







对于地面上 某一个顶点,建立世界坐标系,则该点
P
(
X
w
,
Y
w
,
Z
w
)
P(X_w,Y_w,Z_w)
P(Xw,Yw,Zw)。该点P通过相机在
U
1
,
U
2
U_1,U_2
U1,U2位置捕获,在
I
1
,
I
2
I_1,I_2
I1,I2上对应坐标分别表示为
p
1
(
u
1
,
v
1
,
1
)
和
p
2
(
u
2
,
v
2
,
1
)
p_1(u_1,v_1,1)和p_2(u_2,v_2,1)
p1(u1,v1,1)和p2(u2,v2,1)。单应性矩阵H可以通过下式表示:
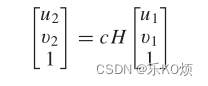
其中C表示一个非零常数项。以
U
1
U_1
U1作为世界坐标系的原点,则该坐标轴是在相机投影中心建立的垂直于图像x,y轴的坐标,根据相机的成像原理。有

其中,K代表3x3的相机内参矩阵通过相机焦距、传感器每个像素实际大小、相机光轴、图像平面的焦点坐标计算得到。
Z
c
1
Z_{c1}
Zc1是非零常数。
同理:对于第二张图片点对应关系:
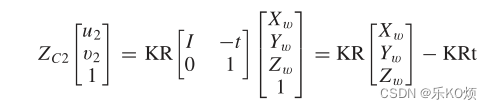
其中,R[I, -t]代表UAV在位置U1和U2之间的相对运动,可以通过旋转平移得到。对于U1建立的世界坐标系下一点,先通过平移,旋转到U2下建立的等同世界坐标系,然后通过K内参矩阵转化为像素坐标系下。
对于地面上任意一点
P
(
X
w
,
Y
w
,
Z
w
)
P(X_w,Y_w,Z_w)
P(Xw,Yw,Zw),有下面一个式子:

其中,n是测地面的单位法向量,d是无人机飞行高度。
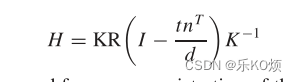
最终得到H。














02-05
02-12
04-16
 6229
6229
6229
02-12
07-26
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









