









建立考虑扩展齿接触(线外接触、尖角接触)的圆柱齿轮动力学模型如下
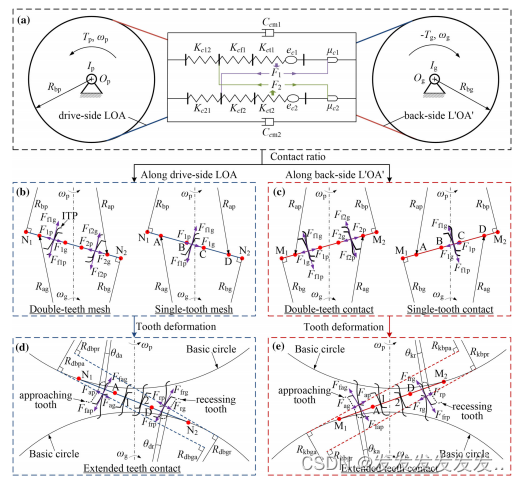
该模型的创新之处是:
齿轮啮合力不再采用传统的时变啮合刚度(静态、准静态条件下计算得到)乘以齿轮动态传递误差计算得到,而是直接采用齿轮刚度、齿廓误差e、齿轮动态传递误差x间的变形协调条件计算得到,计算公式如下
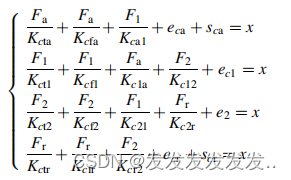
其中Fa、F1、F2和Fr即为计算得到的齿轮接触力。同时,公式中的Fa和Fr反映了扩展齿接触中Fa和Fr的接触力,当Fa>0中,意味着啮入齿发生接触;当Fr>0中,意味着啮出齿发生接触。上式中为多元非线性方程组,该方程组的求解程序可见多元非线性方程组求解的C语言源代码资源-CSDN文库
通过求解该动力学模型,可以获得系统的动力学响应、以及动态条件下扩展齿的接触状态如下
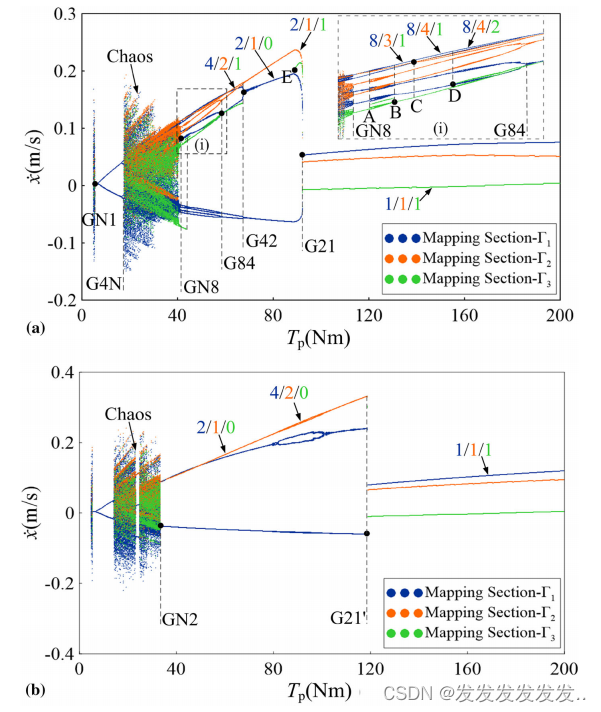
图中,蓝色为系统响应的周期数、橙色为啮入齿的接触状态、绿色为啮出齿的接触状态。
以上研究的详细内容可以见















 788
788











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









