






 本文探讨了欧拉角在表示三维旋转时存在的自由度丢失问题,以及四元数如何通过旋转轴和旋转角度避免这一问题。四元数以其独特的数学结构确保了旋转表示的一致性和无歧义性,是现代三维图形学和航空航天计算中常用的方法。
本文探讨了欧拉角在表示三维旋转时存在的自由度丢失问题,以及四元数如何通过旋转轴和旋转角度避免这一问题。四元数以其独特的数学结构确保了旋转表示的一致性和无歧义性,是现代三维图形学和航空航天计算中常用的方法。
欧拉角用三组旋转角来确定旋转。由于对三个轴的旋转有先后顺序,而在一些情况下(第二个轴旋转),第三个轴的旋转本质上与第一个轴的旋转相等价,这时就造成了旋转上的“多对一”的映射,从而产生的缺失旋转自由度的问题。
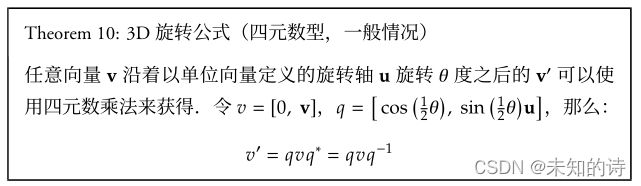
而四元数使用旋转轴与旋转角度表示三维旋转。【找到的三个自由度是:旋转轴与旋转角度。(三维上可以用两个自由度表示一个方向,通常是方向与坐标轴的夹角)】。从原理上讲,不存在类似于欧拉角的自由度丢失问题。
至于四元数如何使用旋转轴与旋转角度表示三维旋转,可以参考下图公式,推导过程就略了。
欧拉角用三组旋转角来确定旋转。由于对三个轴的旋转有先后顺序,而在一些情况下(第二个轴旋转),第三个轴的旋转本质上与第一个轴的旋转相等价,这时就造成了旋转上的“多对一”的映射,从而产生的缺失旋转自由度的问题。
而四元数使用旋转轴与旋转角度表示三维旋转。【找到的三个自由度是:旋转轴与旋转角度。(三维上可以用两个自由度表示一个方向,通常是方向与坐标轴的夹角)】。从原理上讲,不存在类似于欧拉角的自由度丢失问题。
至于四元数如何使用旋转轴与旋转角度表示三维旋转,可以参考下图公式,推导过程就略了。
 1243
1243

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























