






基于PaddlePaddle的深度ResNet网络进行眼疾识别项目
项目介绍
本项目是百度AI studio平台上的《21天百度架构师手把手带你零基础实践深度学习》课程的第二周实践作业,该次作业是基于PaddlePaddle的完整的深度学习项目。
眼疾识别数据集iChallenge-PM
iChallenge-PM是百度大脑和中山大学中山眼科中心联合举办的iChallenge比赛中,提供的关于病理性近视(Pathologic Myopia,PM)的医疗类数据集,包含1200个受试者的眼底视网膜图片,训练、验证和测试数据集各400张。如今近视已经成为困扰人们健康的一项全球性负担,在近视人群中,有超过35%的人患有重度近视。近视会拉长眼睛的光轴,也可能引起视网膜或者络网膜的病变。随着近视度数的不断加深,高度近视有可能引发病理性病变,这将会导致以下几种症状:视网膜或者络网膜发生退化、视盘区域萎缩、漆裂样纹损害、Fuchs斑等。因此,及早发现近视患者眼睛的病变并采取治疗,显得非常重要。
数据可以从AIStudio下载
数据集准备
该项目包括如下三个文件,可以点击这里进行下载,解压缩后存放在/home/aistudio/work/palm目录下。
- training.zip:包含训练中的图片和标签
- validation.zip:包含验证集的图片
- valid_gt.zip:包含验证集的标签
valid_gt.zip文件解压缩之后,需要将PM_Label_and_Fovea_Location.xlsx文件转存成csv格式,本节代码示例中已经提前转成文件labels.csv。
查看数据集图片
查看数据集图片
iChallenge-PM中既有病理性近视患者的眼底图片,也有非病理性近视患者的图片,命名规则如下:
- 病理性近视(PM):文件名以P开头
- 非病理性近视(non-PM):
- 高度近视(high myopia):文件名以H开头
- 正常眼睛(normal):文件名以N开头
我们将病理性患者的图片作为正样本,标签为1; 非病理性患者的图片作为负样本,标签为0。从数据集中选取两张图片,通过LeNet提取特征,构建分类器,对正负样本进行分类,并将图片显示出来。代码如下所示:
import os
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
from PIL import Image
DATADIR = '/home/aistudio/work/palm/PALM-Training400/PALM-Training400'
# 文件名以N开头的是正常眼底图片,以P开头的是病变眼底图片
file1 = 'N0012.jpg'
file2 = 'P0095.jpg'
# 读取图片
img1 = Image.open(os.path.join(DATADIR, file1))
img1 = np.array(img1)
img2 = Image.open(os.path.join(DATADIR, file2))
img2 = np.array(img2)
# 画出读取的图片
plt.figure(figsize=(16, 8))
f = plt.subplot(121)
f.set_title('Normal', fontsize=20)
plt.imshow(img1)
f = plt.subplot(122)
f.set_title('PM', fontsize=20)
plt.imshow(img2)
plt.show()

定义数据读取
import cv2
import random
import numpy as np
# 对读入的图像数据进行预处理
def transform_img(img):
# 将图片尺寸缩放道 224x224
img = cv2.resize(img, (224, 224))
# 读入的图像数据格式是[H, W, C]
# 使用转置操作将其变成[C, H, W]
img = np.transpose(img, (2,0,1))
img = img.astype('float32')
# 将数据范围调整到[-1.0, 1.0]之间
img = img / 255.
img = img * 2.0 - 1.0
return img
# 定义训练集数据读取器
def data_loader(datadir, batch_size=10, mode = 'train'):
# 将datadir目录下的文件列出来,每条文件都要读入
filenames = os.listdir(datadir)
def reader():
if mode == 'train':
# 训练时随机打乱数据顺序
random.shuffle(filenames)
batch_imgs = []
batch_labels = []
for name in filenames:
filepath = os.path.join(datadir, name)
img = cv2.imread(filepath)
img = transform_img(img)
if name[0] == 'H' or name[0] == 'N':
# H开头的文件名表示高度近似,N开头的文件名表示正常视力
# 高度近视和正常视力的样本,都不是病理性的,属于负样本,标签为0
label = 0
elif name[0] == 'P':
# P开头的是病理性近视,属于正样本,标签为1
label = 1
else:
raise('Not excepted file name')
# 每读取一个样本的数据,就将其放入数据列表中
batch_imgs.append(img)
batch_labels.append(label)
if len(batch_imgs) == batch_size:
# 当数据列表的长度等于batch_size的时候,
# 把这些数据当作一个mini-batch,并作为数据生成器的一个输出
imgs_array = np.array(batch_imgs).astype('float32')
labels_array = np.array(batch_labels).astype('float32').reshape(-1, 1)
yield imgs_array, labels_array
batch_imgs = []
batch_labels = []
if len(batch_imgs) > 0:
# 剩余样本数目不足一个batch_size的数据,一起打包成一个mini-batch
imgs_array = np.array(batch_imgs).astype('float32')
labels_array = np.array(batch_labels).astype('float32').reshape(-1, 1)
yield imgs_array, labels_array
return reader
# 定义验证集数据读取器
def valid_data_loader(datadir, csvfile, batch_size=10, mode='valid'):
# 训练集读取时通过文件名来确定样本标签,验证集则通过csvfile来读取每个图片对应的标签
# 请查看解压后的验证集标签数据,观察csvfile文件里面所包含的内容
# csvfile文件所包含的内容格式如下,每一行代表一个样本,
# 其中第一列是图片id,第二列是文件名,第三列是图片标签,
# 第四列和第五列是Fovea的坐标,与分类任务无关
# ID,imgName,Label,Fovea_X,Fovea_Y
# 1,V0001.jpg,0,1157.74,1019.87
# 2,V0002.jpg,1,1285.82,1080.47
# 打开包含验证集标签的csvfile,并读入其中的内容
filelists = open(csvfile).readlines()
def reader():
batch_imgs = []
batch_labels = []
for line in filelists[1:]:
line = line.strip().split(',')
name = line[1]
label = int(line[2])
# 根据图片文件名加载图片,并对图像数据作预处理
filepath = os.path.join(datadir, name)
img = cv2.imread(filepath)
img = transform_img(img)
# 每读取一个样本的数据,就将其放入数据列表中
batch_imgs.append(img)
batch_labels.append(label)
if len(batch_imgs) == batch_size:
# 当数据列表的长度等于batch_size的时候,
# 把这些数据当作一个mini-batch,并作为数据生成器的一个输出
imgs_array = np.array(batch_imgs).astype('float32')
labels_array = np.array(batch_labels).astype('float32').reshape(-1, 1)
yield imgs_array, labels_array
batch_imgs = []
batch_labels = []
if len(batch_imgs) > 0:
# 剩余样本数目不足一个batch_size的数据,一起打包成一个mini-batch
imgs_array = np.array(batch_imgs).astype('float32')
labels_array = np.array(batch_labels).astype('float32').reshape(-1, 1)
yield imgs_array, labels_array
return reader
ResNet网络模型
ResNet是2015年ImageNet比赛的冠军,将识别错误率降低到了3.6%,这个结果甚至超出了正常人眼识别的精度。
Kaiming He等人提出了残差网络ResNet来解决上述问题,其基本思想如 图1所示。
- 图1(a):表示增加网络的时候,将x映射成 y = F ( x ) y=F(x) y=F(x)输出。
- 图1(b):对图1(a)作了改进,输出
y
=
F
(
x
)
+
x
y=F(x) + x
y=F(x)+x。这时不是直接学习输出特征y的表示,而是学习
y
−
x
y-x
y−x。
- 如果想学习出原模型的表示,只需将F(x)的参数全部设置为0,则 y = x y=x y=x是恒等映射。
- F ( x ) = y − x F(x) = y - x F(x)=y−x也叫做残差项,如果 x → y x\rightarrow y x→y的映射接近恒等映射,图1(b)中通过学习残差项也比图1(a)学习完整映射形式更加容易。
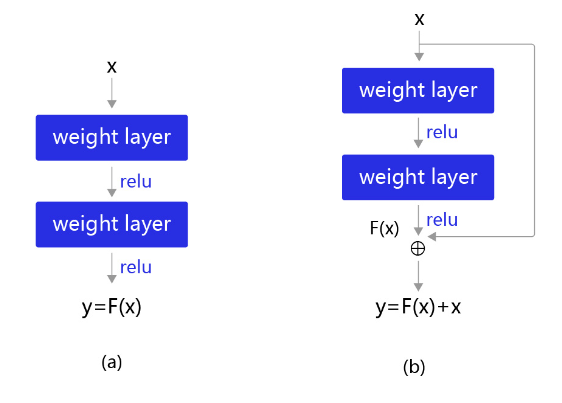
图1:残差块设计思想
图1(b)的结构是残差网络的基础,这种结构也叫做残差块(residual block)。输入x通过跨层连接,能更快的向前传播数据,或者向后传播梯度。残差块的具体设计方案如 图2 所示,这种设计方案也成称作瓶颈结构(BottleNeck)。
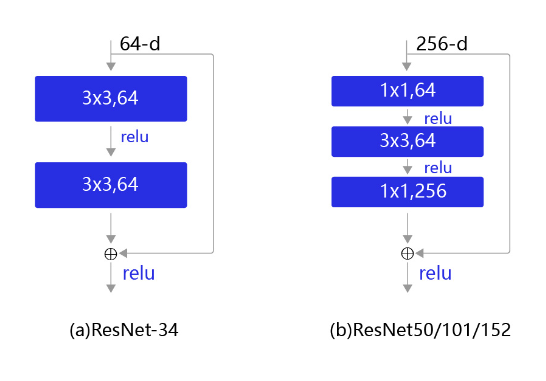
图2:残差块结构示意图
下图表示出了ResNet-50的结构,一共包含49层卷积和1层全连接,所以被称为ResNet-50。
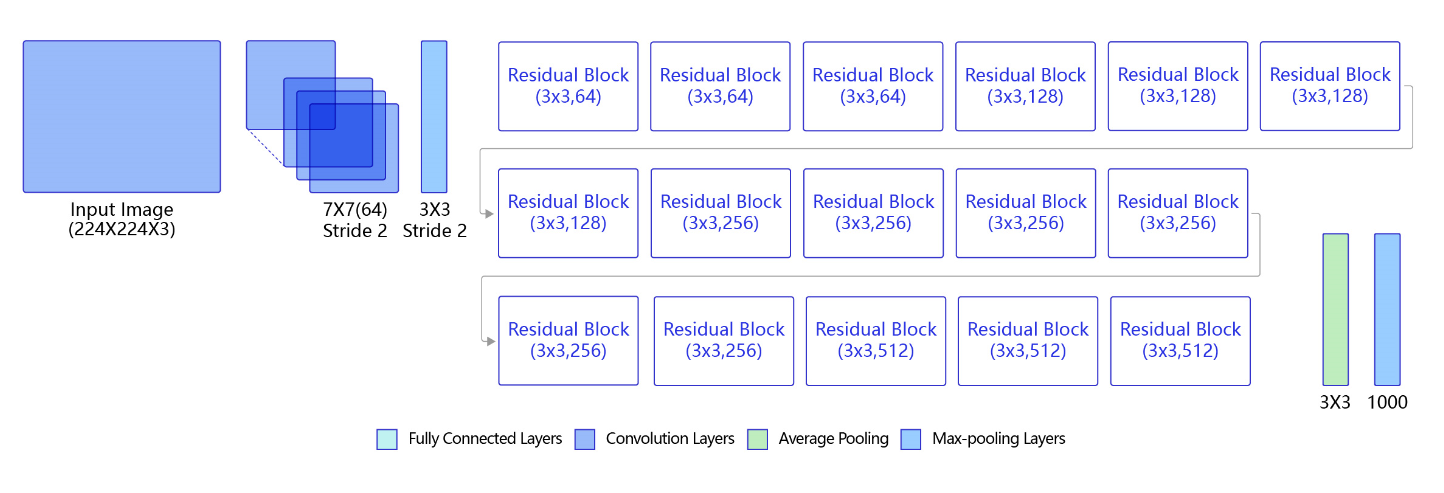
图3:ResNet-50模型网络结构示意图
使用PaddlePaddle定义ResNet网络
# -*- coding:utf-8 -*-
# ResNet模型代码
import numpy as np
import paddle
import paddle.fluid as fluid
from paddle.fluid.layer_helper import LayerHelper
from paddle.fluid.dygraph.nn import Conv2D, Pool2D, BatchNorm, Linear
from paddle.fluid.dygraph.base import to_variable
# ResNet中使用了BatchNorm层,在卷积层的后面加上BatchNorm以提升数值稳定性
# 定义卷积批归一化块
class ConvBNLayer(fluid.dygraph.Layer):
def __init__(self,
num_channels,
num_filters,
filter_size,
stride=1,
groups=1,
act=None):
"""
num_channels, 卷积层的输入通道数
num_filters, 卷积层的输出通道数
stride, 卷积层的步幅
groups, 分组卷积的组数,默认groups=1不使用分组卷积
act, 激活函数类型,默认act=None不使用激活函数
"""
super(ConvBNLayer, self).__init__()
# 创建卷积层
self._conv = Conv2D(
num_channels=num_channels,
num_filters=num_filters,
filter_size=filter_size,
stride=stride,
padding=(filter_size - 1) // 2,
groups=groups,
act=None,
bias_attr=False)
# 创建BatchNorm层
self._batch_norm = BatchNorm(num_filters, act=act)
def forward(self, inputs):
y = self._conv(inputs)
y = self._batch_norm(y)
return y
# 定义残差块
# 每个残差块会对输入图片做三次卷积,然后跟输入图片进行短接
# 如果残差块中第三次卷积输出特征图的形状与输入不一致,则对输入图片做1x1卷积,将其输出形状调整成一致
class BottleneckBlock(fluid.dygraph.Layer):
def __init__(self,
num_channels,
num_filters,
stride,
shortcut=True):
super(BottleneckBlock, self).__init__()
# 创建第一个卷积层 1x1
self.conv0 = ConvBNLayer(
num_channels=num_channels,
num_filters=num_filters,
filter_size=1,
act='relu')
# 创建第二个卷积层 3x3
self.conv1 = ConvBNLayer(
num_channels=num_filters,
num_filters=num_filters,
filter_size=3,
stride=stride,
act='relu')
# 创建第三个卷积 1x1,但输出通道数乘以4
self.conv2 = ConvBNLayer(
num_channels=num_filters,
num_filters=num_filters * 4,
filter_size=1,
act=None)
# 如果conv2的输出跟此残差块的输入数据形状一致,则shortcut=True
# 否则shortcut = False,添加1个1x1的卷积作用在输入数据上,使其形状变成跟conv2一致
if not shortcut:
self.short = ConvBNLayer(
num_channels=num_channels,
num_filters=num_filters * 4,
filter_size=1,
stride=stride)
self.shortcut = shortcut
self._num_channels_out = num_filters * 4
def forward(self, inputs):
y = self.conv0(inputs)
conv1 = self.conv1(y)
conv2 = self.conv2(conv1)
# 如果shortcut=True,直接将inputs跟conv2的输出相加
# 否则需要对inputs进行一次卷积,将形状调整成跟conv2输出一致
if self.shortcut:
short = inputs
else:
short = self.short(inputs)
y = fluid.layers.elementwise_add(x=short, y=conv2)
layer_helper = LayerHelper(self.full_name(), act='relu')
return layer_helper.append_activation(y)
# 定义ResNet模型
class ResNet(fluid.dygraph.Layer):
def __init__(self, layers=50, class_dim=1):
"""
layers, 网络层数,可以是50, 101或者152
class_dim,分类标签的类别数
"""
super(ResNet, self).__init__()
self.layers = layers
supported_layers = [50, 101, 152]
assert layers in supported_layers, \
"supported layers are {} but input layer is {}".format(supported_layers, layers)
if layers == 50:
#ResNet50包含多个模块,其中第2到第5个模块分别包含3、4、6、3个残差块
depth = [3, 4, 6, 3]
elif layers == 101:
#ResNet101包含多个模块,其中第2到第5个模块分别包含3、4、23、3个残差块
depth = [3, 4, 23, 3]
elif layers == 152:
#ResNet50包含多个模块,其中第2到第5个模块分别包含3、8、36、3个残差块
depth = [3, 8, 36, 3]
# 残差块中使用到的卷积的输出通道数
num_filters = [64, 128, 256, 512]
# ResNet的第一个模块,包含1个7x7卷积,后面跟着1个最大池化层
self.conv = ConvBNLayer(
num_channels=3,
num_filters=64,
filter_size=7,
stride=2,
act='relu')
self.pool2d_max = Pool2D(
pool_size=3,
pool_stride=2,
pool_padding=1,
pool_type='max')
# ResNet的第二到第五个模块c2、c3、c4、c5
self.bottleneck_block_list = []
num_channels = 64
for block in range(len(depth)):
shortcut = False
for i in range(depth[block]):
bottleneck_block = self.add_sublayer(
'bb_%d_%d' % (block, i),
BottleneckBlock(
num_channels=num_channels,
num_filters=num_filters[block],
stride=2 if i == 0 and block != 0 else 1, # c3、c4、c5将会在第一个残差块使用stride=2;其余所有残差块stride=1
shortcut=shortcut))
num_channels = bottleneck_block._num_channels_out
self.bottleneck_block_list.append(bottleneck_block)
shortcut = True
# 在c5的输出特征图上使用全局池化
self.pool2d_avg = Pool2D(pool_size=7, pool_type='avg', global_pooling=True)
# stdv用来作为全连接层随机初始化参数的方差
import math
stdv = 1.0 / math.sqrt(2048 * 1.0)
# 创建全连接层,输出大小为类别数目
self.out = Linear(input_dim=2048, output_dim=class_dim,
param_attr=fluid.param_attr.ParamAttr(
initializer=fluid.initializer.Uniform(-stdv, stdv)))
def forward(self, inputs):
y = self.conv(inputs)
y = self.pool2d_max(y)
for bottleneck_block in self.bottleneck_block_list:
y = bottleneck_block(y)
y = self.pool2d_avg(y)
y = fluid.layers.reshape(y, [y.shape[0], -1])
y = self.out(y)
return y
训练过程
训练过程设置epoch_num为10次,
# 定义训练过程
def train(model):
with fluid.dygraph.guard():
print('start training ... ')
model.train()
epoch_num = 10 # 1.修改这里的epoch_num 由1修改为10
# 2.1. 定义学习率,并加载优化器参数到模型中,【参考 课节9,项目9. 模型加载及恢复训练-->可视化分析】
# 眼疾数据,包含1200个受试者的眼底视网膜图片,训练、验证和测试数据集各400张
BATCH_SIZE = 10
# total_steps = (int(400//BATCH_SIZE) + 1) * epoch_num
total_steps = (int(400//BATCH_SIZE) + 1) * 2.5
lr = fluid.dygraph.PolynomialDecay(0.005, total_steps, 0.001)
# 3.1. 添加迭代记数器及迭代记数列表、loss列表 以方便绘制图形
iter_count = 0
iters = []
losses_train = [] # 训练的loss
# 定义优化器
# opt = fluid.optimizer.Momentum(learning_rate=0.001, momentum=0.9, parameter_list=model.parameters())
# 2.2. 将固定学习率,修改为动态学习率
opt = fluid.optimizer.Momentum(learning_rate=lr, momentum=0.9, parameter_list=model.parameters())
# 定义数据读取器,训练数据读取器和验证数据读取器
train_loader = data_loader(DATADIR, batch_size=10, mode='train')
valid_loader = valid_data_loader(DATADIR2, CSVFILE)
for epoch in range(epoch_num):
for batch_id, data in enumerate(train_loader()):
x_data, y_data = data
img = fluid.dygraph.to_variable(x_data)
label = fluid.dygraph.to_variable(y_data)
# 运行模型前向计算,得到预测值
logits = model(img)
# 进行loss计算
loss = fluid.layers.sigmoid_cross_entropy_with_logits(logits, label)
avg_loss = fluid.layers.mean(loss)
if batch_id % 10 == 0:
print("epoch: {}, batch_id: {}, loss is: {}".format(epoch, batch_id, avg_loss.numpy()))
# 3.2. 添加迭代次数记数并填充集合
iters.append(iter_count)
losses_train.append(avg_loss.numpy())
iter_count += 10
# 反向传播,更新权重,清除梯度
avg_loss.backward()
opt.minimize(avg_loss)
model.clear_gradients()
model.eval()
accuracies = []
losses = []
for batch_id, data in enumerate(valid_loader()):
x_data, y_data = data
img = fluid.dygraph.to_variable(x_data)
label = fluid.dygraph.to_variable(y_data)
# 运行模型前向计算,得到预测值
logits = model(img)
# 二分类,sigmoid计算后的结果以0.5为阈值分两个类别
# 计算sigmoid后的预测概率,进行loss计算
pred = fluid.layers.sigmoid(logits)
loss = fluid.layers.sigmoid_cross_entropy_with_logits(logits, label)
# 计算预测概率小于0.5的类别
pred2 = pred * (-1.0) + 1.0
# 得到两个类别的预测概率,并沿第一个维度级联
pred = fluid.layers.concat([pred2, pred], axis=1)
acc = fluid.layers.accuracy(pred, fluid.layers.cast(label, dtype='int64'))
accuracies.append(acc.numpy())
losses.append(loss.numpy())
print("[validation] accuracy/loss: {}/{}".format(np.mean(accuracies), np.mean(losses)))
model.train()
# save params of model
fluid.save_dygraph(model.state_dict(), 'palm')
# save optimizer state
fluid.save_dygraph(opt.state_dict(), 'palm')
# 4.3. 调用绘制 loss 变化曲线函数进行绘制
plot_change_loss(iters, losses_train)
画出训练图像,代码如下:
import matplotlib.pyplot as plt
%matplotlib inline
'''
@param
iters: 横坐标
losses_train: 训练losses
'''
def plot_change_loss(iters, losses_train):
#画出训练过程中Loss的变化曲线
plt.figure()
plt.title("train loss", fontsize=24)
plt.xlabel("iter", fontsize=14)
plt.ylabel("loss", fontsize=14)
plt.plot(iters, losses_train,color='red',label='train loss')
plt.grid()
plt.show()
绘制的loss下降图像如下:
 由图像可以看出,总体来说loss呈现下降的趋势,但是在某次迭代训练过程中,仍然出现了抖动,随机梯度下降的随机性导致了每一步是局部最优而不是全局最优。可以尝试增大batch_size。
由图像可以看出,总体来说loss呈现下降的趋势,但是在某次迭代训练过程中,仍然出现了抖动,随机梯度下降的随机性导致了每一步是局部最优而不是全局最优。可以尝试增大batch_size。
参考文献
[1] Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for im- age recognition. In Proc. of the IEEE Conference on Computer Vision and Pattern Recognition, pages 770–778, 2016a.
[2] https://blog.csdn.net/songfeng163/article/details/108176255
[3] 百度架构师手把手带你实践深度学习–计算机视觉(上):神经网络基础。点击这里进入















 555
555











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









