






前言
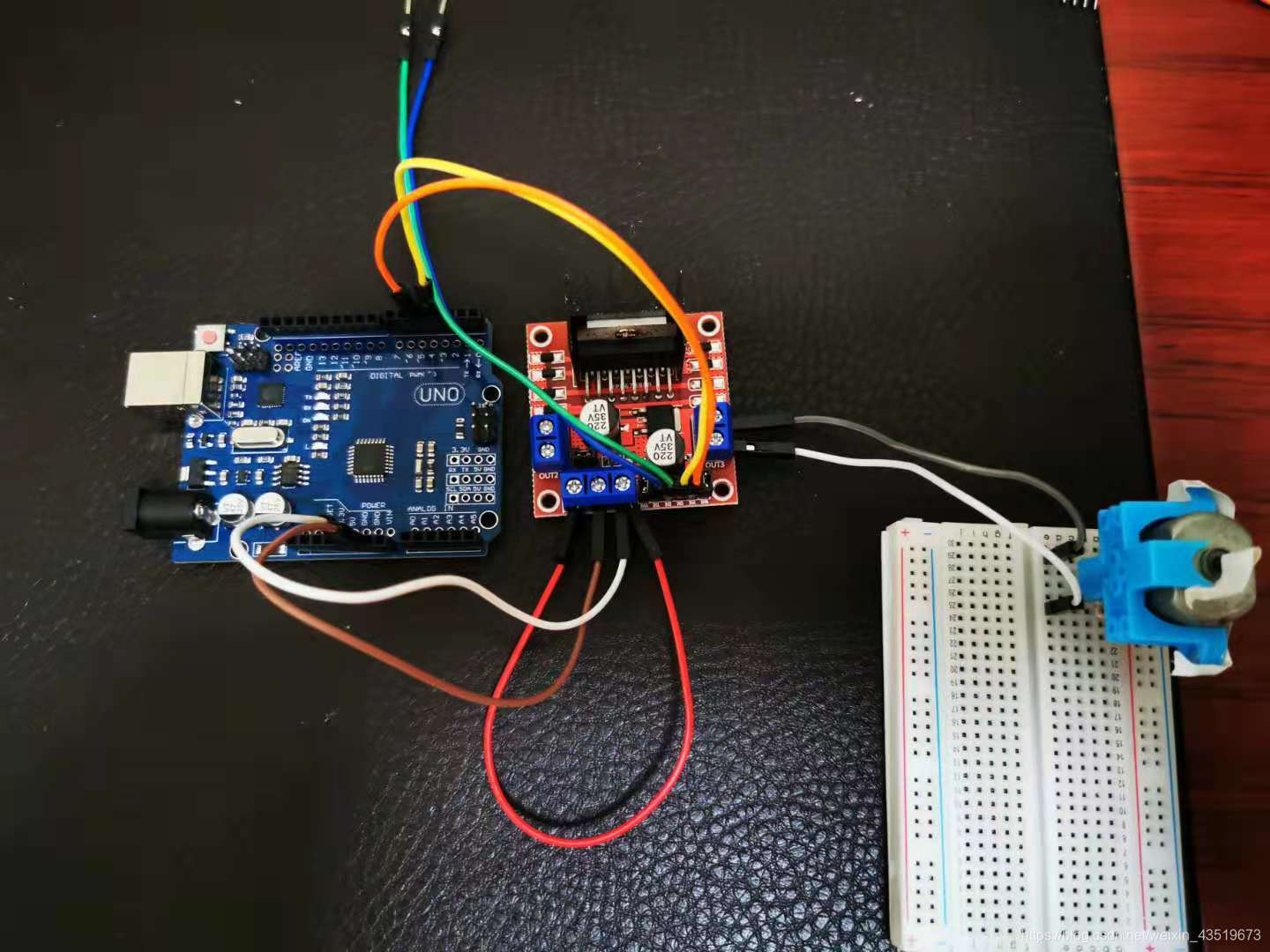
最近正在试着用单片机制作自己的遥控模型,少不了需要用到直流电机。下面就让我们来进入第一步,使用电机驱动板。
为什么要用驱动板
为什么要用驱动板呢?很多教程其实没有直接回答这个问题,下面是我的一些理解,希望可以起到抛砖引玉的作用。
电机和单片机常常使用不同的电压进行工作,为了提供足够的功率,一般电机会使用较高的电压。
为了能够让电机能够接收控制电路传来的速度、方向等控制信号,我们需要用一个既能给电机单独供电,又能够给电机传达信号的设备来连接。
驱动板内部有继电器,可以解析来自单片机的控制信号,并把它用电机的工作电压输出给电机,从而达到控制的效果。
驱动板的引脚介绍
了解了驱动板的作用,那么我们就来进入驱动板引脚的认记环节。
本项目使用了L298N,原因是它可以同时给2个直流电机供电,为制作遥控车提供了便利。
L298N驱动板的引脚如下:
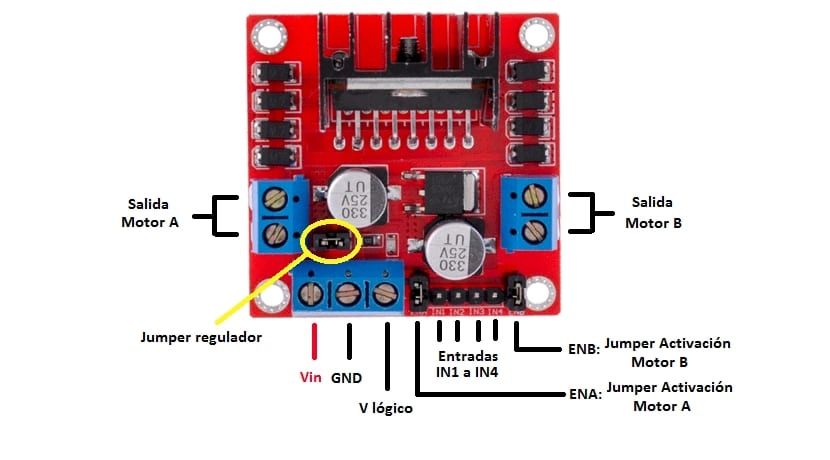
按照从左到右,从上到下的顺序,让我们来认识一下L298N的接线。
电机输出端
左边的端子旁边写有OUT1和OUT2,这是连接一号马达的输出端口。马达在通电时转子通电而成为电磁铁,于是在磁场作用下开始转动。
在使用中,我们定义OUT1为高电平,OUT2为低电平的时候,电机会正转,那么反过来则电机反转。若让两个端子都处于同样的电平,那么电机停止转动。
相对应地,右边的端子分别为OUT3和OUT4,这两个是连接2号马达使用的输出端口。
电源接入端
驱动板左下角的三个引脚从左到右分别为Vin (有的版本会标为+12V), GND ,和+5V(逻辑电压,用于传递控制信号)
Vin端口(标识为 "+12V" ) 连接给马达供电的电压正极,若你的马达需要12V工作,那么此处接12V。 L298N的马达供电电压最高为46V,最大电流不得超过2A,注意不要超出这个限制范围。
GND需要同时接马达供电的负极以及控制单元的负极。注意:两个马达需要相同的基准低电平来进行工作。
+5V 端口接单片机的5V接口,这个端口的工作电压是5V~35V,最大电流不得超过2A,注意不要超出这个范围。
这三个引脚的上方有一个跳线,当移除此跳线之后,Vin 和 +5V 将会连通。此时只需要给 Vin 接正极,+5V将会有和Vin相同的电平。 这个跳线主要用于电机和单片机工作电压相同的时候用同一个电源进行供电。
控制逻辑接入端
板子右下角有6个端口,最左边的和最右边的是跳线组,分别叫做ENA和ENB。这两个跳线是使能端口,当连接起来的时候,ENA控制OUT1和OUT2的输出, ENB控制OUT3和OUT4的输出。驱动直流电机时不要把跳线帽取下。
剩下的4个端口分别为OUT1 OUT2 和 OUT3 OUT4 的控制引脚。这四个端口分别连接在单片机的4个引脚上。
通过给左边两个端口通高电平或者低电平,可以控制电机的正转和反转。比如以高压为1,低压为0来表示, 10可以使得电机正转,01可以让电机反转。
除了进行电机转向的控制之外,控制通断的频率,可以调节电机转速。
下一篇我们将会进入Arduino编程的环节,通过代码来进行马达的操控。
参考资料
L298N资料














 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









