






文章目录
week35 SE-LSTM
摘要
本周阅读了题为Large-scale water quality prediction with integrated deep neural network的论文。这项工作提出了一种基于长期短期记忆的编码器-解码器神经网络和 Savitzky-Golay 滤波器的混合模型。其中,Savitzky-Golay滤波器可以消除水质时间序列中的潜在噪声,长短期记忆可以研究复杂水环境中的非线性特性。这样就提出了一个集成模型并有效地获得了统计特征。基于真实数据的实验证明,其预测性能优于几个最先进的同行。
Abstract
This week read the paper entitled Large-scale water quality prediction with integrated deep neural network. This work proposes a hybrid model based on a long short-term memory-based encoder-decoder neural network and a Savitzky-Golay filter. Among them, the filter of Savitzky-Golay can eliminate the potential noise in the time series of water quality, and the long short-term memory can investigate nonlinear characteristics in a complicated water environment. In this way, an integrated model is proposed and effectively obtains statistical characteristics. Realistic data-based experiments prove that its prediction performance is better than its several state-of-the-art peers.
一、文献阅读
1. 题目
标题:Large-scale water quality prediction with integrated deep neural network
作者:Jing Bi, Yongze Lin, Quanxi Dong, Haitao Yuan, MengChu Zhou
期刊名:Information Science
链接:https://doi.org/10.1016/j.ins.2021.04.057
2. abstract
这项工作提出了一种基于长期短期记忆的编码器-解码器神经网络和 Savitzky-Golay 滤波器的混合模型。其中,Savitzky-Golay滤波器可以消除水质时间序列中的潜在噪声,长短期记忆可以研究复杂水环境中的非线性特性。这样就提出了一个集成模型并有效地获得了统计特征。基于真实数据的实验证明,其预测性能优于几个最先进的同行。
This work proposes a hybrid model based on a long short-term memory-based encoder-decoder neural network and a Savitzky-Golay filter. Among them, the filter of Savitzky-Golay can eliminate the potential noise in the time series of water quality, and the long short-term memory can investigate nonlinear characteristics in a complicated water environment. In this way, an integrated model is proposed and effectively obtains statistical characteristics. Realistic data-based experiments prove that its prediction performance is better than its several state-of-the-art peers.
3. 网络架构
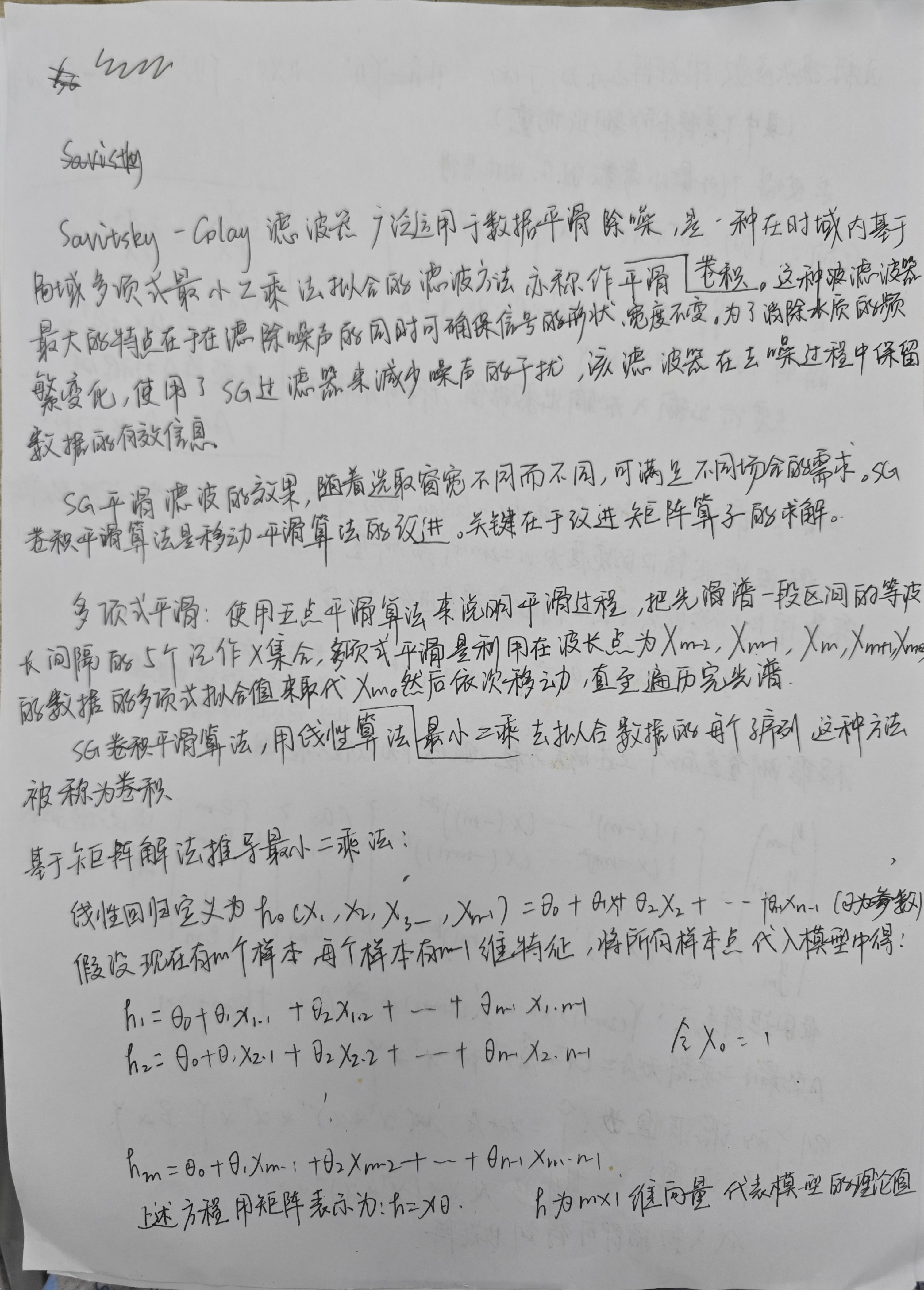
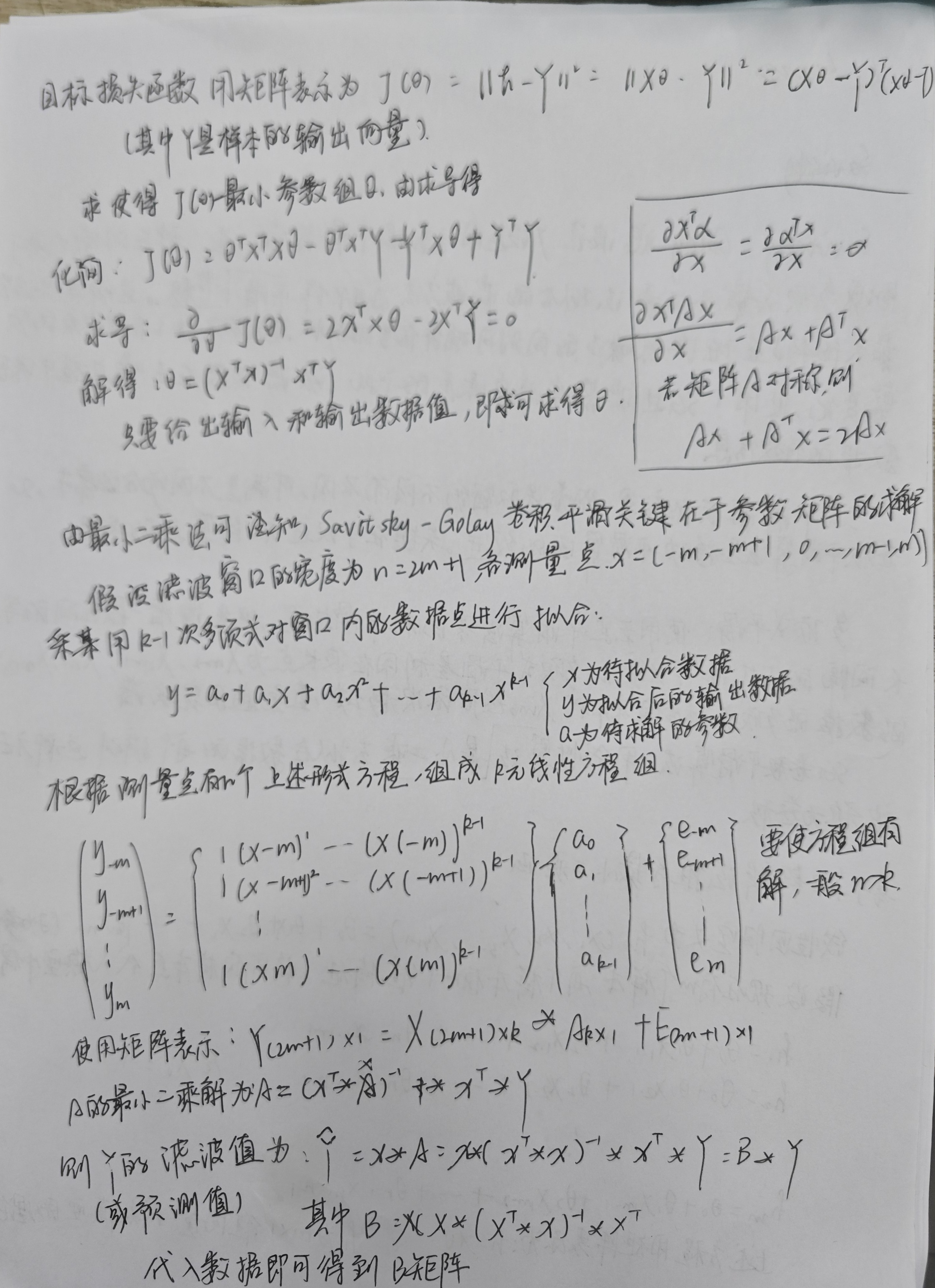
该文提出的模型改进了编码器-解码器网络结构,使其能够更好地适应多步时间序列预测。同时,为了解决时间序列数据的降噪问题,该工作采用SG滤波器对原始数据进行去噪。G 滤波器可以有效保留时间序列的特征,并去除其噪声。同时,结合基于LSTM的编码器-解码器模型,模型显着提高了多步预测的准确性。
3.1 Savitsky-Golay 滤波器
·
3.2 模型结构——SE-LSTM
该模型提出了混合框架,该框架通过结合SG滤波器和基于LSTM的编码器-解码器网络来实现对未来水质的预测
问题表述: X = { x 1 , . . . , x t , . . . , x T } X=\{x_1,...,x_t,...,x_T\} X={x1,...,xt,...,xT}表示水质的时间序列,T表示之前的T个时间步长。 x ‾ \overline x x表示SG过滤器处理后的水质值。 y ^ \hat y y^表示水质值的预测序列。 Y ^ = { y ^ 1 , . . . , y ^ t ′ , . . . , y ^ τ } \hat Y=\{\hat y_1,...,\hat y_{t'},...,\hat y_\tau\} Y^={y^1,...,y^t′,...,y^τ} 代表接下来s个时间步的预测值。
降噪后,本工作采用LSTM模型来预测水质。 LSTM 可以从重要的经验中学习,这些经验具有长期的依赖关系。 LSTM的存储单元如下图所示。
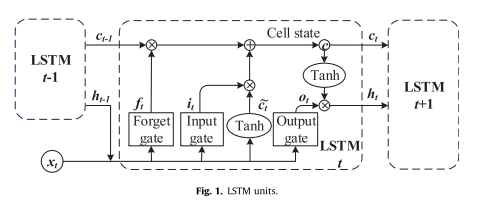
LSTM的反向传播(BP)算法与RNN的算法一致。
为了获得更好的预测精度,这项工作提出了一种新颖的编码器-解码器神经网络,如下图所示。
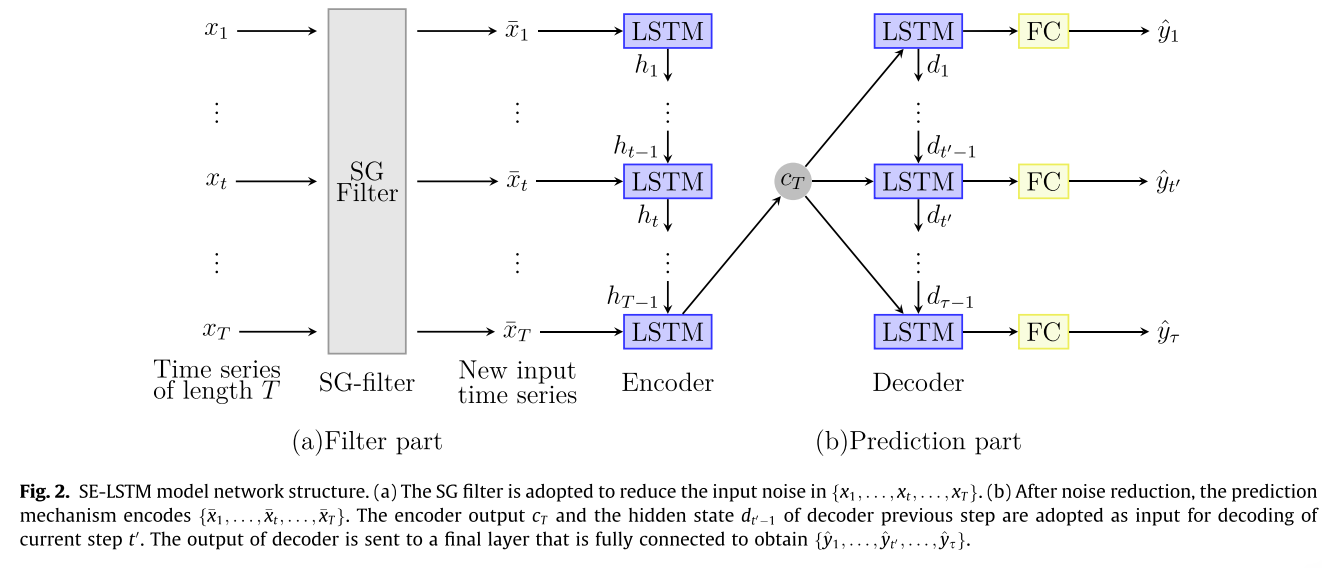
上图中的编码器网络是一个LSTM,它对输入
{
x
1
,
.
.
.
,
x
t
,
.
.
.
,
x
T
}
\{x_1,...,x_t,...,x_T\}
{x1,...,xt,...,xT}进行顺序变换;。然后,获得 t 处从
x
t
x_t
xt 到
h
t
h_t
ht 的映射:
h
t
=
f
1
(
h
t
−
1
,
x
t
)
(12)
h_t=f_1(h_{t-1,x_t}) \tag{12}
ht=f1(ht−1,xt)(12)
其中
h
t
h_t
ht 是编码器在 t 时的隐藏状态,
f
1
f_1
f1 是 LSTM 的一个单元。
c
T
c_T
cT是基于LSTM的编码器获得的隐藏状态信息。解码器也是一个LSTM,通过获取
{
y
^
t
,
.
.
.
,
y
^
t
′
,
.
.
.
,
y
^
τ
}
\{\hat y_t,...,\hat y_{t'},...,\hat y_{\tau}\}
{y^t,...,y^t′,...,y^τ}来产生输出给定隐藏状态
d
t
′
d_{t'}
dt′,而
d
t
′
d_{t'}
dt′以
c
T
c_T
cT 为条件。令
d
t
′
d_{t'}
dt′ 表示解码器在
t
′
t'
t′ 时的隐藏状态信息。因此,
d
t
′
d_{t'}
dt′ 可得为:
d
t
′
=
f
2
(
d
t
′
−
1
,
c
T
)
(13)
d_{t'}=f_2(d_{t'-1},c_T) \tag{13}
dt′=f2(dt′−1,cT)(13)
f
2
f_2
f2 是另一个 LSTM 单元。 LSTM 提取时间序列的复杂特征。在多步预测中,编码器的输出
c
T
c_T
cT和来自解码器的隐藏状态
d
t
′
−
1
d_{t'-1}
dt′−1的最后一步可以提高多步预测的性能。全连接层可以将它们输出为预测值,如下所示。
y
^
t
′
=
w
k
T
⋅
d
t
′
(14)
\hat y_{t'}=w^T_k\cdot d_{t'} \tag{14}
y^t′=wkT⋅dt′(14)
模型步骤
- SG滤波器
- 将原始序列 { x 1 , . . . , x t , . . . , x t } → { x ‾ 1 , . . . , x ‾ t , . . . , x ‾ T } \{x_1,...,x_t,...,x_t\}\rightarrow \{\overline x_1,...,\overline x_t,..., \overline x_T\} {x1,...,xt,...,xt}→{x1,...,xt,...,xT}
- 基于LSTM的编码器层
- h t = f 1 ( h t − 1 , x t ) h_t=f_1(h_{t-1},x_t) ht=f1(ht−1,xt), h t h_t ht是t时刻编码层的隐藏状态, f 1 f_1 f1是一个LSTM单元<得到从 x t x_t xt到 h t h_t ht的映射>
- 基于LSTM的解码曾
- d t ′ = f 2 ( d t ′ − 1 , c T ) d_{t'}=f_2(d_{t'-1},c_T) dt′=f2(dt′−1,cT), c T c_T cT是由编码器得到的隐藏状态信息, f 2 f_2 f2是一个LSTM单元, d t ′ d_{t'} dt′是解码在t’时刻的隐藏状态信息
- 全连接层
- y ^ t ′ = W k T ⋅ d t ′ \hat y_{t'}=W^T_k\cdot d_{t'} y^t′=WkT⋅dt′,W为权重,k为层数, y ^ t ′ \hat y_{t'} y^t′为t’处的预测值
4. 文献解读
4.1 Introduction
水质的精确预测有助于水环境的管理。传统的神经网络无法捕获长期依赖性。长期依赖性意味着期望的输出取决于很久以前出现的输入。为了解决这一挑战,研究人员提出了一种长短期记忆(LSTM)模型,该模型采用记忆机制来捕获长期依赖性,并普遍应用于不同类型的现实生活领域。然而,由于数据中的噪声,这些预测模型经常遇到过度拟合的问题。 Savitzky-Golay(SG)滤波器可以减少时间序列的噪声干扰,提高上述模型的预测精度。
4.2 创新点
这项工作设计了一种混合模型,使用基于 LSTM 和 SG 滤波器的编码器-解码器神经网络(称为 SELSTM)来预测未来的水质。主要贡献总结如下:
- 提出了一种改进的编码器-解码器网络结构,可以更好地预测多步水质时间序列数据。因此,所提出的SE-LSTM可以更好地处理时间序列数据中的长序列。
- 创新性地将SG滤波器的降噪能力和LSTM的特征提取能力结合和集成,显着提高了多步预测精度。
4.3 实验过程
4.3.1 训练参数
采用MAE作为SE-LSTM的损失函数,SE-LSTM采用Adam优化器[28]中的梯度下降算法。这里,为了有效地训练模型,初始学习率设置为0.01,使用 1 × 1 0 − 6 1\times 10^{-6} 1×10−6作为训练损失衰减
4.3.2 数据集
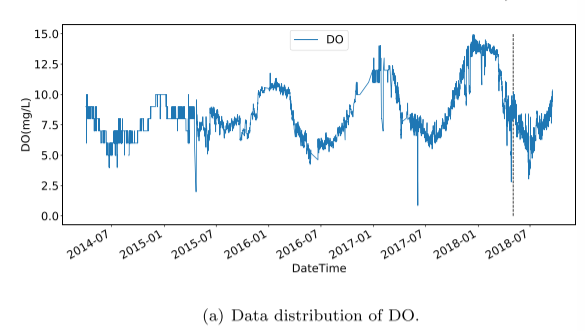
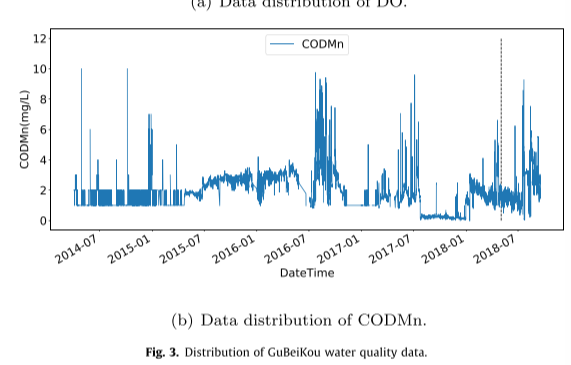
实验数据集采集自北京古北口,该数据每4小时收集一次,从2014年4月到2018年10月共收集了1万多条数据。然后将数据集分成两部分,包括训练集和测试集,比例为9:1。所有预测模型均采用溶解氧(DO)和化学需氧量(CODMn)作为实验数据。DO和CODMn的分布如图所示:
4.3.3 实验设置
在数据预处理中,本工作采用平滑操作来消除不稳定因素,但同时也去除了原始时间序列中的一些有效信息。首先在对比实验中通过不同的窗口尺寸选择出最佳的过滤器,在原始时间序列的移动中值(MM)、SG和MA滤波器中,当窗口大小为5时三个过滤器获得最小的MSE值,并且SG滤波器的MSE值最小。
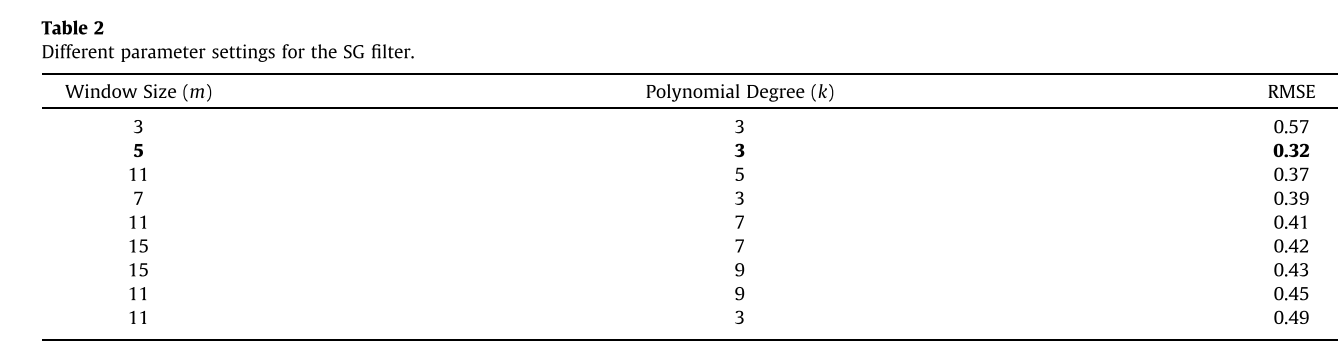
在设置SG滤波器参数中,我们给出了不同的参数设置,当窗口大小为5,即m¼5,并且k度的多项式设置为3时,获得的均方根误差(RMSE)较小。过大的窗口尺寸会去除时间特征,而过小的窗口尺寸则不能用于降噪。同样,k太大会导致最小二乘过拟合,k太小会导致欠拟合。
评估指标:为了证明SE-LSTM的预测性能,采用MAE、MAPE和RMSE三个指标来评价其预测精度。
基准模型:
为了从不同方面比较所提出的方法,我们选择了几个基准模型进行比较。
ARIMA。将过去值和随机噪声通过线性函数拟合到预测值中。
ANN。人工神经网络能很好地处理非线性特征,并具有良好的预测能力。
极端梯度增强(XGBoost)。是一种通用的Tree Boosting算法,它被广泛应用于机器学习领域。首先利用树集成技术构建回归树,并将所有回归树的总得分作为最终预测值。
SVR。SVR可以通过获得最小的结构风险来提高泛化能力,在统计样本较少的情况下,也能得到较好的统计规律。
LSTM。LSTM是一种常用的序列预测模型,特别是LSTM在产生时间序列的长期依赖关系方面表现优异。为了比较LSTM和SE-LSTM的性能,实验中它们的超参数设置相同。
4.3.4 实验结果
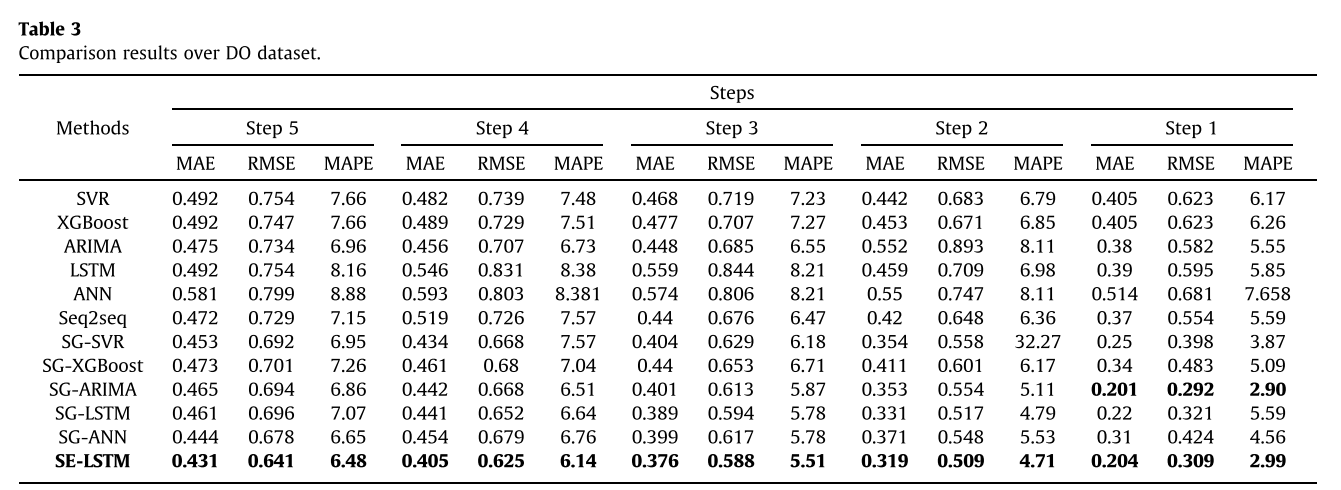
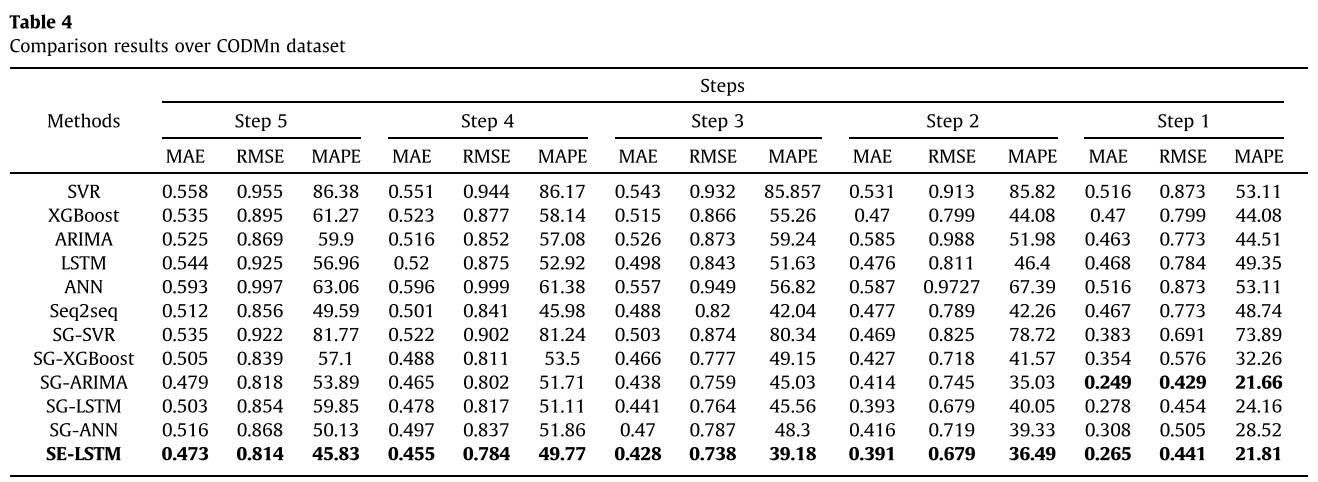
将SE-LSTM与其典型的基准测试方法进行比较,实验结果表明,传统的非线性模型与线性模型相比并没有太大的优势。这是因为水质时间序列具有较强的线性特征,线性模型具有一定的优势。此外,深度学习的预测精度优于传统模型,并且由于网络结构的变化,SE-LSTM在多步预测精度上优于SG-LSTM。此外,在加入SG滤波器后,所有模型的预测精度都得到了显著提高,验证了SG滤波器能更好地保留时间序列特征并有效去除噪声。虽然ARIMA模型在单步预测上略优于SE-LSTM模型,但SE-LSTM在多步预测上优于ARIMA模型。观察到SE-LSTM在三个指标方面优于其同行。
DO数据集的比较结果:
在CODMn数据集上的比较结果:
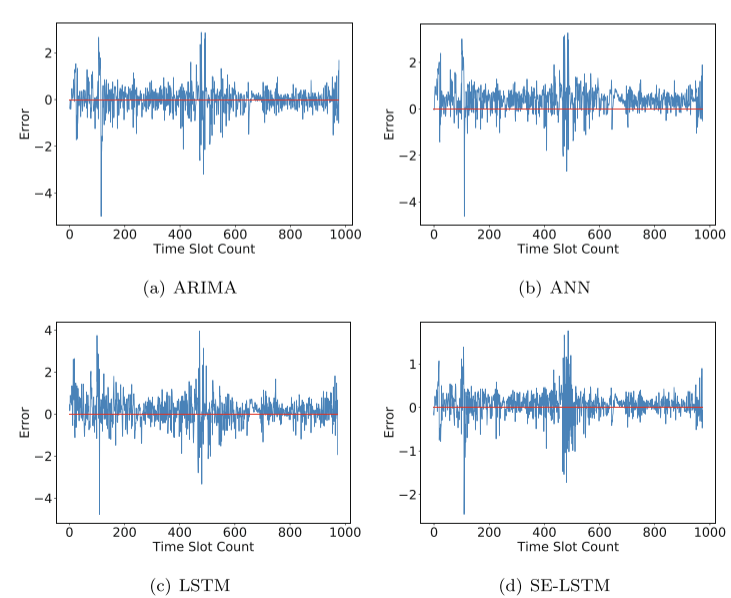
DO数据集上对比试验的图像:
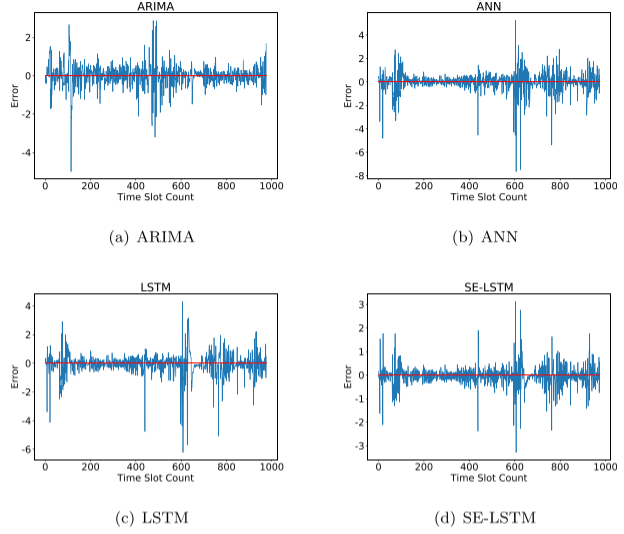
CODMn数据集上对比实验的图像
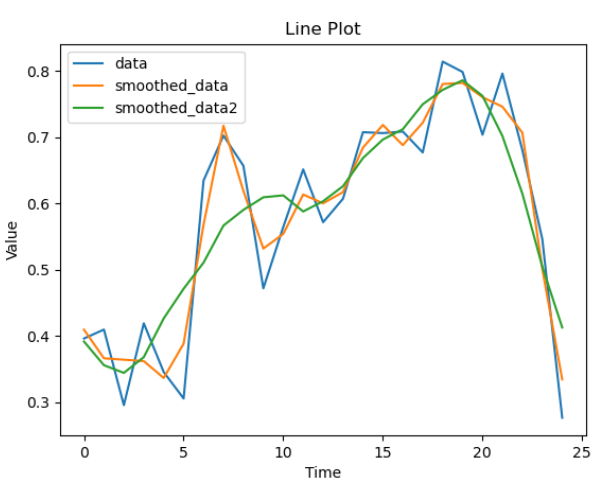
5. python环境下基于scipy实现SG滤波平滑
import matplotlib.pyplot as plt
import numpy as np
def SG01(data,window_size):
# 前后各m个数据,共2m+1个数据,作为滑动窗口内滤波的值
m = int((window_size - 1) / 2) # (59-1) /2 = 29
# 计算 矩阵X 的值 ,就是将自变量x带进去的值算 0次方,1次方,2次方.....k-1次方,一共window_size行,k列
# 大小为(2m+1,k)
X_array = []
for i in range(window_size): #
arr = []
for j in range(3):
X0 = np.power(-m + i, j)
arr.append(X0)
X_array.append(arr)
X_array = np.mat(X_array)
# B = X*(X.T*X)^-1*X.T
B = X_array * (X_array.T * X_array).I * X_array.T
data = np.insert(data, 0, [data[0] for i in range(m)]) # 首位插入m-1个data[0]
data = np.append(data, [data[-1] for i in range(m)]) # 末尾插入m-1个data[-1]
# 取B中的第m行 进行拟合 因为是对滑动窗口中的最中间那个值进行滤波,所以只要获取那个值对应的参数就行, 固定不变
B_m = B[m]
# 存储滤波值
y_array = []
# 对扩充的data 从第m个数据开始遍历一直到(data.shape[0] - m) :(第m个数据就是原始data的第1个,(data.shape[0] - m)为原始数据的最后一个
for n in range(m, data.shape[0] - m):
y_true = data[n - m: n + m + 1] # 取出真实y值的前后各m个,一共2m+1个就是滑动窗口的大小
y_filter = np.dot(B_m, y_true) # 根据公式 y_filter = B * X 算的 X就是y_true
y_array.append(float(y_filter)) # float(y_filter) 从矩阵转为数值型
return y_array
if __name__ == '__main__':
data = [0.3962, 0.4097, 0.2956, 0.4191, 0.3456, 0.3056, 0.6346, 0.7025, 0.6568, 0.4719, 0.5645, 0.6514, 0.5717,
0.6072, 0.7076, 0.7062, 0.7086, 0.677, 0.8141, 0.7985, 0.7037, 0.7961, 0.6805, 0.5463, 0.2766]
smoothed_data = SG01(data,5)
smoothed_data = [round(i, 4) for i in smoothed_data]
smoothed_data2 = SG01(data,11)
smoothed_data2 = [round(i, 4) for i in smoothed_data2]
print("data:", data)
print("smoothed_data:", smoothed_data)
print("smoothed_data2:", smoothed_data2)
plt.plot(data, label='data')
plt.plot(smoothed_data, label='smoothed_data')
plt.plot(smoothed_data2, label='smoothed_data2')
plt.xlabel('Time')
plt.ylabel('Value')
plt.title('Line Plot')
plt.legend()
plt.show()
结论
该模型研究具有长短期记忆和 Savitzky-Golay 滤波器的编码器-解码器神经网络。由此产生的预测模型可以预测未来水质的时间序列。应用 Savitzky-Golay 滤波器来消除时间序列数据中的噪声。这项工作采用基于 LSTM 的编码器-解码器模型来捕获特征。最后,真实数据的实验结果证明,所提出的模型比几个基准模型提供了更准确的预测。
参考文献
[1] Jing Bi, Yongze Lin, Quanxi Dong, Haitao Yuan, MengChu Zhou “Large-scale water quality prediction with integrated deep neural network”, [J] https://doi.org/10.1016/j.ins.2021.04.057














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









