






本文总结python常见的归一化方法,解决如何理解和代码实现的问题
1、如何理解各种Normalization
1.1 相关论文
1、Batch Normalization 2015年
https://arxiv.org/pdf/1502.03167.pdf
2、Layer Normalizaiton 2016年
https://arxiv.org/pdf/1607.06450v1.pdf
3、Instance Normalization 2017年
https://arxiv.org/pdf/1607.08022.pdf
https://github.com/DmitryUlyanov/texture_nets
4、Group Normalization 2018年
https://arxiv.org/pdf/1803.08494.pdf
5、 Switchable Normalization 2019年
https://arxiv.org/pdf/1806.10779.pdf
https://github.com/switchablenorms/Switchable-Normalization
1.2 理解
如上,归一化层,目前主要有这几个方法,Batch Normalization(2015年)、Layer Normalization(2016年)、Instance Normalization(2017年)、Group Normalization(2018年)、Switchable Normalization(2018年)
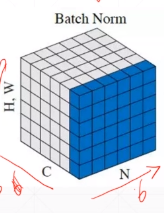
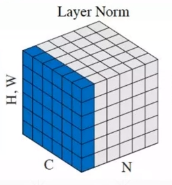
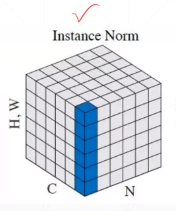
将输入的图像shape记为[N, C, H, W],各种Normalization如下:
(1) Batch Normalization
一个Batch的图像数据shape为[样本数N, 通道数C, 高度H, 宽度W],将其最后两个维度flatten,得到的是[N, C, H*W],标准的Batch Normalization就是在通道Channel这个维度上进行移动,对所有样本的所有值求均值和方差,所以有几个通道,得到的就是几个均值和方差,如下图:
公式:

(2)Layer Normalization
Layer Normalization是在实例即样本N的维度上滑动,对每个样本的所有通道的所有值求均值和方差,所以一个Batch有几个样本实例,得到的就是几个均值和方差。
公式:
(3)Instance Normalization
Instance Normalization是在样本N和通道C两个维度上滑动,对Batch中的N个样本里的每个样本n,和C个通道里的每个样本c,其组合[n, c]求对应的所有值的均值和方差,所以得到的是N⋅C个均值和方差。

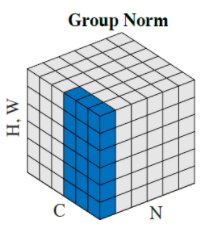
(4) Group Normalization
主要是针对Batch Normalization对小batchsize效果差,GN将channel方向分group,然后每个group内做归一化,算(C//G)HW的均值,这样与batchsize无关,不受其约束。
公式:

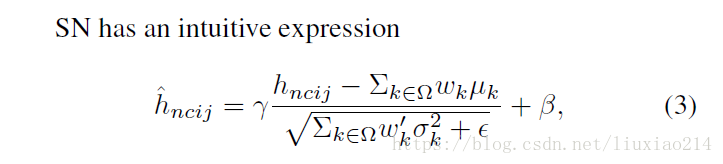
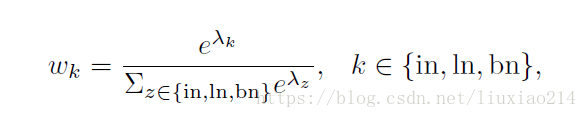
(5) Switchable Normalization
第一,归一化虽然提高模型泛化能力,然而归一化层的操作是人工设计的。在实际应用中,解决不同的问题原则上需要设计不同的归一化操作,并没有一个通用的归一化方法能够解决所有应用问题;
第二,一个深度神经网络往往包含几十个归一化层,通常这些归一化层都使用同样的归一化操作,因为手工为每一个归一化层设计操作需要进行大量的实验。
因此作者提出自适配归一化方法——Switchable Normalization(SN)来解决上述问题。与强化学习不同,SN使用可微分学习,为一个深度网络中的每一个归一化层确定合适的归一化操作。

这几个方法主要的区别如下:
- batchNorm是在batch上,对NHW做归一化,对小batchsize效果不好;
- layerNorm在通道方向上,对CHW归一化,主要对RNN作用明显;
- instanceNorm在图像像素上,对HW做归一化,用在风格化迁移;
- GroupNorm将channel分组,然后再做归一化;
- SwitchableNorm是将BN、LN、IN结合,赋予权重,让网络自己去学习归一化层应该使用什么方法。
2 代码实现
2.1 BatchNorm
torch.nn.BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
torch.nn.BatchNorm3d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
参数:
num_features: 来自期望输入的特征数,该期望输入的大小为’batch_size x num_features [x
width]’ eps: 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。 momentum:
动态均值和动态方差所使用的动量。默认为0.1。 affine: 布尔值,当设为true,给该层添加可学习的仿射变换参数。
track_running_stats:布尔值,当设为true,记录训练过程中的均值和方差;
import numpy as np
def Batchnorm(x, gamma, beta, bn_param):
# x_shape:[B, C, H, W]
running_mean = bn_param['running_mean']
running_var = bn_param['running_var']
results = 0.
eps = 1e-5
x_mean = np.mean(x, axis=(0, 2, 3), keepdims=True)
x_var = np.var(x, axis=(0, 2, 3), keepdims=True0)
x_normalized = (x - x_mean) / np.sqrt(x_var + eps)
results = gamma * x_normalized + beta
# 因为在测试时是单个图片测试,这里保留训练时的均值和方差,用在后面测试时用
running_mean = momentum * running_mean + (1 - momentum) * x_mean
running_var = momentum * running_var + (1 - momentum) * x_var
bn_param['running_mean'] = running_mean
bn_param['running_var'] = running_var
return results, bn_param
2.2 LayerNorm
torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True)
参数:
normalized_shape: 输入尺寸
[∗×normalized_shape[0]×normalized_shape[1]×…×normalized_shape[−1]]
eps: 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。
elementwise_affine: 布尔值,当设为true,给该层添加可学习的仿射变换参数。
def Layernorm(x, gamma, beta):
# x_shape:[B, C, H, W]
results = 0.
eps = 1e-5
x_mean = np.mean(x, axis=(1, 2, 3), keepdims=True)
x_var = np.var(x, axis=(1, 2, 3), keepdims=True0)
x_normalized = (x - x_mean) / np.sqrt(x_var + eps)
results = gamma * x_normalized + beta
return results
2.3 InstanceNorm
torch.nn.InstanceNorm1d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
torch.nn.InstanceNorm2d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
torch.nn.InstanceNorm3d(num_features, eps=1e-05, momentum=0.1, affine=False, track_running_stats=False)
def Instancenorm(x, gamma, beta):
# x_shape:[B, C, H, W]
results = 0.
eps = 1e-5
x_mean = np.mean(x, axis=(2, 3), keepdims=True)
x_var = np.var(x, axis=(2, 3), keepdims=True0)
x_normalized = (x - x_mean) / np.sqrt(x_var + eps)
results = gamma * x_normalized + beta
return results
2.4 GroupNorm
torch.nn.GroupNorm(num_groups, num_channels, eps=1e-05, affine=True)
参数:
num_groups:需要划分为的groups num_features: 来自期望输入的特征数,该期望输入的大小为’batch_size
x num_features [x width]’ eps: 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。
momentum: 动态均值和动态方差所使用的动量。默认为0.1。 affine: 布尔值,当设为true,给该层添加可学习的仿射变换参数。
def GroupNorm(x, gamma, beta, G=16):
# x_shape:[B, C, H, W]
results = 0.
eps = 1e-5
x = np.reshape(x, (x.shape[0], G, x.shape[1]/16, x.shape[2], x.shape[3]))
x_mean = np.mean(x, axis=(2, 3, 4), keepdims=True)
x_var = np.var(x, axis=(2, 3, 4), keepdims=True0)
x_normalized = (x - x_mean) / np.sqrt(x_var + eps)
results = gamma * x_normalized + beta
return results
2.5 Switchable Normalization
def SwitchableNorm(x, gamma, beta, w_mean, w_var):
# x_shape:[B, C, H, W]
results = 0.
eps = 1e-5
mean_in = np.mean(x, axis=(2, 3), keepdims=True)
var_in = np.var(x, axis=(2, 3), keepdims=True)
mean_ln = np.mean(x, axis=(1, 2, 3), keepdims=True)
var_ln = np.var(x, axis=(1, 2, 3), keepdims=True)
mean_bn = np.mean(x, axis=(0, 2, 3), keepdims=True)
var_bn = np.var(x, axis=(0, 2, 3), keepdims=True)
mean = w_mean[0] * mean_in + w_mean[1] * mean_ln + w_mean[2] * mean_bn
var = w_var[0] * var_in + w_var[1] * var_ln + w_var[2] * var_bn
x_normalized = (x - mean) / np.sqrt(var + eps)
results = gamma * x_normalized + beta
return results
参考链接:
https://blog.csdn.net/liuxiao214/article/details/81037416
https://blog.csdn.net/shanglianlm/article/details/85075706















 805
805











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









