









第三章 KNN
3.1 基本介绍
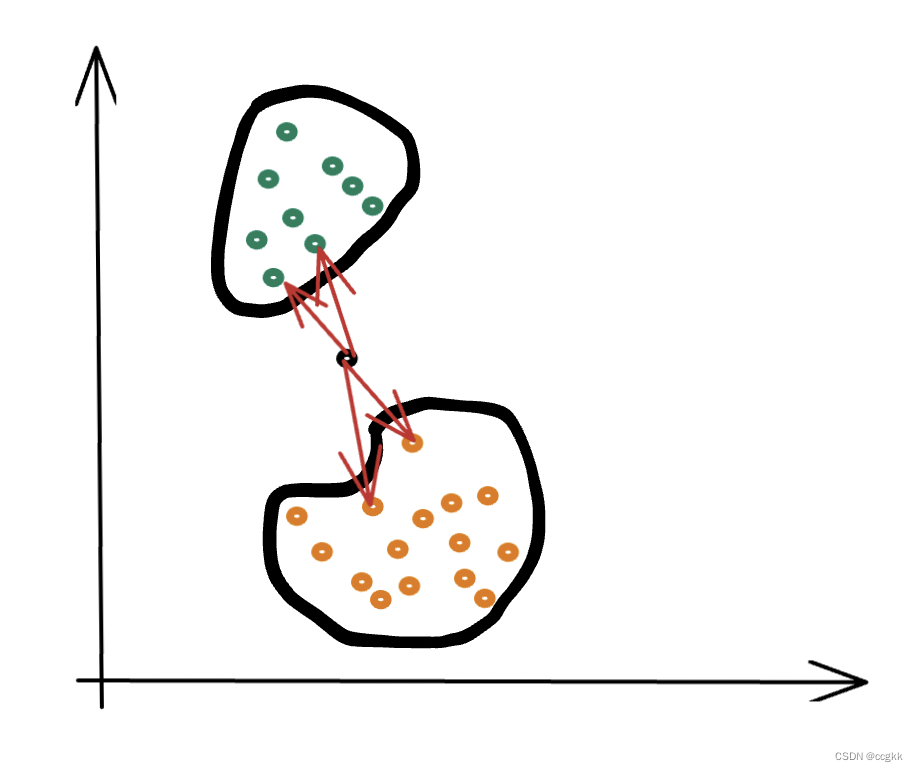
k近邻法(K-nearest neighbor,knn)是一种基本分类与回归方法。简单、直观来说,其在给定一个训练数据集,对新的输入实例,在训练数据集中找到与该实例最邻近的K个实例,这个k个实例的多数属于某个类就把该输入的实例分为这个类。因此,k近邻法不具有显式的学习过程。
3.2 k近邻模型
k近邻法使用的模型实际上对应于特征空间的划分。模型由三个基本要素——距离度量、k值选择和分类决策规则决定。
3.2.1 距离度量
L
p
L_p
Lp距离或
M
i
n
k
o
w
s
k
i
Minkowski
Minkowski距离定义如下:
L
p
(
x
i
,
x
j
)
=
(
∑
l
=
1
n
∣
x
i
(
l
)
−
x
j
(
l
)
∣
p
)
1
p
L_p(x_i,x_j)= (\sum_{l=1}^{n}|x_{i}^{(l)}-x_{j}^{(l)}|^p)^\frac{1}{p}
Lp(xi,xj)=(l=1∑n∣xi(l)−xj(l)∣p)p1
特别得,当
p
=
1
p=1
p=1时,该距离称为曼哈顿距离;当
p
=
2
p=2
p=2时,称为欧式距离。在二维下,
x
1
(
2
,
4
)
x_1(2,4)
x1(2,4)与
x
2
(
5
,
7
)
x_2(5,7)
x2(5,7)之间的欧式距离计算式如下:
L
2
(
x
1
,
x
2
)
=
(
2
−
5
)
2
+
(
4
−
7
)
2
L_2(x_1,x_2)=\sqrt{(2-5)^2+(4-7)^2}
L2(x1,x2)=(2−5)2+(4−7)2
3.2.2 k值选择
k值的选择会对k近邻法的结果产生重大影响。k值的减小意味着整体模型变得复杂,容易发生过拟合。如果k值取得较大,意味模型变得简单,使得预测容易发生错误。在实际应用中,k值一般取一个比较小的数值,且一般取奇数。同时,k也往往作为超参数搜寻得对象。k值的选择反映了对近似误差和估计误差之间的权衡,通常由交叉验证选择最优的k。
3.2.3 分类决策
一般采用多数表决规则。如果
N
k
(
x
)
N_k(x)
Nk(x)的区域类别是
c
j
c_j
cj,那么误分类的概率是
1
k
∑
x
i
∈
N
k
(
x
)
I
(
y
i
≠
c
j
)
=
1
−
1
k
∑
x
i
∈
N
k
(
x
)
I
(
y
i
=
c
j
)
\frac{1}{k} \sum_{{x_i}\in{N_{k(x)}}}I(y_{i} \neq c_{j})=1-\frac{1}{k}\sum_{x_{i} \in {N_k(x)}}I(y_{i}=c_{j})
k1xi∈Nk(x)∑I(yi=cj)=1−k1xi∈Nk(x)∑I(yi=cj)
所以,要使误分类率最小即经验风险最小,就要使
∑
x
i
∈
N
k
(
x
)
I
(
y
i
=
c
j
)
\sum_{{x_i}\in{N_{k(x)}}}I(y_i=c_j)
∑xi∈Nk(x)I(yi=cj)最大。所以多数表决规则等价于经验风险最小化。当然除了多数表决这种规则,还要距离同等权重,以及距离越近,权重越大。
3.3 构造kd树
k近邻法最简单的实现方法是线形扫描,但是当训练数据集非常大的时候,这种方法是不可行的。为了提高k近邻搜索效率,可以考虑使用特殊的结构储存训练数据,以减少计算距离的次数。使用kd树就是一种有效的方法【注意这里的kd树是储存k维空间数据的树结构,这里的k与k近邻法中的k意义不同】,构造平衡kd树具体算法如下:
输入:k维空间数据集T={ x 1 , x 2 , ⋅ ⋅ ⋅ ⋅ , x N x_1,x_2,····,x_N x1,x2,⋅⋅⋅⋅,xN},其中 x i = ( x i ( 1 ) , x i ( 2 ) , ⋅ ⋅ ⋅ , x i ( k ) ) T x_i=(x_i^{(1)},x_i^{(2)},···,x_i^{(k)})^T xi=(xi(1),xi(2),⋅⋅⋅,xi(k))T, i = 1 , 2 , ⋅ ⋅ ⋅ i=1,2,··· i=1,2,⋅⋅⋅,N;
输出:kd树
例:给定一个二维空间数据集:
T
=
{
(
2
,
3
)
T
,
(
5
,
4
)
T
,
(
9
,
6
)
T
,
(
4
,
7
)
T
,
(
8
,
1
)
T
,
(
7
,
2
)
T
}
T=\{(2,3)^T,(5,4)^T,(9,6)^T,(4,7)^T,(8,1)^T,(7,2)^T\}
T={(2,3)T,(5,4)T,(9,6)T,(4,7)T,(8,1)T,(7,2)T}
构造一个kd平衡树。
解:
观察
x
(
1
)
x^{(1)}
x(1)中6个点值分别为2,4,5,7,8,9======> 中位数点为7,以平面
x
(
1
)
=
7
x^{(1)}=7
x(1)=7将空间分为左、右两个子矩形,此事根节点为
(
7
,
2
)
(7,2)
(7,2);如下图所示:

接着,左矩形中,以 x ( 2 ) = 3 , 4 , 7 x^{(2)}=3,4,7 x(2)=3,4,7,以 x ( 2 ) = 4 x^{(2)}=4 x(2)=4分为两个矩形,此时左边第一节点为 ( 5 , 4 ) (5,4) (5,4)如下所示:

再在上下矩形进行拆分(大在右边,小在左边),针对 x ( 1 ) = 7 x^{(1)}=7 x(1)=7的右边同理,最终拆分结果如下图所示(注意:在三维中,这些线条就是切割平面):

按照刚才划分的顺序,构造的平衡kd树如下:

3.4 搜索kd树
3.4.1 算法
输入:已构造的kd树,目标x
输出:x的最近邻点
(1) 寻找“当前最近邻点”
- 从根节点出发,递归访问kd树,找出包含x的叶节点;
- 以此叶节点为“当前最近点”
(2) 回溯
- 若该节点比“当前最近点”距离目标点更近,更新“当前最近点”;
- 当前最近点一定存在于该节点一个子节点对应的区域,检查子结点的父结点的另一子节点对应的区域是否有更近的点
(3) 当回退到根节点时,搜索结束,最后的“当前最近点”即为x的最近邻点。
3.4.2 寻找最近点
基于上面的算法可能仍然比较混乱,这时候,我们在3.3的基础之上来具体演示这个算法是如何工作的。
3.4.2.1 案例1
- 在上面3.3的例子中,找到
x
=
(
2.1
,
3.1
)
x=(2.1,3.1)
x=(2.1,3.1)的最近点。从根节点出发,递归地向下访问kd树。若目标点x当前维的坐标小于且分点的坐标,则移动左节点,否则,移动到右节点。直到子节点为叶节点为止。【此时,最近点为(2,3)】
![[pic14.png|500]] - 以我们的目标点为圆心,到该矩形中最近点的距离作为半径r,如图中绿圈所示;
- 开始回溯:
- 因为该绿圈没有与其父节点的切割平面 x ( 2 ) = 4 x^{(2)}=4 x(2)=4相交,所以在 x ( 2 ) = 4 x^{(2)}=4 x(2)=4的上部分区域没有比(2,3)离目标点更近的点。
- 再顺着节点往上走,其与父节点的父节点的切割平面 x ( 1 ) = 7 x^{(1)}=7 x(1)=7也没有相交,说明在 x ( 1 ) = 7 x^{(1)}=7 x(1)=7的右边矩形区域中也没有比(2,3)离目标点更近的点了。
- 综上,(2,3)就是距离目标最近的点。
3.4.2.2 案例2
案例1中的例子似乎有些特别,在这里,我们用上面相同的办法来寻找 x = ( 2 , 4.5 ) x=(2,4.5) x=(2,4.5)的最近点。
- 同样,先根据二叉树的特点(左小右大、下小上大),确定目标点所在的位置,并在此矩形中找到距离目标点最近的点,并以它们之间的距离作为半径,目标点作为圆心画圆。如图中绿色的圆所示。
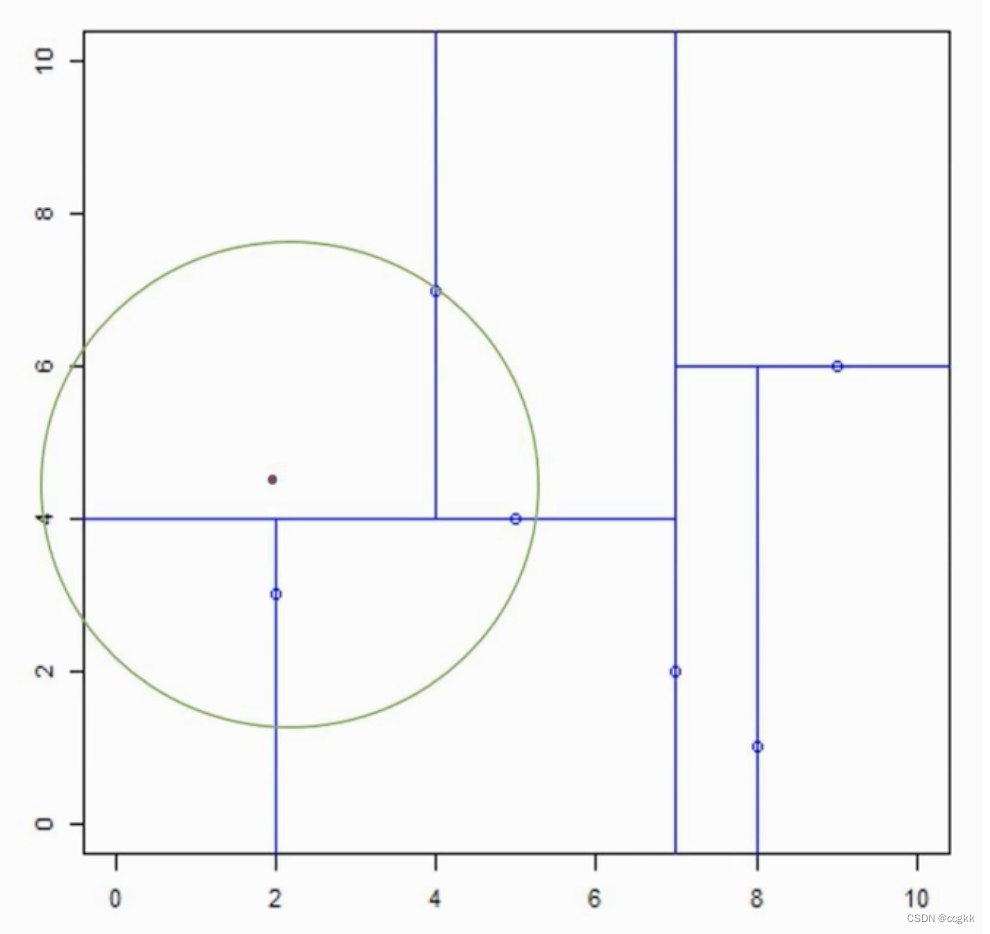
- 开始回溯:
-
因为该圆与目前最近点的父节点的切割超平面 x ( 2 ) = 4 x^{(2)}=4 x(2)=4相交,因此,我们要检查该父节点的另一子节点对应的区域是否有更近的点。显然是有的,即 x = ( 2 , 3 ) x=(2,3) x=(2,3)是比 x = ( 4 , 7 ) x=(4,7) x=(4,7)距离目标更近的点。
-
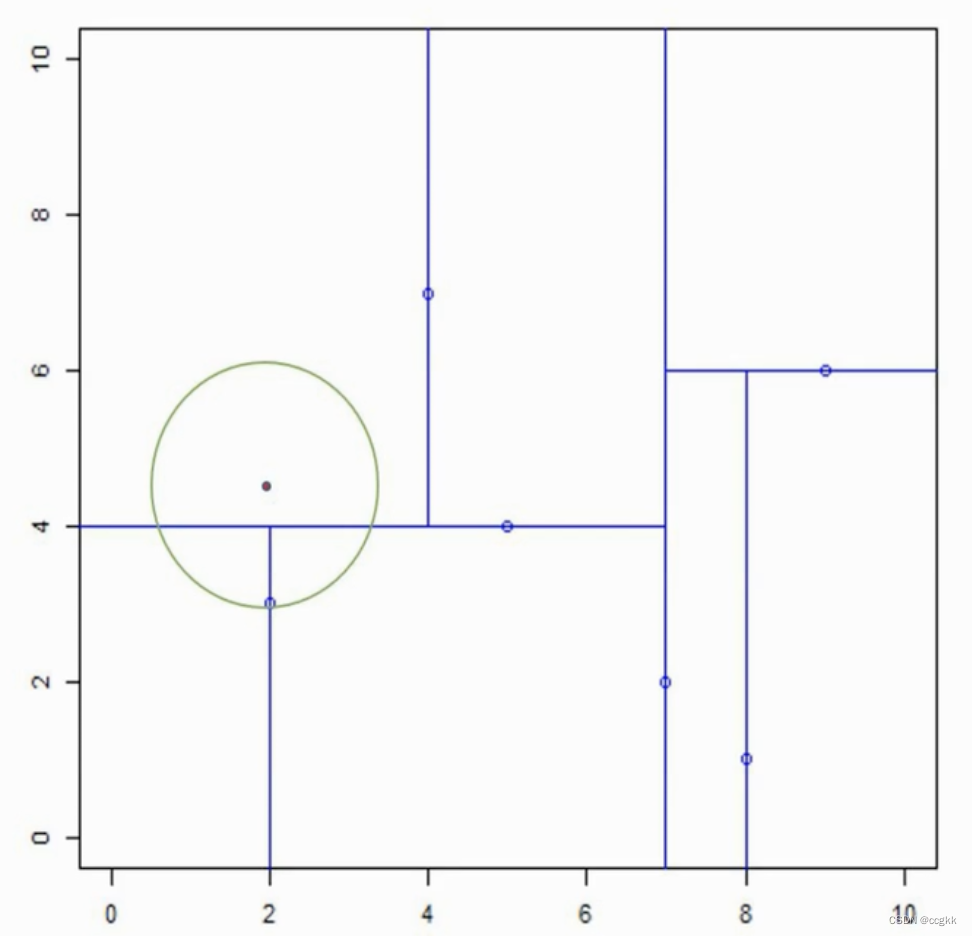
更新最近点 x = ( 2 , 3 ) x=(2,3) x=(2,3),并根据上面的原则,重新绘制这个圆,如下图所示。
-
这时,我们还是按照上述的规则,检查该圆与最近点的父节点是否有相交,发现是相交的。但是该父节点的另一子节点区域没有比该最近点到目标点更近的点,因此再检查该圆形是否与父节点的父节点的切割超平面相交,这里是 x ( 1 ) = 7 x^{(1)}=7 x(1)=7,没有相交,且 ( 7 , 2 ) (7,2) (7,2)为根节点。最终确定了目标点 ( 2 , 4.5 ) (2,4.5) (2,4.5)的最近点为 ( 2 , 3 ) (2,3) (2,3)
-















 1436
1436











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









