






本文的算法细节及推导可以参考Sebastian Thrun的《概率机器人》中占用栅格地图构建部分。
1. 导入所需要的库
import numpy as np
import math
import matplotlib.pyplot as plt
import matplotlib.animation as anim
from IPython.display import HTML
2. 反演测量模型的实现
在栅格地图的构建中,反演测量模型即根据当下的观测推出栅格有被占用(有障碍)的概率。
# Calculates the inverse measurement model for a laser scanner.
# It identifies three regions. The first where no information is available occurs
# outside of the scanning arc. The second where objects are likely to exist, at the
# end of the range measurement within the arc. The third are where objects are unlikely
# to exist, within the arc but with less distance than the range measurement.、
# num_rows和num_cols是栅格的参数,x、y和theta是车辆的位姿,meas_phi和meas_r是基于车辆的测量值,
# rmax是激光雷达的最大量程,alpha和beta是扇形区域的参数
def inverse_scanner(num_rows, num_cols, x, y, theta, meas_phi, meas_r, rmax, alpha, beta):
m = np.zeros((M, N))
for i in range(num_rows):
for j in range(num_cols):
# Find range and bearing relative to the input state (x, y, theta).
r = math.sqrt((i - x)**2 + (j - y)**2)
phi = (math.atan2(j - y, i - x) - theta + math.pi) % (2 * math.pi) - math.pi
# Find the range measurement associated with the relative bearing.
k = np.argmin(np.abs(np.subtract(phi, meas_phi)))
# If the range is greater than the maximum sensor range, or behind our range
# measurement, or is outside of the field of view of the sensor, then no
# new information is available.
if (r > min(rmax, meas_r[k] + alpha / 2.0)) or (abs(phi - meas_phi[k]) > beta / 2.0):
m[i, j] = 0.5
# If the range measurement lied within this cell, it is likely to be an object.
elif (meas_r[k] < rmax) and (abs(r - meas_r[k]) < alpha / 2.0):
m[i, j] = 0.7
# If the cell is in front of the range measurement, it is likely to be empty.
elif r < meas_r[k]:
m[i, j] = 0.3
return m
3. 计算每个光束的range值
# Generates range measurements for a laser scanner based on a map, vehicle position,
# and sensor parameters.
# Uses the ray tracing algorithm.
# true_map是真实的地图,X代表车辆的状态向量,meas_phi代表测量的角度值,rmax代表激光雷达的最大量程
# 返回的是对应每个角度值的range值
def get_ranges(true_map, X, meas_phi, rmax):
(M, N) = np.shape(true_map)
x = X[0]
y = X[1]
theta = X[2]
meas_r = rmax * np.ones(meas_phi.shape)
# Iterate for each measurement bearing.
for i in range(len(meas_phi)):
# Iterate over each unit step up to and including rmax.
for r in range(1, rmax+1):
# Determine the coordinates of the cell.
xi = int(round(x + r * math.cos(theta + meas_phi[i])))
yi = int(round(y + r * math.sin(theta + meas_phi[i])))
# If not in the map, set measurement there and stop going further.
if (xi <= 0 or xi >= M-1 or yi <= 0 or yi >= N-1):
meas_r[i] = r
break
# If in the map, but hitting an obstacle, set the measurement range
# and stop ray tracing.
elif true_map[int(round(xi)), int(round(yi))] == 1:
meas_r[i] = r
break
return meas_r
4. 初始化
# Simulation time initialization.
T_MAX = 150
time_steps = np.arange(T_MAX)# 以步长1生成一个序列
# Initializing the robot's location.
x_0 = [30, 30, 0]
# The sequence of robot motions.
u = np.array([[3, 0, -3, 0], [0, 3, 0, -3]])
u_i = 1
# Robot sensor rotation command
w = np.multiply(0.3, np.ones(len(time_steps)))
# True map (note, columns of map correspond to y axis and rows to x axis, so
# robot position x = x(1) and y = x(2) are reversed when plotted to match
M = 50
N = 60
true_map = np.zeros((M, N))
true_map[0:10, 0:10] = 1
true_map[30:35, 40:45] = 1
true_map[3:6,40:60] = 1;
true_map[20:30,25:29] = 1;
true_map[40:50,5:25] = 1;
# Initialize the belief map.
# We are assuming a uniform prior.
m = np.multiply(0.5, np.ones((M, N)))
# Initialize the log odds ratio.
L0 = np.log(np.divide(m, np.subtract(1, m)))
L = L0
# Parameters for the sensor model.
meas_phi = np.arange(-0.4, 0.4, 0.05)# 激光雷达的扫描角度
rmax = 30 # Max beam range.
alpha = 1 # Width of an obstacle (distance about measurement to fill in).
beta = 0.05 # Angular width of a beam.
# Initialize the vector of states for our simulation.
x = np.zeros((3, len(time_steps)))# x不只是三维的,还加了一个时间维度在里面
x[:, 0] = x_0
5. 主循环
%%capture
# Intitialize figures.
map_fig = plt.figure()
map_ax = map_fig.add_subplot(111)
map_ax.set_xlim(0, N)
map_ax.set_ylim(0, M)
invmod_fig = plt.figure()
invmod_ax = invmod_fig.add_subplot(111)
invmod_ax.set_xlim(0, N)
invmod_ax.set_ylim(0, M)
belief_fig = plt.figure()
belief_ax = belief_fig.add_subplot(111)
belief_ax.set_xlim(0, N)
belief_ax.set_ylim(0, M)
meas_rs = []
meas_r = get_ranges(true_map, x[:, 0], meas_phi, rmax)
meas_rs.append(meas_r)
invmods = []
invmod = inverse_scanner(M, N, x[0, 0], x[1, 0], x[2, 0], meas_phi, meas_r, \
rmax, alpha, beta)
invmods.append(invmod)
ms = []
ms.append(m)
# Main simulation loop.
for t in range(1, len(time_steps)):
# Perform robot motion.
move = np.add(x[0:2, t-1], u[:, u_i])
# If we hit the map boundaries, or a collision would occur, remain still.
# 直到找到可行的位置,就往那个位置去
if (move[0] >= M - 1) or (move[1] >= N - 1) or (move[0] <= 0) or (move[1] <= 0) \
or true_map[int(round(move[0])), int(round(move[1]))] == 1:
x[:, t] = x[:, t-1]
u_i = (u_i + 1) % 4
else:
x[0:2, t] = move
x[2, t] = (x[2, t-1] + w[t]) % (2 * math.pi)# 旋转一定的角度,模拟激光雷达的旋转
# TODO Gather the measurement range data, which we will convert to occupancy probabilities
# using our inverse measurement model.
# meas_r = ...
# 根据地图和当下时间步长的车辆位姿,光束角度和激光雷达的最大范围得出每个角度的range值
meas_r = get_ranges(true_map, x[:, t], meas_phi, rmax)
meas_rs.append(meas_r)
# TODO Given our range measurements and our robot location, apply our inverse scanner model
# to get our measure probabilities of occupancy.
# invmod = ...
# 根据反演测量模型得出当下时间步长的测量下每个栅格的占据概率
invmod = inverse_scanner(M, N, x[0, t], x[1, t], x[2, t], meas_phi, meas_r, \
rmax, alpha, beta)
invmods.append(invmod)
# TODO Calculate and update the log odds of our occupancy grid, given our measured
# occupancy probabilities from the inverse model.
# L = ...
# 利用二值贝叶斯滤波算法更新后验概率
L = L + np.log(np.divide(invmod, np.subtract(1, invmod))) -L0
# TODO Calculate a grid of probabilities from the log odds.
# m = ...
# 通过L计算出每个栅格最终的概率
m = np.divide(1,np.add(1, np.exp(L)))
m = np.subtract(1, m)
ms.append(m)
6. 仿真设置
# Ouput for grading. Do not modify this code!
m_f = ms[-1]
print("{}".format(m_f[40, 10]))
print("{}".format(m_f[30, 40]))
print("{}".format(m_f[35, 40]))
print("{}".format(m_f[0, 50]))
print("{}".format(m_f[10, 5]))
print("{}".format(m_f[20, 15]))
print("{}".format(m_f[25, 50]))
def map_update(i):
map_ax.clear()
map_ax.set_xlim(0, N)
map_ax.set_ylim(0, M)
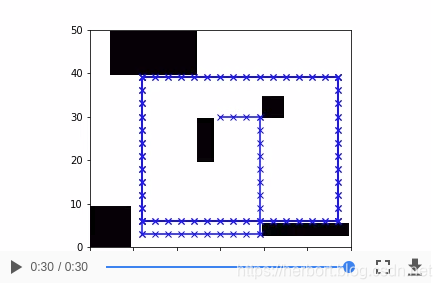
map_ax.imshow(np.subtract(1, true_map), cmap='gray', origin='lower', vmin=0.0, vmax=1.0)
x_plot = x[1, :i+1]
y_plot = x[0, :i+1]
map_ax.plot(x_plot, y_plot, "bx-")
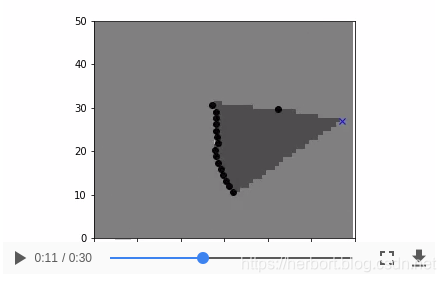
def invmod_update(i):
invmod_ax.clear()
invmod_ax.set_xlim(0, N)
invmod_ax.set_ylim(0, M)
invmod_ax.imshow(invmods[i], cmap='gray', origin='lower', vmin=0.0, vmax=1.0)
for j in range(len(meas_rs[i])):
invmod_ax.plot(x[1, i] + meas_rs[i][j] * math.sin(meas_phi[j] + x[2, i]), \
x[0, i] + meas_rs[i][j] * math.cos(meas_phi[j] + x[2, i]), "ko")
invmod_ax.plot(x[1, i], x[0, i], 'bx')
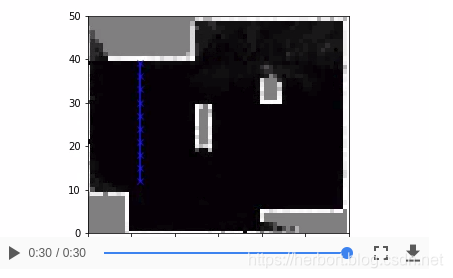
def belief_update(i):
belief_ax.clear()
belief_ax.set_xlim(0, N)
belief_ax.set_ylim(0, M)
belief_ax.imshow(ms[i], cmap='gray', origin='lower', vmin=0.0, vmax=1.0)
belief_ax.plot(x[1, max(0, i-10):i], x[0, max(0, i-10):i], 'bx-')
map_anim = anim.FuncAnimation(map_fig, map_update, frames=len(x[0, :]), repeat=False)
invmod_anim = anim.FuncAnimation(invmod_fig, invmod_update, frames=len(x[0, :]), repeat=False)
belief_anim = anim.FuncAnimation(belief_fig, belief_update, frames=len(x[0, :]), repeat=False)
7. 仿真结果
7.1 运行轨迹
HTML(map_anim.to_html5_video())
7.2 反演测量模型
HTML(invmod_anim.to_html5_video())
7.3 占用栅格地图
HTML(belief_anim.to_html5_video())

















 1043
1043

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









