






雷猴啊,我是无际。
作为一名单片机软件工程师,我对实时操作系统(RTOS)简直可以用“又爱又怕”来形容。
爱的是它那精准的实时性,能让项目功能的响应速度达到极致。
怕的是,如果没用好也会偶尔抽风,有时出现问题,不好定位,实时性也会受程序所影响。
所以,一般我做产品很少用RTOS,都是用自己写的架构比较多,缺点是项目大了,实时性不好把控。
想知道RTOS实时性是怎么实现的?遇到不稳定怎么办?别慌,这篇文章就是你的“技术锦囊”。
我会带你深入浅出地拆解RTOS的实时性秘密,告诉你它不稳定的原因,聊下从任务优先级到中断优化,再到真实案例直观演示。
废话不多说,咱们进入正题。
RTOS的实时性是嵌入式系统的命脉,尤其在工业控制、医疗设备、无人机这些时间敏感的场景里,它要是掉链子,后果不堪设想。
1.RTOS实时性是怎么实现的?
先说说RTOS的实时性是怎么来的,核心机制有以下几个: 1.1 任务调度 RTOS的核心就是任务调度器,它决定了哪个任务应该在CPU上运行。 为了保证实时性,RTOS通常采用基于优先级的调度算法。这意味着,每个任务都被赋予一个优先级,优先级高的任务有更多的机会和更高的权利抢占CPU资源。
举个例子,你在一家忙碌的餐厅当服务员,顾客点的菜就像RTOS里的任务。 有一桌VIP顾客点了份急单(高优先级任务),要求立刻上桌; 另一桌普通顾客点了份甜点(低优先级任务),不着急。 你作为服务员(RTOS调度系统),会先跑去厨房催促厨师赶紧做VIP的急单,确保它第一时间端上桌,而不会让甜点抢了先。 即使甜点已经开始准备,你也会让它等一等,直到急单完成。这样,餐厅的VIP顾客不会因为等待而生气,整体服务效率也得到了保证。
在这个比喻中: VIP顾客的急单代表高优先级任务,比如实时控制或紧急数据处理,必须马上完成。 普通顾客的甜点代表低优先级任务,比如日志记录或后台更新,可以稍后处理。 服务员就是RTOS的调度器,通过优先级管理,确保重要任务优先获得资源(厨师的时间和灶台)。
注意: 任务优先级的合理分配至关重要!如果优先级设置不当,可能会导致高优先级的任务“饿死”低优先级任务,或者出现优先级反转等问题,反而破坏了实时性。
1.2 中断管理 在嵌入式系统中,很多事件的发生是不可预测的,例如传感器数据到来、外部按键按下等等。这时,就需要中断机制来快速响应这些硬件事件。 关键点: ISR的执行时间必须尽可能短!长时间运行的ISR会阻塞其他中断的响应,严重影响系统的实时性。通常的做法是将ISR中耗时的操作放到任务中去处理。
1.3 任务间通信 在复杂的嵌入式系统中,通常会有多个任务协同工作。为了保证数据的一致性和任务执行的顺序,就需要有效的任务间通信与同步机制。
信号量: 用于任务间的同步和互斥访问共享资源。可以看作是一个计数器,任务可以通过P操作(减少计数器)来获取资源,通过V操作(增加计数器)来释放资源。
互斥锁(Mutex): 一种特殊的信号量,用于保护共享资源,防止多个任务同时访问导致数据 corruption。只有持有互斥锁的任务才能访问被保护的资源,访问完毕后需要释放锁。
消息队列: 允许任务之间传递数据。发送任务将消息放入队列,接收任务从队列中取出消息。
事件标志: 用于任务间的事件通知。一个任务可以等待一个或多个事件标志被设置后才继续执行。
重点: 不恰当的任务间同步机制可能会导致死锁或优先级反转等问题,这些都会严重破坏系统的实时性。
1.4 资源管理 在嵌入式系统中,CPU时间、内存、外设等都是有限的资源。
RTOS需要有效地管理这些资源,避免多个任务竞争同一资源导致系统效率低下甚至崩溃。
比如多个任务抢一个资源(比如串口),前面提到的互斥锁和信号量就是资源管理的重要手段。
1.5 时间管理 RTOS内置定时器,像个闹钟,确保任务准时起床干活。
听起来很完美对吧?但实际用起来,实时性不稳定就像程序员的脱发——防不胜防。那么,究竟是什么原因导致RTOS的实时性“抽风”呢?
2.实时性不稳定的“罪魁祸首”
RTOS实时性不稳定,原因五花八门,我总结了几个常见“嫌疑犯”: 2.1 任务优先级设置不当 高优先级任务跑太久,低优先级任务只能干瞪眼;或者优先级反转——低优先级任务占着茅坑不拉屎,高优先级任务只能憋着。
2.2 中断延迟 ISR写得像小说一样长,处理完一个中断其他都排队等死;或者中断嵌套太多,响应时间变得跟抽奖一样随机。
2.3 任务切换开销 任务切换要存上下文、换上下文,频繁切来切去就像跳广场舞,累得系统喘不过气。
2.4 资源竞争 多个任务抢资源,没管好就死锁,系统直接“罢工”。
2.5 系统负载过重 任务太多,或者某个任务执行时间长到离谱,RTOS忙不过来,只能“996”。
2.6 定时器精度不足 定时器像个不准的闹钟,任务起晚了,实时性自然崩。
3.如何解决实时性不稳定
面对实时性不稳定,咱们得对症下药。下面是几个实战过的解决方案。
3.1 精细化管理任务优先级
-
优先级分配原则
关键的、对时间要求最严格的任务,分配最高的优先级。 例如,电机控制、传感器数据采集等。
响应外部事件的任务,分配较高的优先级。 例如,按键扫描、通信接收等。
后台处理、不那么紧急的任务,分配较低的优先级。 例如,数据存储、状态显示等。
空闲任务分配最低的优先级。
-
使用优先级继承协议
当一个高优先级任务被一个持有它所需资源的低优先级任务阻塞时,临时提升低优先级任务的优先级,使其能够尽快执行完毕并释放资源,从而避免优先级反转。
-
任务分解
将长时间运行的任务分解成多个短小的任务,或者利用状态机等机制,避免单个任务长时间占用CPU。
3.2 优化你的中断服务例程(ISR)
保持ISR的简洁高效: ISR中只做最紧急、最必要的操作,例如读取状态寄存器、清除中断标志等。
将耗时的操作放到任务中处理: 在ISR中发送一个信号量或者设置一个事件标志,通知相应的任务去执行后续的处理工作。
谨慎使用中断嵌套: 如果必须使用中断嵌套,要仔细评估每个中断的优先级和执行时间,避免嵌套过深。
禁止在ISR中进行阻塞操作: ISR应该快速执行完毕,不能进行任何可能导致阻塞的操作,例如等待信号量、发送/接收消息队列等。
3.3 合理设计任务切换策略
-
调整时间片大小
如果使用时间片轮转调度,需要根据任务的特性和系统需求,合理调整每个任务的时间片大小。
-
减少不必要的任务同步
仔细评估任务间的通信和同步需求,避免过于频繁的同步操作。
-
使用非阻塞的同步机制
尽量使用非阻塞的同步机制,例如非阻塞的发送/接收消息队列、查询状态等。
4. 资源管理:别让任务打群架
-
互斥锁:共享资源加把锁,谁用谁拿钥匙,用完还。
-
信号量:控制访问顺序,比如串口只能一个任务用,信号量就是“排队号”。
-
防死锁:别让任务互相等对方放手,比如A等B,B等A,那就完蛋。定个资源访问顺序,死锁自然跑路。
比如两个任务抢串口,死锁了半天。加了个互斥锁,规定先到先得,问题秒解,串口再也不会“罢工”。
5. 系统负载:别把RTOS累垮
-
控制任务数:任务不是越多越好,根据系统的实际需求,创建必要的任务即可,避免创建过多的冗余任务。
-
优化代码:任务执行时间能短则短,编写高效的代码,减少任务的执行时间,降低CPU的负载。
-
考虑使用更强大的硬件:如果系统负载过重,并且代码优化空间有限,可以考虑使用性能更强的CPU或者增加CPU核心。
6. 定时器精度
-
选择高精度的硬件定时器: 选用具有更高分辨率和更稳定时钟源的硬件定时器。
-
配置合适的定时器参数: 根据任务的实时性要求,配置合适的定时器预分频值和计数周期。
-
使用RTOS提供的精准定时器服务: 充分利用RTOS提供的软件定时器和周期性任务机制。
7. 从翻车到翻盘案例
为了让你更好地以上方法,我们来分析一个常见的实时性问题:
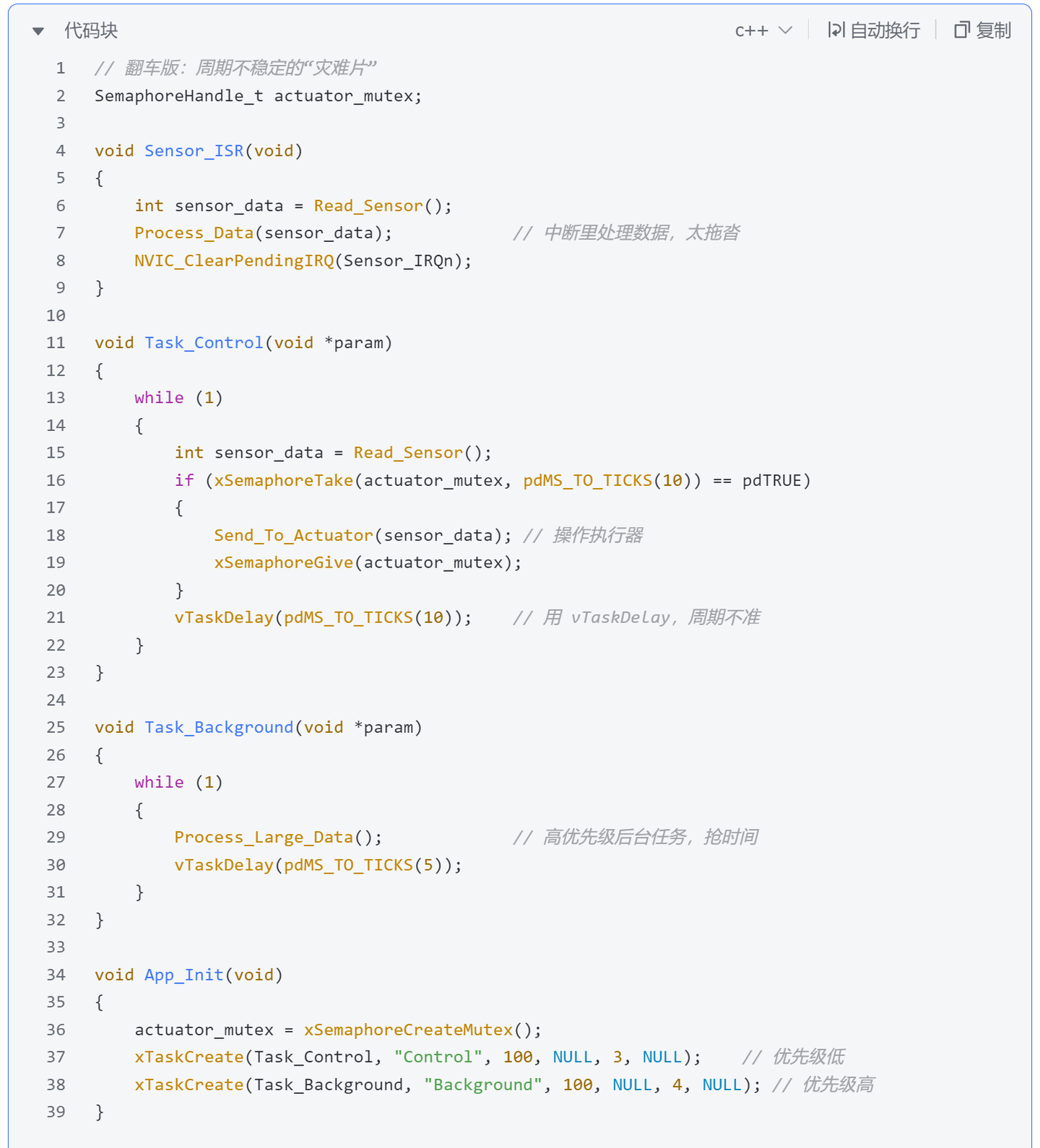
在一个工业控制系统中,高优先级的控制任务需要以固定的周期(例如10ms)读取传感器数据并控制执行器。但是,偶尔会出现控制周期不稳定的情况。
为了让你更直观地感受这个“翻盘”过程,我用 FreeRTOS 写一段代码对比。先看看翻车的版本:
添加图片注释,不超过 140 字(可选)
翻车原因:
-
优先级混乱:控制任务优先级(3)比后台任务(4)低,被小弟抢占。
-
中断拖沓:Sensor_ISR 里塞了数据处理,耗时长,别的中断只能排队。
-
延迟随意:vTaskDelay 只保证延时至少 10ms,但实际周期受调度影响,可能是 12ms、15ms。
-
资源竞争:虽然加了锁,但后台任务跑得快,偶尔也会抢执行器。
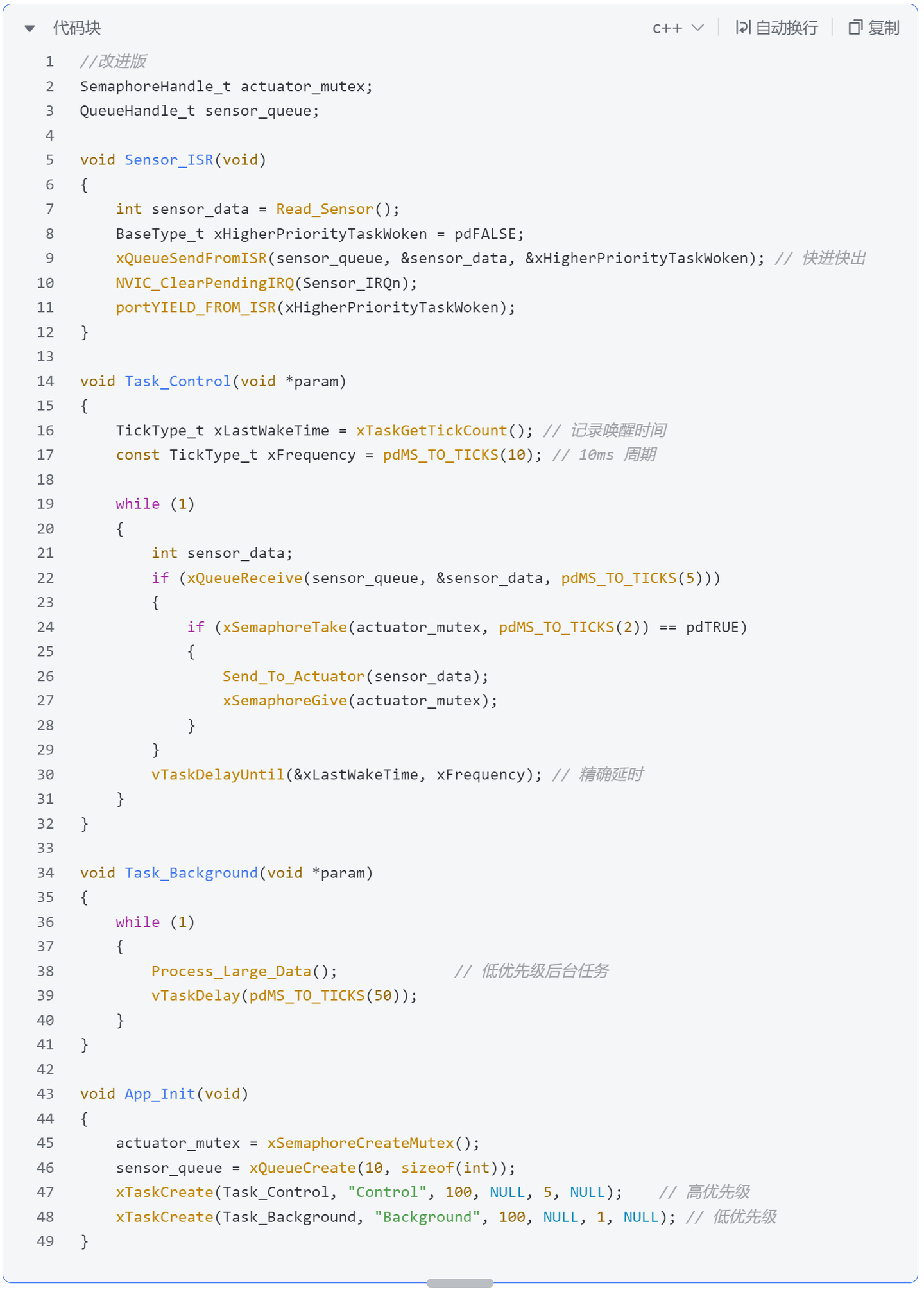
再看看翻盘后的改进版,重拳出击:
添加图片注释,不超过 140 字(可选)
优化细节:
优先级优化:控制任务优先级(5)最高,后台任务(1)靠边站,没人敢抢。
中断精简:Sensor_ISR 只扔数据进队列,快得像闪电,绝不拖后腿。
精确周期:vTaskDelayUntil 根据上次唤醒时间精确控制下次运行,10ms 稳得一批。
资源隔离:队列传数据,互斥锁管执行器,任务间配合得像老夫老妻。
到这,你应该对RTOS实时性的实现和不稳定的解决办法有了谱。说白了,关键在于理解它的机制,抓住问题的根,再用对方法收拾它。
最近很多粉丝问我单片机怎么学,我根据自己从业十年经验,累积耗时一个月,精心整理一份「单
片机最佳学习路径+单片机入门到高级教程+工具包」,全部无偿分享给铁粉!!!
除此以外,再含泪分享我压箱底的22个热门开源项目,包含源码+原理图+PCB+说明文档,让你迅速进阶成高手!

教程资料包和详细的学习路径可以看我下面这篇文章的开头。


















 1025
1025

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









