







一,利用系统自带PWM捕获
1.代码
初始化
``
```c
#include"capture.h"
#include"stm32f10x.h"
void Capture_Init()
{
//PA7->TIM3_CH2
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 0xffff;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;//通道二直连
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_PWMIConfig(TIM3, &TIM_ICInitStructure);
TIM_SelectInputTrigger(TIM3, TIM_TS_TI2FP2);
TIM_SelectSlaveMode(TIM3, TIM_SlaveMode_Reset);
TIM_SelectMasterSlaveMode(TIM3, TIM_MasterSlaveMode_Enable);
TIM_Cmd(TIM3, ENABLE);
TIM_ITConfig(TIM3, TIM_IT_CC2, ENABLE);
}
中断
u32 Capture1_value=0;
u32 Capture2_value=0;
u32 Frequence=0;
u32 Duty=0;
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_CC2) == SET)
{
TIM_ClearITPendingBit(TIM3, TIM_IT_CC2);
Capture1_value=TIM_GetCapture2(TIM3);//周期
Capture2_value=TIM_GetCapture1(TIM3);//占空比
if(Capture2_value!=0)
{
Frequence=1000000/(float)(Capture1_value+1);
Duty=(float)(Capture2_value+1)*100/(Capture1_value+1);
}
else
{
Frequence=0;
Duty=0;
}
}
}`
2.思想:
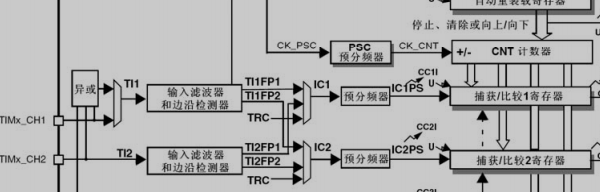
上面是定时器框图:
系统自带PWM捕获简单来说就是:通过初始化 TIM_ICInitStructure.TIM_ICSelection
= TIM_ICSelection_DirectTI函数语句,决定直连还是非直连方式
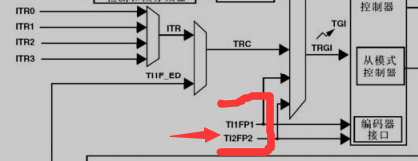
以通道二为例:此处初始化为直连,则对应下图工作模式

中断函数中TIM_GetCapture2()捕获到的为周期,
而TIM_GetCapture1()捕获到的为占空比。
*若初始化为非直连,则线路对应下图

因此中断函数中TIM_GetCapture1()捕获到的为周期,
而TIM_GetCapture2()捕获到的为占空比。
**但必须注意的是,由硬件决定了,这种捕获方式只能用于通道一和通道二**
自己深知硬件水平不行,原理没有说清楚,如果有需要,可以观看野火这节教学视频<野火>
二,根据PWM波性质
1.代码
初始化
#include"capture.h"
#include"stm32f10x.h"
//PA1->TIM2_CH2;PA2_TIM2_CH3;
void Capture_Init(void)
{
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Period = 0xffff;
TIM_TimeBaseStructure.TIM_Prescaler = 71;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_3;
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
TIM_ICInitStructure.TIM_ICFilter = 0x0;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_Cmd(TIM2, ENABLE);
TIM_ITConfig(TIM2, TIM_IT_CC2 | TIM_IT_CC3, ENABLE);
}
中断
u8 TIM2_FLAG=0;
u8 TIM2_CH2_MODE;
u8 TIM2_CH3_MODE;
u32 TIM2_CH2_CAPTURE_HL;
u32 TIM2_CH3_CAPTURE_HL;
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_CC2) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC2);
if(!TIM2_FLAG)
{
switch(TIM2_CH2_MODE)
{
case 0 : TIM2_CH2_MODE=1;
TIM2_CH2_CAPTURE_HL=0;
TIM_SetCounter(TIM2,0);
break;
case 1 : TIM2_CH2_MODE=2;
TIM2_CH2_CAPTURE_HL=TIM_GetCounter(TIM2);
break;
default : break;
}
}
else
{
TIM2_CH2_MODE=0;
}
}
if(TIM_GetITStatus(TIM2, TIM_IT_CC3) == SET)
{
TIM_ClearITPendingBit(TIM2, TIM_IT_CC3);
if(TIM2_FLAG)
{
switch(TIM2_CH3_MODE)
{
case 0 : TIM2_CH3_MODE=1;
TIM2_CH3_CAPTURE_HL=0;
TIM_SetCounter(TIM2,0);
break;
case 1 : TIM2_CH3_MODE=2;
TIM2_CH3_CAPTURE_HL=TIM_GetCounter(TIM2);
break;
default : break;
}
}
else
{
TIM2_CH3_MODE=0;
}
}
}
void SysTick_Handler(void)
{
static u16 count1=0;
delaytime--;
if(++count1>=200)
{
count1=0;
TIM2_FLAG^=1; //TIM2二通道和三通道分时复用
}
}
2,思想
请转载到这位大佬的博文下:自己也是看着这位大佬的思路学到的
https://blog.csdn.net/qq_34952376/article/details/81172774
三,两种思想的优缺点比较
1.第一种系统自带捕获:配置简单,但局限于通道一和通道二
2.第二种对所有捕获通道都通用,配置稍微麻烦点。















 2114
2114











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









