







文章目录
单源最短路径
Bellman-Floyd 算法
算法描述
需要一个一维数组dist[]来存储每个点到起点的距离,设起点为S,终点为D,那这条最短路径一定是 S->p1->p2->...->D的形式。
思想上和上述的算法保持一致,就是暴力解法
你想求出某点到其他所有点的最短路径:
- 第一次遍历,你求得固定点
一步可以到达的点的结果,其余点结果为知; - 第二次遍历,你求得固定点
两步可以到达的点的结果; - ……
- 只要
图中不存在环,你遍历节点个数-2次,一定会得到所有的最短路径结果。这里用的是链式前向星存图。
实现代码
void Bellman_floyd(int n, int m) {
for (int j = 0; j < n - 1; j++) {
for (int i = 1; i <= m; ++i) {
dist[edges[i].to] = min(dist[edges[i].to], dist[edges[i].from]) + edges[i].w;
}
}
}
SPFA 算法 ( Shortest Path Faster Algorithm )
算法描述
观察发现,Bellman-Floyd算法第一次遍历时,可能更新的点只有S可以直接到达的点;
然后下一次遍历可能被更新的只可能是S能直接到达的点能直接到达的点。
SPFA算法正是利用这种思想,并进行优化。
借用队列这一数据结构,在每次对点操作时更新它能到达的点,并把队列中不存在的点加入队列,并出队操作结束的点,这样直到队列为空,也就满足了要求。
然而,该方法的时间复杂度不稳定,和上一种算法的思路是相同的,因此在最坏的情况下,时间复杂度为 O ( m n ) O(mn) O(mn)
题目
给定一个n个点m条边的有向图,图中可能存在重边和自环, 边权可能为负数。
请你求出1号点到n号点的最短距离,如果无法从1号点走到n号点,则输出impossible。
数据保证不存在负权回路。
输入格式
第一行包含整数n和m。
接下来m行每行包含三个整数x,y,z,表示存在一条从点x到点y的有向边,边长为z。
输出格式
输出一个整数,表示1号点到n号点的最短距离。
如果路径不存在,则输出”impossible”。
数据范围
1≤n,m≤10^5
图中涉及边长绝对值均不超过10000。
输入样例:
3 3
1 2 5
2 3 -3
1 3 4
输出样例:
2
python 代码实现
n, m = map(int, input().split())
idx = 0
h = [-1]*(n+1)
e, ne, w = [0]*(2*m+1), [0]*(2*m+1), [0]*(2*m+1)
dist = [float('inf')]*(n+1)
def add(a, b, wei):
global idx
e[idx], w[idx] = b, wei
h[a], ne[idx] = idx, h[a]
idx += 1
def spfa():
queue = [1]
st = [False]*(n+1) # 用来判断当前点是否在队列中
dist[1] = 0
hh, tt = 0, 0
while hh <= tt:
t = queue[hh]; hh += 1
st[t] = False
i = h[t]
while i != -1:
j, wei = e[i], w[i]
if dist[j] > dist[t] + wei:
dist[j] = dist[t] + wei
if not st[j]:
queue.append(j)
st[j] = True
tt += 1
i = ne[i]
for _ in range(m):
a, b, wei = map(int, input().split())
add(a, b, wei)
spfa()
if dist[n] == float('inf'): print('impossible')
else: print(dist[n])
c++ 代码实现
void SPFA(int s) //s为固定点编号, inqueue数组判断节点是否在队列中
{
queue<int> Q;
Q.push(s);
while (!Q.empty()) {
int p = Q.front();
Q.pop();
inqueue[p] = 0;
for (int e = head[p]; e != 0; e = edges[e].next) {
int to = edges[e].to;
if (dist[to] > dist[p] + edges[e].w) {
dist[to] = dist[p] + edges[e].w;
if (!inqueue[to]) {
inqueue[to] = 1;
Q.push(to);
}
}
}
}
}
Dijkstra 算法
算法思想
Dijkstra算法基于一种贪心的思想,我们假定有一张没有负边的图。
- 设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径 , 就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中
- 在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。
- 此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。
例子
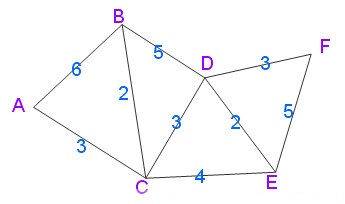
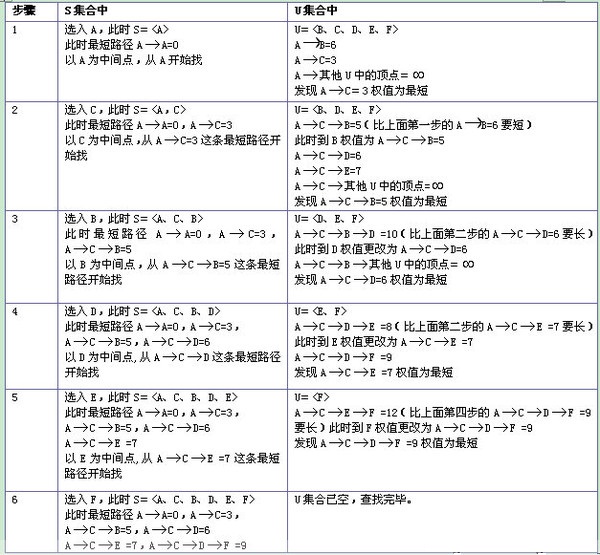
重点需要理解这句拗口的"按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度"
实际上,Dijkstra 算法是一个排序过程,就上面的例子来说,是根据A到图中其余点的最短路径长度进行排序,路径越短越先被找到,路径越长越靠后才能被找到,要找A到F的最短路径,我们依次找到了
A --> C 的最短路径 3
A --> C --> B 的最短路径 5
A --> C --> D 的最短路径 6
A --> C --> E 的最短路径 7
A --> C --> D --> F 的最短路径 9
Dijkstra 算法运行的附加效果是得到了另一个信息,A到C的路径最短,其次是A到B, A到D, A到E, A到F
再举一例, 初点a到b最短有权10,b到c有权50,a到d有权30,d到c有权20,求a到c的最短路径。
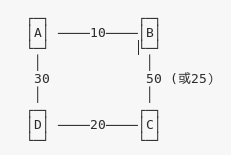
迪杰斯特拉算法的运行过程是一个排序的过程,既不是深度优先也不是广度优先算法。
根据A->某个点权值最小来判断下一个点是哪个点
就这个简单的例子而言,a和b都被加入S集合后,这时下一个要加入S集合结点,并不一定是c节点。 请把a和b节点组成的集合作为一个整体来考虑,当算法运行到 a和b 都被加入S集合后,你甚至都可以把 a 和 b在图中去掉用一个虚拟的s节点来表示,a 和 b 作为一个整体后,和这个整体相连接的边,最短的就是 a 到 d 这条边,但是,这时并不能直接因为这条边的权最小 就将d 加入 S 集合; 现在,再来假设 b 到 c的权不是50,而是25; 现在和 S 集合相连接的边有a到d 30, b到c 25; 这时,b到c的权值最小,但却不能加入S集合, 因为 a 到 b 再到 c的权是 10 + 25 已经大于 a 到 d的权 30, 所以 d 应该加入 S 集合,而不是 c; 如果b 到 c的权值小于20,就是 c先加入 S 集合,而不是 d 了; b 到 c的权值恰好等于20,那么随便,先把d加入 S 还是 先把 c 加入 S,都是一样的,没有区别。
另外,任意一点k,加入s集合后,就已经找到了从源点a到k的最短路径,前提条件是图中不能有带负数的权值边。 我这样表述可以让算法更清楚,还是这个例子, a和b都被选入 S 集合后,去更新整个图,把a和b都去掉,用新节点 s 代替a和b,s 到 d 有权30, s 到 c 有权 10+50, 下一步该选哪个节点并入 S 集合一目了然了吧。 d点选入 S 集合后,再把d点从图中抹去,更新虚拟的节点 s到c的权
C++ 代码实现
⾸先写⼀个结构体,⽤于保存最短距离和节点编号。
struct Polar {
int dist, id;
Polar(int dist, int id): dist(dist), id(id) {}
};
然后确定
struct cmp {
bool operator()(Polar a, Polar b) { // 重载 ()运算符,使其称为一个仿函数
return a.dist > b.dist; // 这里是大于,使得距离短的先出队
}
};
priority_quene<Polar, vector<Polar>, cmp> Q; // 小堆顶
int vis[n]; // 建立是否访问过的节点判断数组
算法实现:
void Dij(int s) {
dist[s] = 0;
Q.push(Polar(0, s));
while(!Q.empty()) {
int p = Q.top().id;
Q.pop();
if (vis[p])
continue;
vis[p] = 1;
for (int e = head[p]; e != 0; e = edge[e].next) {
int to = edges[e].to;
dist[to] = min(dist[to], dist[p] + edges[e].w);
if (!vis[to])
Q.push(Polar(dist[to], to));
}
}
}
怎样打印路径?
只需要建立一个pre数组,在更新dist时候更新pre即可。由于算法最后的结果是一棵树,因此数组中保存此编号节点的父节点即可。每条路有且仅有一个祖先节点,一步步溯源上去的路径是唯一的。
python 代码实现
class Dijkstra:
def __init__(self, graph, goal):
self.graph = graph
self.goal = goal
self.open_list = {}
# open_list初始化为一个空字典,keys为节点'1''2'...,values为distance即从'1'到该点的实际代价
self.closed_list = {}
# closed_list初始化为一个空字典,键和值与open_list相同
self.open_list['1'] = 0
# 因为我们初始节点为'1',并且'1'到'1'的值为0,将其传入open_list列表中
self.parent = {'1': None}
# 初始父节点为字典型,初始键为'1'值为None,其中键是子节点,值是父节点
self.min_dis = None
# 初始最短路径长度为None
def shortest_path(self):
while True:
if self.open_list is None:
print('搜索失败, 结束!')
break
distance, min_node = min(zip(self.open_list.values(), self.open_list.keys())) # 取出距离最小的节点
self.open_list.pop(min_node) # 将其从 open_list 中去除
self.closed_list[min_node] = distance # 将节点加入 closed_list 中
if min_node == self.goal: # 如果节点为终点
self.min_dis = distance
shortest_path = [self.goal] # 记录从终点回溯的路径
father_node = self.parent[self.goal]
while father_node != '1':
shortest_path.append(father_node)
father_node = self.parent[father_node]
shortest_path.append('1')
print(shortest_path[::-1]) # 逆序
print('最短路径的长度为:{}'.format(self.min_dis))
print('找到最短路径, 结束!')
return shortest_path[::-1], self.min_dis # 返回最短路径和最短路径长度
for node in self.graph[min_node].keys(): # 遍历当前节点的邻接节点
if node not in self.closed_list.keys(): # 邻接节点不在 closed_list 中
if node in self.open_list.keys(): # 如果节点在 open_list 中
if self.graph[min_node][node] + distance < self.open_list[node]:
self.open_list[node] = distance + self.graph[min_node][node] # 更新节点的值
self.parent[node] = min_node # 更新继承关系
else: # 如果节点不在 open_list 中
self.open_list[node] = distance + self.graph[min_node][node]
# 计算节点的值,并加入 open_list 中
self.parent[node] = min_node # 更新继承关系
if __name__ == '__main__':
g = {'1': {'2': 2, '3': 1, '4': 4},
'2': {'4': 3, '6': 2},
'3': {'5': 3},
'4': {'6': 1},
'5': {'4': 4, '6': 2}
}
goal = '6'
dijk1 = Dijkstra(g, goal)

















 211
211











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











