







今天在打AES的代码,打到列混合变换的时候对有限域的乘法不是很熟悉,但是查了很多资料结合书本最后算是弄会了,分享一下自己的心得
这里是引用在密码学中经常用到有限域的乘法,一般在AES中用到的是GF(2 ^ 8)有限域内乘法。什么是有限域呢?有限域通俗的讲就是函数的运算结果全都包含在一个域中,不同于实数域,有限域有一个最大值,所有超过这个最大值的数都会经过一定的方法使他回到这个域中,在密码学中应用很广泛,2^8意味着这个域的最大值是256。
下面讲一下乘法的原理(数学原理):
在二进制乘法中,所有的数都能够通过0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80异或得到,二进制表示如下:
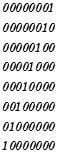
所以任意的一个二进制数,都能由这八个二进制数表示得到!
例如73(01110011)可以有以下组合而成:
73(01110011)=(00000001)⊕(00000010)⊕(00010000)⊕(00100000)⊕(01000000)
如果想计算有限域的乘法例如7395的话,即(01110011)(10010101)。刚才我们说了任意的一个二进制数,都能由这八个二进制数表示得到,因此根据乘法的结合律我们可以这样子来算:
73×95=[(00000001)⊕(00000010)⊕(00010000)⊕(00100000)⊕(01000000)]*(10010101)
为什么这样子来算呢?因为仔细观察73的二进制分解,我们可以发现73分解之后每一个元素都是2的倍数。而2的倍数乘以一个2进制数可以直接左移,这样子是不是计算乘法就方便了许多。然后再把总结果异或就可以到到乘法的结果。
为了方便计算,我们定义了一个模型及XTime,及x乘以一个二进制数,这个二进制数用多项式来表示,即:x*a(x)
那么问题又来了,有限域最多为a7x^7,万一最高位为1再去乘就会溢出,所以我们要分别讨论
①当a7的系数为0,即最高位为0的时候,例如01100011,最高位为0,乘以x不会溢出,正常计算,左移就行
②当a7的系数为1,即最高位为1的时候,例如10010101,最高位为1,乘以x会溢出,在计算机中我们应该这样处理这种溢出的情况:把10010101左移一位,右边补0,再与(00011011)异或。对于x²相当于循环运算,乘以x的基础上再乘以x
数学上计算就没有计算机那么麻烦,贴张图:
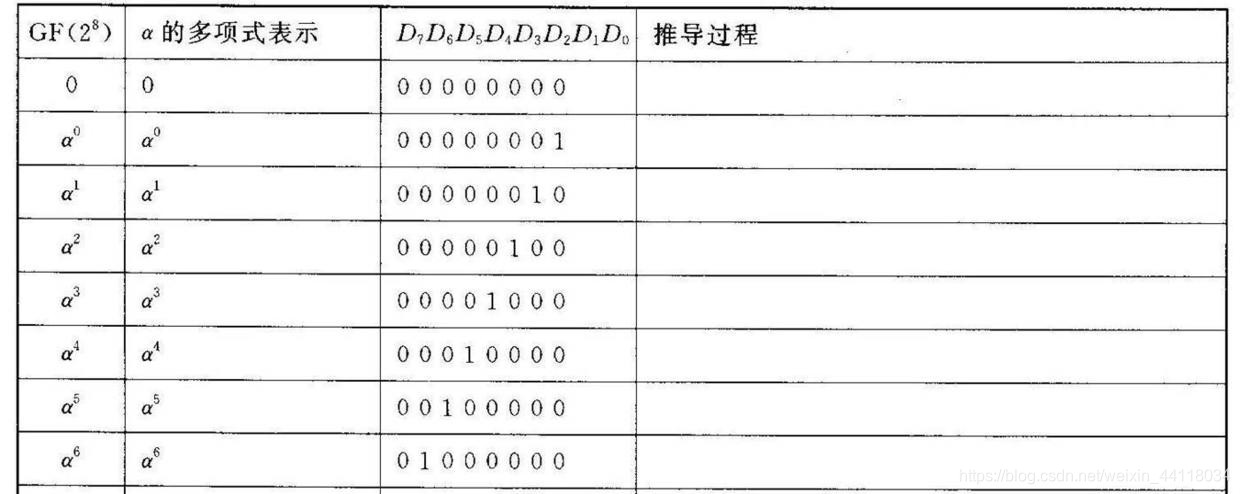
GF(2m)域
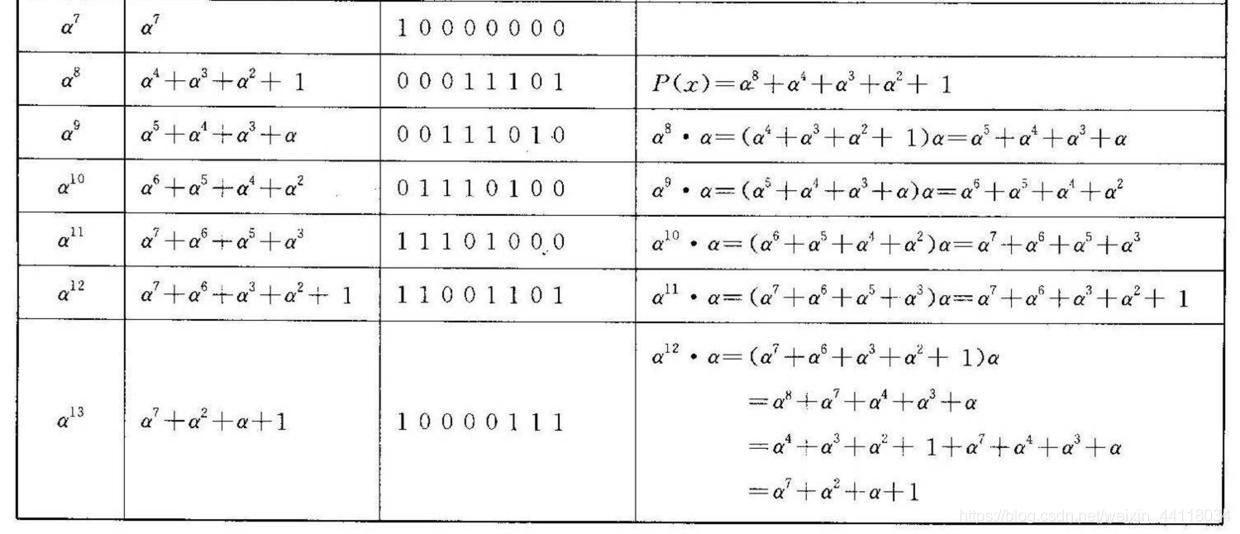
当m=8时,本原多项式为P(x) = x8 + x4 +x3 + x2 + 1 .
这个很重要,因为一切化解都来源与此式。
在伽罗华域中,加法等同于对应位异或,所以
现在把α定义为P(x) = 0的根,即:
α8+α4+α3+α2+1 = 0
α8=α4+α3+α2+1
在乘积得出来的多项式次数大于7时,我们需要对多项式在GF(2)上关于h(x)求余数,也就是
129×5=(x ^ 7+1)*(x ^ 2+1)=x ^ 9+x ^ 7+x ^ 2+1
将上面的函数加上x*h(x)可以消去x^9,(其实就是手工除法过程,只是现在每一次商总是0或1),所以
129×5=x^ 9+x^ 7+x^ 2+1+x^ 9+x^ 5+x^ 4+x^ 3+x=x^ 7+x^ 5+x^ 4+x^ 3+x^2+x+1
=0010111111=191

















 824
824

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









