






 本文探讨了在汽车ACC系统中,如何通过考虑实际驾驶限制、速度变化和路面条件,采用插值技术调整加速度,以实现更平顺的定速和跟车巡航。MATLAB仿真被用于参数调优,以优化不同速度区间内的驾驶体验。
本文探讨了在汽车ACC系统中,如何通过考虑实际驾驶限制、速度变化和路面条件,采用插值技术调整加速度,以实现更平顺的定速和跟车巡航。MATLAB仿真被用于参数调优,以优化不同速度区间内的驾驶体验。
关于acc控制,一般有两个模式,定速巡航和跟车巡航。
定速巡航指的是在没有目标车的情况下,自车按照设定的速度行驶,而跟车模式下,自车和目标车在行驶的时候保持一定的距离。
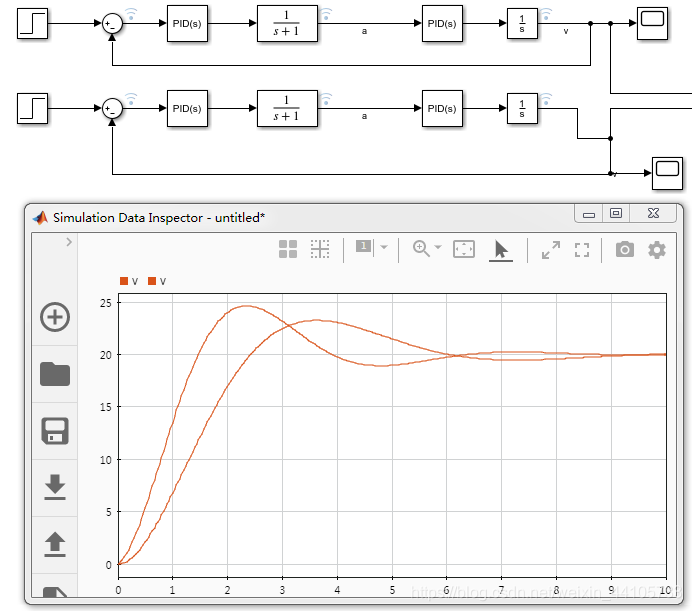
假设数据传递足够准确,并且横向控制和路面情况都不考虑,至少我们可以拿到一组包含,自车和前车的速度,自车和前车距离的数据。在定速模式下,自车的速度误差可以构成闭环控制,在matlab进行简单的仿真,可以根据自己的需求去调节参数,得到对应的曲线。
问题点总结:1,实车需要考虑机构的因素,加速度和加加速度都是有限制的。
2,巡航速度是可调整的,但是整定后的Pid参数不一定在各个速度区间有良好的行驶体验。
3. 路面不平造成的速度波动,使得车辆本身受到控制,从而在不断的震动。
解决思路:利用插值,根据不同的巡航设定速度,以及速度误差,选取不同的加速度输出到执行器。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









