







介绍:
实现了在android上使用opencv运行yolo。
平台:
android studio:3.5
android sdk:28
gradle plugin:3.5.0
gradle version:5.4.1
opencv android sdk:3.4.5
yolo:yolov2-tiny
运行于:android9
语言:java
创建项目并配置opencv:
需要注意的是:
OpenCV在3.3.1版本中开始支持Darknet的YOLO2,在3.4.2开始支持YOLO3。所以一定要选择好对应的版本。
OpenCV可以用c++的接口和java的接口。这里我们简单一些,直接使用java。
参考:
https://blog.csdn.net/babytiger/article/details/86614572
作者说:“如果没出来module name就说明你路径不对,但我尝试opencv4.0.1时就没有,退而求其次安了3.4.5”

其实,这是因为opencv工程的gradle是以apply plugin: 'com.android.application'配置的。
需要apply plugin: 'com.android.library'才能以module导入。


准备yolo模型:
yolo模型、参数等是在这里下载的:
https://github.com/AlexeyAB/darknet
为了方便,直接在手机下建了个文件夹yolo3,放入了模型、参数、和类型、以及测试图片。
读取模型记得要在AndroidManifest.xml里添加权限:
<uses-permission android:name="android.permission.READ_EXTERNAL_STORAGE"/>
<uses-permission android:name="android.permission.WRITE_EXTERNAL_STORAGE"/>申请权限的方法:
boolean isGrantExternalRW(Activity activity) {
if (Build.VERSION.SDK_INT >= Build.VERSION_CODES.M && activity.checkSelfPermission(
Manifest.permission.WRITE_EXTERNAL_STORAGE) != PackageManager.PERMISSION_GRANTED) {
activity.requestPermissions(new String[]{
Manifest.permission.READ_EXTERNAL_STORAGE,
Manifest.permission.WRITE_EXTERNAL_STORAGE
}, 1);
return false;
}
return true;
}之后在onCreate里调用。
加载yolo模型:
这里定义了一个类,具体方法参考了其他玩家的代码,但是找不到链接了。谢谢他们。再次感谢。
public class Yolo3 {
private List<String> classNamesVec;
private Net net;
private String filePath = Environment.getExternalStorageDirectory().getAbsolutePath()+"/yolo3/";
void init(Context activity){
try { //读取names
File file = new File(filePath+"coco.names");
InputStream instream = new FileInputStream(file);
InputStreamReader inputreader = new InputStreamReader(instream);
BufferedReader buffreader = new BufferedReader(inputreader);
String line;
while ((line = buffreader.readLine()) != null) {
classNamesVec.add(line);
}
instream.close();
}catch (Exception e) {
e.printStackTrace();
}
String cfgPath = filePath+"yolov2-tiny.cfg";
String weightsPath = filePath+"yolov2-tiny.weights";
net = Dnn.readNetFromDarknet(cfgPath,weightsPath);
if ( net.empty() ) {
Log.e("error","Reading Net error");
}
}
Bitmap test(){
String image_file = "dog.jpg";
Mat im = Imgcodecs.imread(filePath + image_file, Imgcodecs.IMREAD_COLOR);
// Imgproc.cvtColor(im, im, Imgproc.COLOR_BGR2RGB); //转换通道
Log.e("path:",filePath + image_file);
Mat out = draw(detection(im),im);
Bitmap bmp = Bitmap.createBitmap(out.cols(),out.rows(),Bitmap.Config.ARGB_8888);
org.opencv.android.Utils.matToBitmap(out,bmp);
return bmp;
}
Mat detection(Mat im){
if( im.empty() ) {
Log.e("error","Reading Image error");
}
Mat frame = new Mat();
Size sz1 = new Size(im.cols(),im.rows());
Imgproc.resize(im, frame, sz1);
Mat resized = new Mat();
Size sz = new Size(416,416);
Imgproc.resize(im, resized, sz);
float scale = 1.0F / 255.0F;
Mat inputBlob = Dnn.blobFromImage(im, scale, sz, new Scalar(0), false, false);
net.setInput(inputBlob, "data");
Mat detectionMat = net.forward("detection_out");
return detectionMat;
}
Mat draw(Mat detectionMat,Mat frame){
if( !detectionMat.empty() ) {
for (int i = 0; i < detectionMat.rows(); i++) {
int probability_index = 5;
int size = (int) (detectionMat.cols() * detectionMat.channels());
float[] data = new float[size];
detectionMat.get(i, 0, data);
float confidence = -1;
int objectClass = -1;
for (int j = 0; j < detectionMat.cols(); j++) {
if (j >= probability_index && confidence < data[j]) {
confidence = data[j];
objectClass = j - probability_index;
}
}
if (confidence > 0.3) {
// System.out.println("Result Object: "+i);
// for (int j=0; j < detectionMat.cols();j++)
// System.out.print(" "+j+":"+ data[j]);
// System.out.println("");
float x = data[0];
float y = data[1];
float width = data[2];
float height = data[3];
float xLeftBottom = (x - width / 2) * frame.cols();
float yLeftBottom = (y - height / 2) * frame.rows();
float xRightTop = (x + width / 2) * frame.cols();
float yRightTop = (y + height / 2) * frame.rows();
// System.out.println("Class: "+ names[objectClass]);
// System.out.println("Confidence: "+confidence);
// System.out.println("ROI: "+xLeftBottom+" "+yLeftBottom+" "+xRightTop+" "+yRightTop+"\n");
Imgproc.rectangle(frame, new Point(xLeftBottom, yLeftBottom),
new Point(xRightTop, yRightTop), new Scalar(0, 255, 0), 3);
}
}
}
return frame;
}
}测试yolo3
在视图里随便建了个button,在clickListener里调用test方法
yolo3.init(getApplicationContext());
button.setOnClickListener(new View.OnClickListener() {
@Override
public void onClick(View view) {
yolo3.init(getApplicationContext());
ImageView imageView = findViewById(R.id.imageView);
imageView.setImageBitmap(yolo3.test());
}
});记得必须要加载完OpenCV以后才能调用yolo3.init(getApplicationContext());加载模型。
加载OpenCV:OpenCVLoader.initDebug();
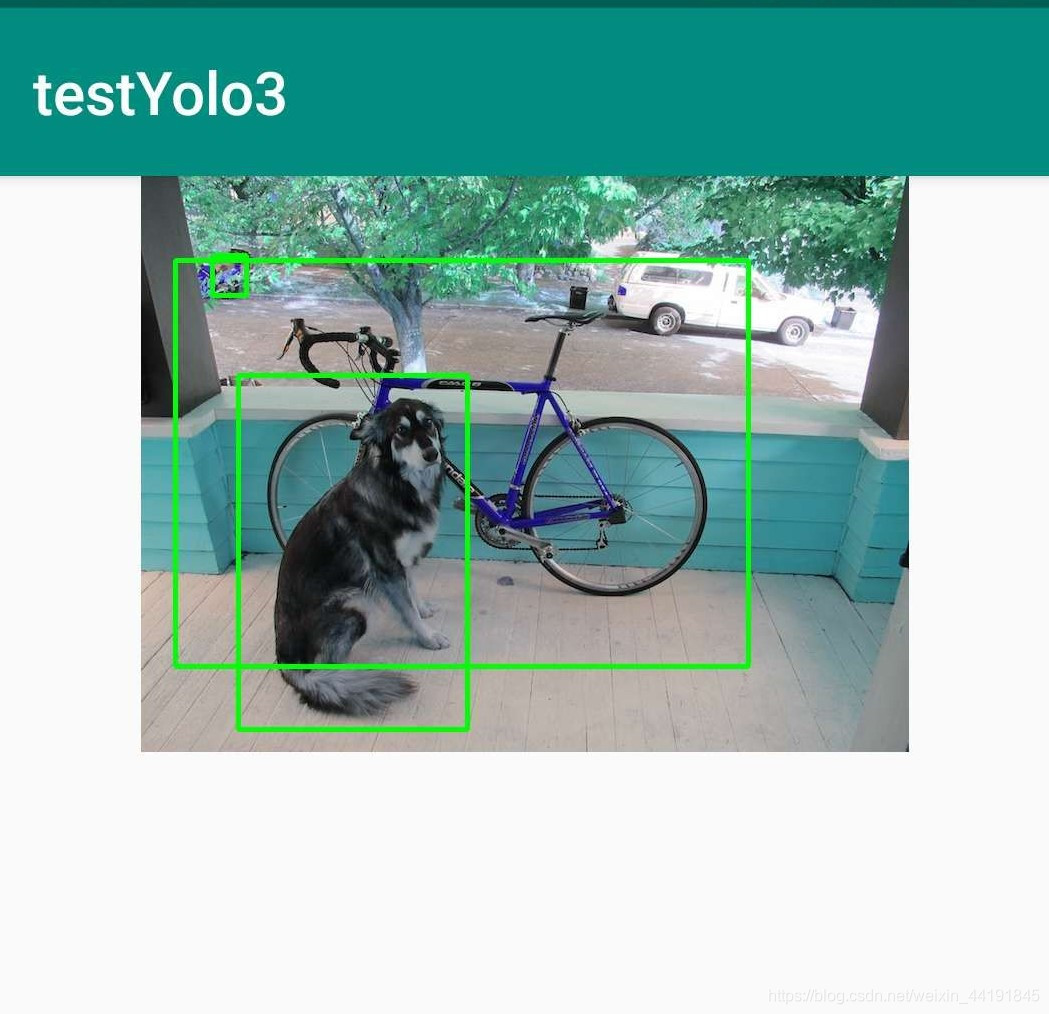 这么奇怪的颜色是因为OpenCV的通道顺序是BGR,所以要记得转换一下通道顺序。
这么奇怪的颜色是因为OpenCV的通道顺序是BGR,所以要记得转换一下通道顺序。
Imgproc.cvtColor(im, im, Imgproc.COLOR_BGR2RGB);这样对Mat调整后再显示就正常啦。
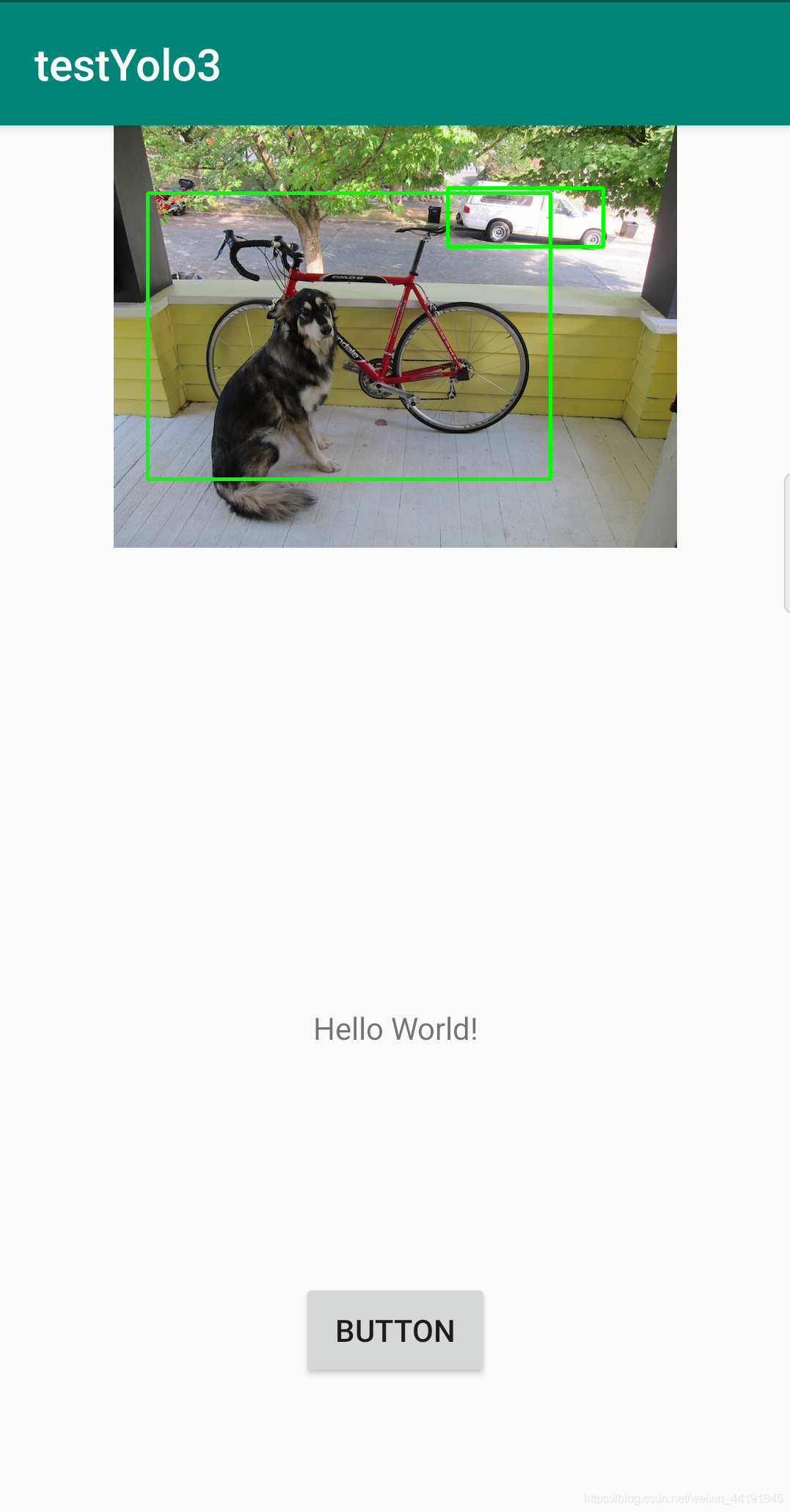
后记
完工啦














 668
668











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









