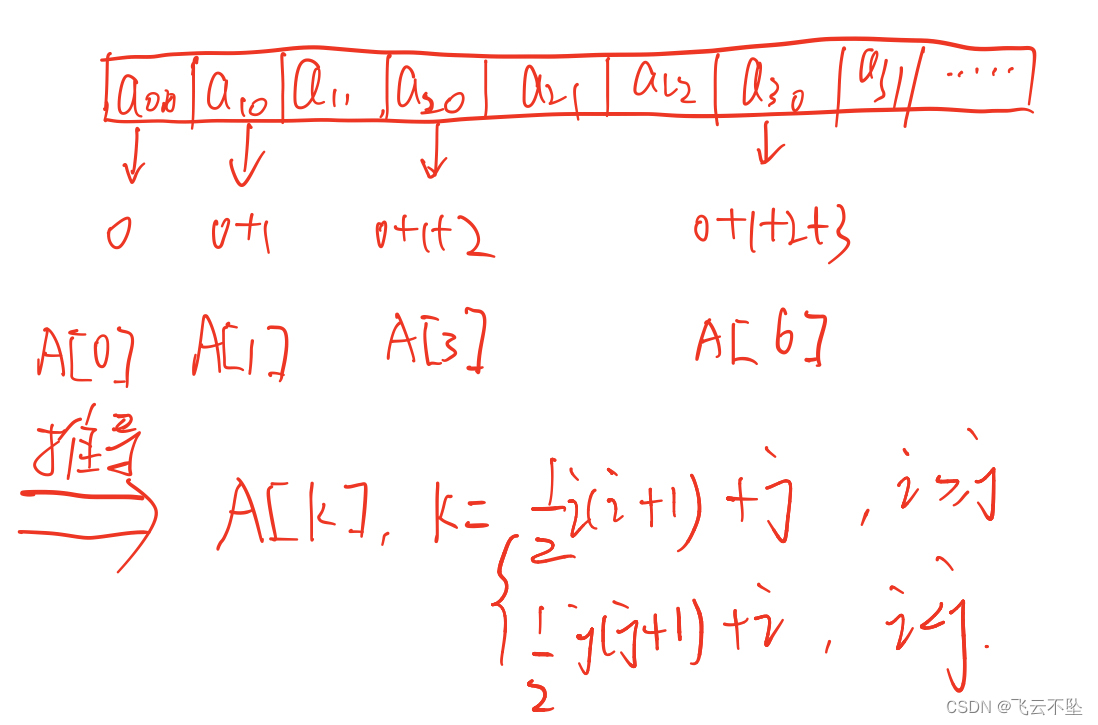
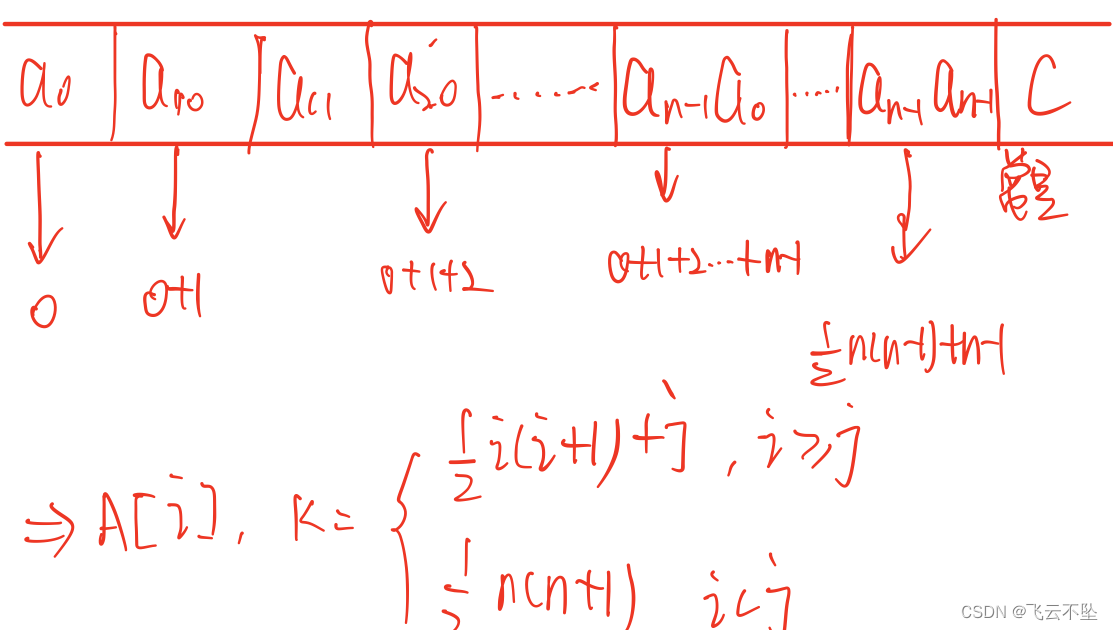
1.对称矩阵
定义: a[i][j] = a[j][i]
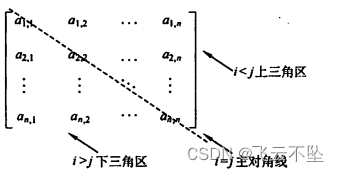
假设只存储下三角区(i > j)
则:
2.三角矩阵
定义:上三角或者下三角的所有元素为同一个常量
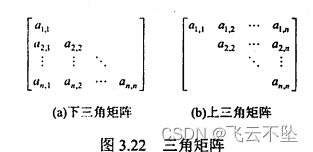
存储:(下三角)在数组中先存完三角元素和对角线,再存储常量。
3.三对角矩阵
定义:|i- j| > 1时,A[i][j] = 0,又称带状矩阵
















 108
108











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









