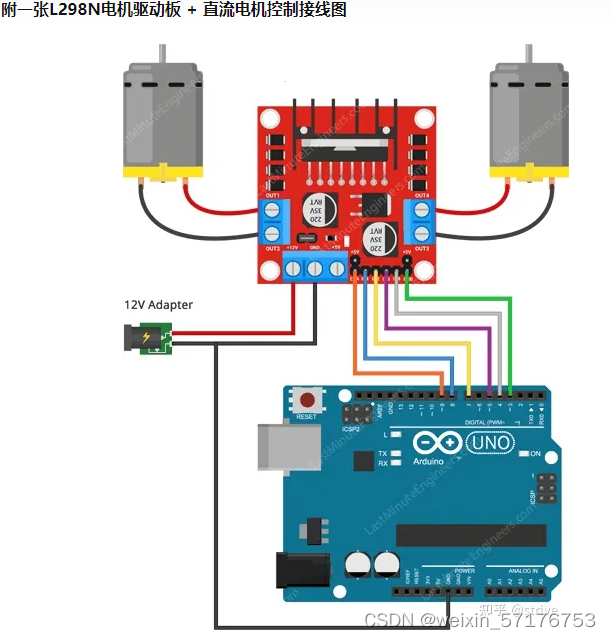
一、接线
二、使用步骤
int Left_motor_go=8; //左电机前进(IN1)
int Left_motor_back=9; //左电机后退(IN2)
int Right_motor_go=10; // 右电机前进(IN3)
int Right_motor_back=11; // 右电机后退(IN4)
char getstr;
int moshi = 0;
#include <SoftwareSerial.h>
//这是软串口通讯arduino和esp8266-Mode连接的库函数
SoftwareSerial youSerial(50, 51); //RX=50,TX=51 需分配Mega 和 Mega 2560 上并非所有引脚都支持更改中断,因此只有以下引脚可用于 RX:10、11、12、13、14、15、50、51、52、53、A8 (62)、A9 (63)、A10 (64)、A11 (65)、A12 (66)、A13 (67)、A14 (68)、A15 (69)。
void setup()
{
//红外模块初始化
//初始化电机驱动IO为输出方式
pinMode(Left_motor_go,OUTPUT); // PIN 8 8脚无PWM功能
pinMode(Left_motor_back,OUTPUT); // PIN 9 (PWM)
pinMode(Right_motor_go,OUTPUT);// PIN 10 (PWM)
pinMode(Right_motor_back,OUTPUT);// PIN 11 (PWM)
Serial.begin(9600);
youSerial.begin(9600);
}
void run() // 前进
{
digitalWrite(Right_motor_go,HIGH); // 右电机前进
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,HIGH); // 左电机前进
digitalWrite(Left_motor_back,LOW);
analogWrite(Right_motor_go,200);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Right_motor_back,0);
analogWrite(Left_motor_go,200);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Left_motor_back,0);
}
void back() // 后退
{
digitalWrite(Right_motor_go,LOW); // 右电机后退
digitalWrite(Right_motor_back,HIGH);
digitalWrite(Left_motor_go,LOW); // 左电机后退
digitalWrite(Left_motor_back,HIGH);
analogWrite(Right_motor_go,0);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Right_motor_back,200);
analogWrite(Left_motor_go,0);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Left_motor_back,200);
}
void left() // 左转
{
digitalWrite(Right_motor_go,HIGH); // 右电机前进
digitalWrite(Right_motor_back,LOW);
digitalWrite(Left_motor_go,LOW); // 左电机后退
digitalWrite(Left_motor_back,HIGH);
analogWrite(Right_motor_go,200);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Right_motor_back,0);
analogWrite(Left_motor_go,0);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Left_motor_back,100);//内圆,幅度小
}
void right() // 右转
{
digitalWrite(Right_motor_go,LOW); // 右电机后退
digitalWrite(Right_motor_back,HIGH);
digitalWrite(Left_motor_go,HIGH); // 左电机前进
digitalWrite(Left_motor_back,LOW);
analogWrite(Right_motor_go,0);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Right_motor_back,100);
analogWrite(Left_motor_go,200);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Left_motor_back,0);
}
void stop() // 停止
{
digitalWrite(Right_motor_go,LOW); // 右电机停止
digitalWrite(Right_motor_back,LOW);
analogWrite(Left_motor_go,0);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Left_motor_back,0);
digitalWrite(Left_motor_go,LOW); // 左电机停止
digitalWrite(Left_motor_back,LOW);
analogWrite(Left_motor_go,0);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Left_motor_back,0);
analogWrite(Left_motor_go,0);//PWM比例0~255调速,左右轮差异略增减
analogWrite(Left_motor_back,0);
}
void moshiqiehuang()
{
}
void zhongzhi()
{
}
void loop()
{
if(youSerial.available() > 0)
{
getstr=youSerial.read();
}
switch(getstr){
case 'w':
Serial.println("run");
run();break;
case 'a':
Serial.println("left");
left();break;
case 'd':
Serial.println("right");
right();break;
case 's':
Serial.println("back");
back();break;
case 't':
Serial.println("stop");
stop();break;
case 'q':
Serial.println("moshiqiehuang");
// moshiqiehuang();break;
case 'z':
Serial.println("zhongzhi");
zhongzhi();break;
}
}
总结



























 1127
1127

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











