







前言
此篇为我个人工作时的学习笔记,其中包括STM32CubeX IDE的使用方法,以及STM32F405RGT6 CAN通讯的相关知识,和个人遇到的问题。
本次开发使用到的是基于STM32F405RGT6芯片的PCAN CAN卡的二次开发,通过ID筛选并转发,实现CAN网关功能。
一、STM32Cube IDE配置
1.新建项目File > new > STM32 project
2.在下面界面Series中选择芯片型号

3.配置SYS(烧录方式)
SYS > Debug > Serial Wire(我是用串口烧录的)
Timebase Source> SysTick(时基-系统时钟)

4.开启外设时钟
RCC > High Speed Clock (HSE) > Crystal/Ceramic Resonator

5.在Clock Configuration界面设置时钟分频

这里我使用的外部晶振频率8Mhz,所以最左边输入频率改为8,否则会引起CAN通讯位填充错误,具体原理有懂得大佬还请指教,最后输出的频率我定为低速时钟42Mhz,高速时钟为84Mhz,到此时钟部分设置完毕。

6.配置CAN节点,设置工作模式和波特率
- 确定CAN1节点的引脚,我这里是复用了芯片的PB8和PB9引脚分别为RX和TX,STM32F405的正常CAN1引脚为PA10 PA11。
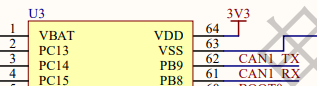
- 按照原理图将PB8 PB9使能(要先进行引脚使能,Mode会自动打开,如果先“Activated”就会导致打开PA10 PA11,导致无法通讯)
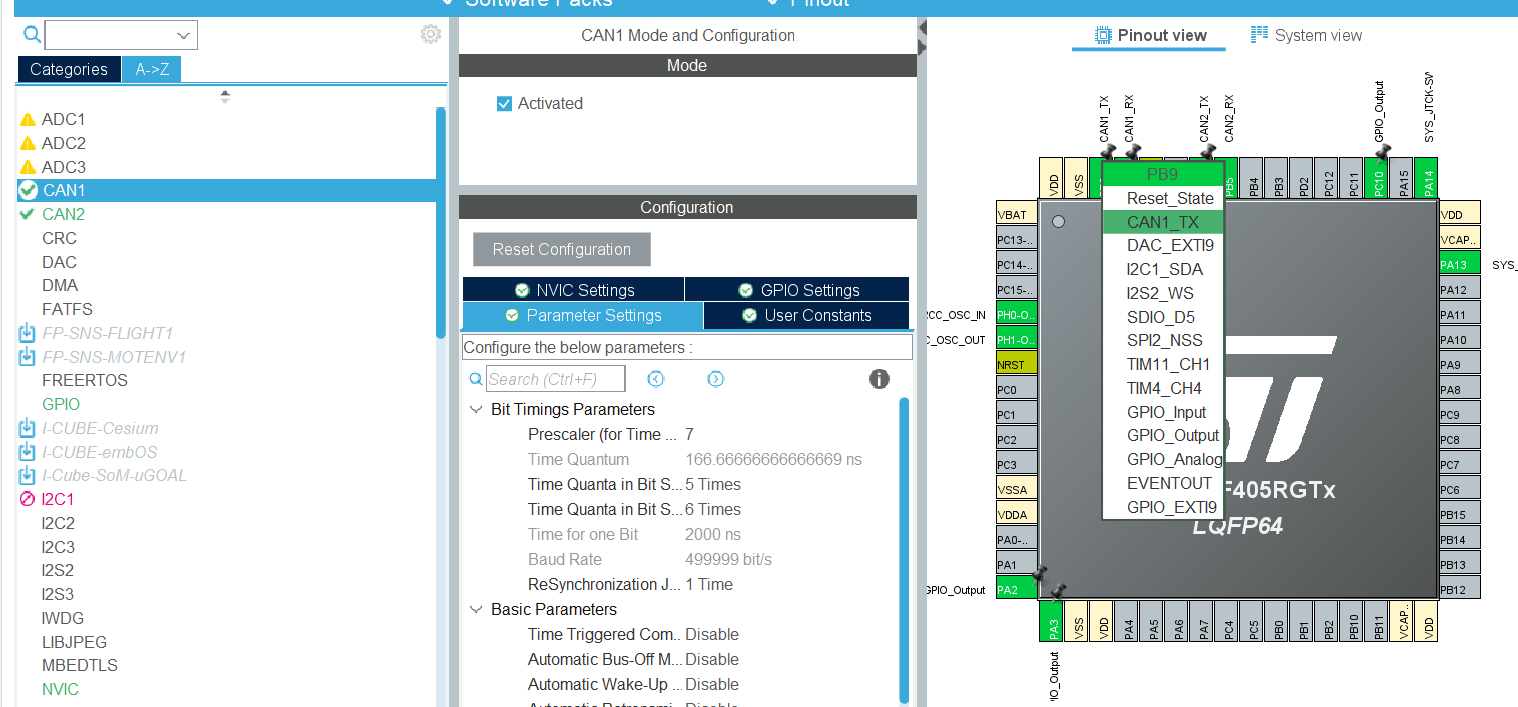
- 配置CAN通讯波特率
波特率计算公式 :时钟频率/(TQ1+TQ2+SJW)=波特率,带入公式配置出500khz- 下面其他初始化配置暂时不用管
- 打开中断
NVIC Setting > CAN1 R0 interrupt
7.上面配置完成,点击 生成代码。
生成代码。
二、代码修改
1.CAN相关代码
can.c
#include "can.h"
#include <string.h>
/* USER CODE BEGIN 0 */
CAN_TxHeaderTypeDef TxMessage1; //GW_1
CAN_TxHeaderTypeDef TxMessage2; //GW_2
CAN_TxHeaderTypeDef TxMessage3; //GW_3
CAN_TxHeaderTypeDef TxMessage4; //GW_4
CAN_RxHeaderTypeDef RxMessage1;
CAN_RxHeaderTypeDef RxMessage2;
CAN_HandleTypeDef hcan1;
CAN_HandleTypeDef hcan2;
CAN_FilterTypeDef CAN_FilterInitStructure1;
CAN_FilterTypeDef CAN_FilterInitStructure2;
void MX_CAN1_Init(void)
{
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 7;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_5TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_6TQ;
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = DISABLE;
hcan1.Init.AutoWakeUp = DISABLE;
hcan1.Init.AutoRetransmission = DISABLE;
hcan1.Init.ReceiveFifoLocked = DISABLE;
hcan1.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN1_Init 2 */
CAN_FilterInitStructure1.FilterActivation = ENABLE;//使能过滤器
CAN_FilterInitStructure1.FilterBank = 1;//指定过滤器为1
CAN_FilterInitStructure1.FilterMode = CAN_FILTERMODE_IDMASK;//指定过滤器为标识符屏蔽位模式
CAN_FilterInitStructure1.FilterScale = CAN_FILTERSCALE_32BIT;//过滤器位宽为32位
CAN_FilterInitStructure1.FilterFIFOAssignment = CAN_FILTER_FIFO0;//设定了指向过滤器的FIFO
CAN_FilterInitStructure1.FilterIdHigh =0x0000 ;//要过滤的ID高位
CAN_FilterInitStructure1.FilterIdLow = 0x0000;//要过滤的ID低位
CAN_FilterInitStructure1.FilterMaskIdHigh = 0x0000;//过滤器屏蔽标识符的高16位值
CAN_FilterInitStructure1.FilterMaskIdLow = 0x0000; //过滤器屏蔽标识符的低16位值
HAL_CAN_ConfigFilter(&hcan1,&CAN_FilterInitStructure1);
}
static uint32_t HAL_RCC_CAN1_CLK_ENABLED=0;
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(canHandle->Instance==CAN1)
{
HAL_RCC_CAN1_CLK_ENABLED++;
if(HAL_RCC_CAN1_CLK_ENABLED==1){
__HAL_RCC_CAN1_CLK_ENABLE();
}
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_8|GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* CAN1 interrupt Init */
HAL_NVIC_SetPriority(CAN1_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(CAN1_RX0_IRQn);
}
else if(canHandle->Instance==CAN2)
{
/* CAN2 clock enable */
__HAL_RCC_CAN2_CLK_ENABLE();
HAL_RCC_CAN1_CLK_ENABLED++;
if(HAL_RCC_CAN1_CLK_ENABLED==1){
__HAL_RCC_CAN1_CLK_ENABLE();
}
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_5|GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN2;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* CAN2 interrupt Init */
HAL_NVIC_SetPriority(CAN2_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(CAN2_RX0_IRQn); }
}
void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspDeInit 0 */
/* USER CODE END CAN1_MspDeInit 0 */
/* Peripheral clock disable */
HAL_RCC_CAN1_CLK_ENABLED--;
if(HAL_RCC_CAN1_CLK_ENABLED==0){
__HAL_RCC_CAN1_CLK_DISABLE();
}
/**CAN1 GPIO Configuration
PB8 ------> CAN1_RX
PB9 ------> CAN1_TX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_8|GPIO_PIN_9);
/* CAN1 interrupt Deinit */
HAL_NVIC_DisableIRQ(CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspDeInit 1 */
/* USER CODE END CAN1_MspDeInit 1 */
}
else if(canHandle->Instance==CAN2)
{
/* USER CODE BEGIN CAN2_MspDeInit 0 */
/* USER CODE END CAN2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_CAN2_CLK_DISABLE();
HAL_RCC_CAN1_CLK_ENABLED--;
if(HAL_RCC_CAN1_CLK_ENABLED==0){
__HAL_RCC_CAN1_CLK_DISABLE();
}
/**CAN2 GPIO Configuration
PB5 ------> CAN2_RX
PB6 ------> CAN2_TX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_5|GPIO_PIN_6);
/* CAN2 interrupt Deinit */
HAL_NVIC_DisableIRQ(CAN2_RX0_IRQn);
/* USER CODE BEGIN CAN2_MspDeInit 1 */
/* USER CODE END CAN2_MspDeInit 1 */
}
}
/* USER CODE END 1 */
can.h
#ifndef __CAN_H__
#define __CAN_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
extern CAN_HandleTypeDef hcan1;
extern CAN_HandleTypeDef hcan2;
extern CAN_TxHeaderTypeDef TxMessage1;
extern CAN_TxHeaderTypeDef TxMessage2;
extern CAN_TxHeaderTypeDef TxMessage3;
extern CAN_TxHeaderTypeDef TxMessage4;
extern CAN_RxHeaderTypeDef RxMessage1;
extern CAN_RxHeaderTypeDef RxMessage2;
typedef struct
{
uint8_t Data[8];
}CAN_RecvMsg;
void MX_CAN1_Init(void);
void MX_CAN2_Init(void);
void CAN1_Config(void);
void CAN2_Config (void);
void CAN_TRANSMIT1(void);
void CAN_TRANSMIT2(void);
#ifdef __cplusplus
}
#endif
#endif
2.主函数部分
main.c
#include "main.h"
#include "can.h"
#include "gpio.h"
uint8_t TxData[8] = {0};
uint32_t TxMailbox;
void SystemClock_Config(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_CAN1_Init();
if(HAL_CAN_Start(&hcan1)!=HAL_OK)
{
Error_Handler();
}
/* USER CODE END 2 */
TxMessage1.StdId = 0x00;
TxMessage1.ExtId = 0x18f0010b;
TxMessage1.RTR = CAN_RTR_DATA;
TxMessage1.IDE = CAN_ID_EXT;
TxMessage1.DLC = 8;
TxMessage1.TransmitGlobalTime = DISABLE;
TxMessage2.StdId = 0x00;
TxMessage2.ExtId = 0x18febf0b;
TxMessage2.RTR = CAN_RTR_DATA;
TxMessage2.IDE = CAN_ID_EXT;
TxMessage2.DLC = 8;
TxMessage2.TransmitGlobalTime = DISABLE;
TxMessage3.StdId = 0x00;
TxMessage3.ExtId = 0x18fef100;
TxMessage3.RTR = CAN_RTR_DATA;
TxMessage3.IDE = CAN_ID_EXT;
TxMessage3.DLC = 8;
TxMessage3.TransmitGlobalTime = DISABLE;
TxMessage4.StdId = 0x00;
TxMessage4.ExtId = 0x18fed900;
TxMessage4.RTR = CAN_RTR_DATA;
TxMessage4.IDE = CAN_ID_EXT;
TxMessage4.DLC = 8;
TxMessage4.TransmitGlobalTime = DISABLE;
TxMessage4.StdId = 0x00;
TxMessage4.ExtId = 0x18fed930;
TxMessage4.RTR = CAN_RTR_DATA;
TxMessage4.IDE = CAN_ID_EXT;
TxMessage4.DLC = 8;
TxMessage4.TransmitGlobalTime = DISABLE;
// uint8_t tdata[8] = {0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77};
uint8_t adata[8] = {0};
uint32_t pTxMailbox = 0;
while (1)
{
if(HAL_CAN_GetRxMessage(&hcan1, CAN_RX_FIFO0, &RxMessage1, adata)!=1)
{
if(RxMessage1.ExtId == 0x18f0010b)
{
HAL_CAN_AddTxMessage(&hcan1, &TxMessage1, adata, &pTxMailbox);
}
else if(RxMessage1.ExtId == 0x18febf0b)
{
HAL_CAN_AddTxMessage(&hcan1, &TxMessage2, adata, &pTxMailbox);
}
else if(RxMessage1.ExtId == 0x18fef100)
{
HAL_CAN_AddTxMessage(&hcan1, &TxMessage3, adata, &pTxMailbox);
}
else if(RxMessage1.ExtId == 0x18fed900)
{
HAL_CAN_AddTxMessage(&hcan1, &TxMessage4, adata, &pTxMailbox);
}
}
}
}
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
Error_Handler();
}
}
void Error_Handler(void)
{
__disable_irq();
while (1)
{
}
}
#ifdef USE_FULL_ASSERT
void assert_failed(uint8_t *file, uint32_t line)
}
#endif /* USE_FULL_ASSERT */
main.h
#ifndef __MAIN_H
#define __MAIN_H
#ifdef __cplusplus
extern "C" {
#endif
#include "stm32f4xx_hal.h"
void Error_Handler(void);
#ifdef __cplusplus
}
#endif
#endif /* __MAIN_H */
烧录验证
将代码烧录到板子上验证功能
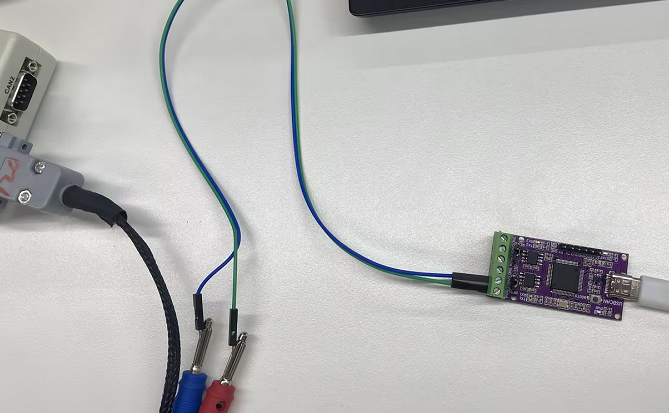

使用DCB方式发送报文,可以看到发送了六条报文,只接收四条所需的,功能实现!

















 1104
1104











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











