






6.1 AEB控制总体设计
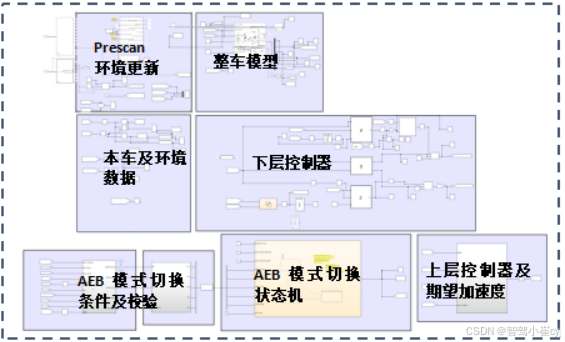
图6.1
为搭建的Matlab/Simulink与PreScan联合仿真测试联合仿真平台,主要有环境数据更新模块、车辆模型、雷达数据和跟车模型的上层控制器和下层控制器四个模块。其中前车采用 Perscan提供的简易车辆模型,主车采用高精度车辆动力学模型,并搭载雷达模型,可实现前方车辆数据的采集,自动启动控制模式,实现自动紧急预警及制动控制策略。仿真平台主要用于AEB系统的模型测试和验证。
MATLAB/ Simulink与PreScan联合仿真测试
本论文设计的AEB系统控制模型基于Matlab/Simulink软件搭建,以此方式验证AEB系统的控制效果,本节采用AEB典型交通场景作为试验工况:CCRS工况、CCRB工况、CCRM工况。
自适应巡航系统的控制方式分为统一控制和分层控制[68]。统一控制受模型适配影响较大,鲁棒性较差。当前采用较多的是分层控制,包括决策层和控制层,决策层根据采集到的车间距和相对速度等信息,计算期望加速度,控制层产生期望油门或刹车命令来跟踪决策层计算的期望加速度。本章完成的AEB上层控制策略,并输出给下层控制器,结合主车车况信息,以车辆驱动行驶方程得的方式输出需求的报警信号或节气门开度和制动压力,再将决策信号输给车辆模型,完成对车辆的纵向控制。整体的系统框架如图5.1所示。
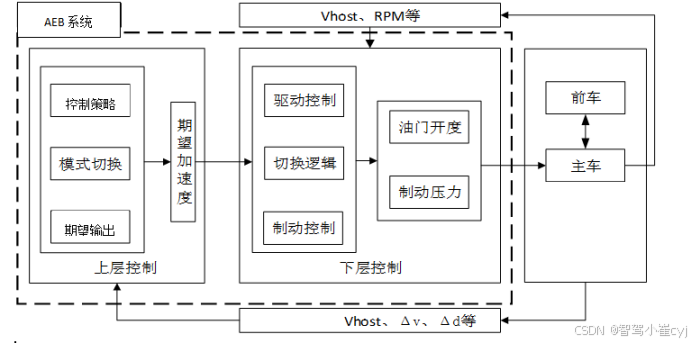
图5.1
在这里插入代码片
AEB控制系统的整体方案
5.1 AEB系统控制需求分析
所以本文在设计在AEB系统分层控制是目前AEB系统效果较好的方式。
下层对加速度的控制,传统方法有传统PID控制、模糊PID控制等,但这些方法中的参数调整对设计人员的经验要求较高。而基于动力学模型的逆模型控制方法响应快,控制相对精确且稳定性高。因此本文将采取基于动力学模型的逆模型控制方法来实现对上层输出的期望加速度的控制。
5.2 AEB上层控制器建模
5.2.1 AEB模式划分
1.AEB_FCW报警功能
2、AEB_part部分制动功能
3、AEB_FULL全部制动功能
5.2.2 AEB模式划分系统防撞预警控制策略流程图 如下
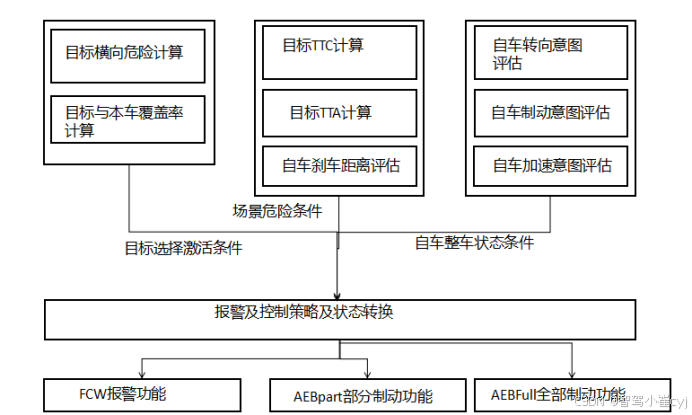
AEB 系统防撞预警控制策略流程图
5.2.2 目标横向危险计算
5.2.3 目标与本车覆盖率
5.2.4 TTC计算
5.2.4 TTA计算
5.2.4 自车刹车距离评估
上边是全力制动刹车距离估计,下边是部分制动刹车距离估计,
5.2.4 驾驶意图评估
1、自车不是倒车档位
2、驾驶员油门开度小于80%
3、方向盘转角小于50度
4、自车横向加速度小于0.5
满足上述证明驾驶员为未时发现目标,未采取避撞措施
5.2.5 状态机切换
最终在Matlab/Simulink中的完成对考虑情绪状态的AEB上层模式建模。如图5.4所示,在Matlab/Simulink对AEB上层控制模型的5个工作模式的切换条件计算模块建模,如图5.5为针对被控车辆AEB系统工作模式条件判断模块。
图5.4 切换条件计算模块 图5.5 被控车辆切换条件判断模块
传感器模块获取到与前车运动状态信息以及主车速信息后,输入到如图5.4所示的切换条件计算模块,根据传感器获取的本车车速、相对距离、相对车速、计算得出前车速度、目标危险状态、当前TTC及TTA、自车制动评估、自车驾驶意图等数据。如图5.5为切换条件判断模块,用于对计算结果进行判断,判断出当前主车应该切换为哪种模式,并用标签表示。本模型一共建立了5个条件标签模型,条件标签的输出结果为“与或非”门限值变量,因此在模式切换时只需将各模式的标签为1时作为真值,将所有标签按照状态优先级组合,作为模式开启或者关闭的条件。
为防止条件突变,验证条件有效性,增加连续三帧校验模块。

















 5464
5464

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









