







 本文介绍了线性变换的基本概念,通过投影和旋转的例子展示如何描述和计算线性变换,以及如何通过矩阵来表示这些变换。还探讨了矩阵的逆和乘法与线性变换的关系。
本文介绍了线性变换的基本概念,通过投影和旋转的例子展示如何描述和计算线性变换,以及如何通过矩阵来表示这些变换。还探讨了矩阵的逆和乘法与线性变换的关系。
目录
线性变换 Linear transformations
本讲介绍线性变换。在传统的线代课程中,线性变换会出现在的比矩阵还要早的位置,实际上可以在脱离坐标和具体数值的情况下讨论线性变换。但是面对科学计算的课题,还是要回到坐标上来。每个线性变换都对应于一个矩阵,矩阵概念的背后就是线性变换的概念。
举例
例:投影 Projection
抛开矩阵,从线性变换的概念来讨论“投影”。通过线性变换使得平面内的一个向量变为平面内的另一个向量,这种变换关系通常称之为“映射”(mapping)。
T : R 2 → R 2 T: R^2 →R^2 T:R2→R2
T(v)就像一个函数,给一个输入,进行线性变换后得到一个输出。比如将二维平面的向量投影到一条直线上。
线性代数只讨论线性变换,而线性变换符合如下规则:对于任意向量 v,w 和标量 c,T(v+w)=T(v)+T(w);T(cv)=cT(v)
将两者结合就得到:T(cv+dw)=cT(v)+dT(w)。
反例:平面平移 Shift whole plane
沿着某方向 v0平移一个平面。这就不是一个线性变换。两条法则都违反。更简单的验证方法是线性运算规则的特例 T(0)=0,“平移”不符合这个规则特例。
反例:求长度 T ( v ) = ∥ V ∥ T(v)= \begin{Vmatrix} V \end{Vmatrix} T(v)= V
这个线性变换,输入一个三维向量,得到一个数值,或者说一维向量 T : R 3 → R 1 T:R^3→R^1 T:R3→R1。这个变换可以满足 T(0)=0,但是数乘负数就不符合规则。
例:旋转 45 度 R o t a t i o n b y 4 5 o Rotation by 45^o Rotationby45o
例:矩阵
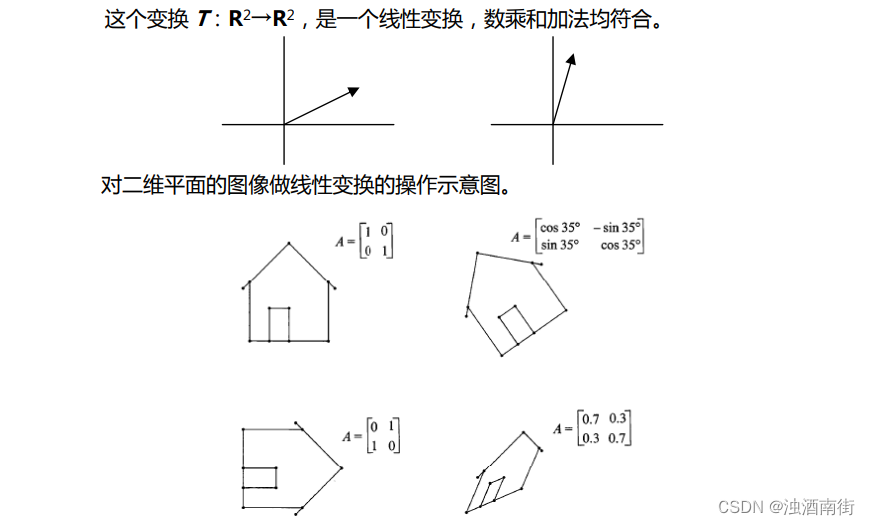
T(v)=Av,矩阵乘法是一个线性变换。A(v+w)=A(v)+A(w);A(cv)=cA(v)。整个平面可以通过矩阵的乘法完成变换。
例如,对上图的房子图像施加矩阵 A = [ 1 0 0 − 1 ] A= \begin{bmatrix} 1&0\\0&-1 \end{bmatrix} A=[100−1] ,则输出的是上下颠倒的房子。
理解线性变换的本质就是确定它背后的矩阵。
例: 对某一线性变换 T : R 3 → R 2 T:R^3→R^2 T:R3→R2,输入一个三维向量而输出是一个二维向量。变成矩阵的形式 T(v)=Av,则矩阵 A 是一个 2 X 3 矩阵。
描述线性变换 Describing T(v)
在平面内,如果我们已经了解两个线性无关的向量 v1 和 v2 经过线性变换的结果 T(v1)和 T(v2),我们实际上可以通过其线性组合,了解平面内所有的向量线性变换的结果。因此如果我们想了解线性变换对整个输入空间的影响,只需要确定它的一组基 v1,v2……vn线性变换的结果。
v = c 1 v 1 + c 2 v 2 + … … + c n v n T ( v ) = c 1 T ( v 1 ) + c 2 T ( v 2 ) + … … + c n T ( v n ) v=c_1v_1+c_2v_2+……+c_nv_n \\ T(v)=c_1T(v_1)+c_2T(v_2)+……+c_nT(v_n) v=c1v1+c2v2+……+cnvnT(v)=c
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2287
2287

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









