







张正友标定法也称棋盘格标定法,是指张正友教授1998年提出的单平面棋盘格的摄像机标定方法。该方法介于传统的标定方法和自标定方法之间,使用简单实用性强,有以下优点:
- 不需要额外的器材,一张打印的棋盘格即可。
- 标定简单,相机和标定板可以任意放置。
- 角点明显,标定的精度高。
1.1 相机的内参矩阵
设P=(X,Y,Z)为场景中的一点,在针孔相机模型中,其要经过以下几个变换,最终变为二维图像上的像点p=(μ,ν):
- 将P从世界坐标系通过刚体变换(旋转和平移)变换到相机坐标系,这个变换过程使用的是相机间的相对位置,也就是相机的外参数。
- 从相机坐标系,通过透视投影变换到相机的成像平面上的像点p=(x,y)。
- 将像点p从成像坐标系,通过缩放和平移变换到像素坐标系上点p=(μ,ν)。
相机将场景中的三维点变换为图像中的二维点,也就是各个坐标系变换的组合,可将上面的变换过程整理为矩阵相乘的形式:
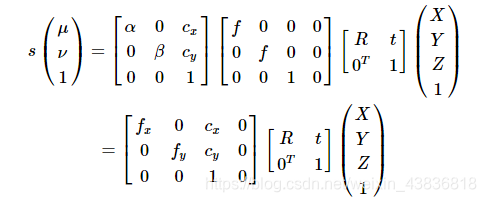
将矩阵K称为相机的内参数,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









