







前言
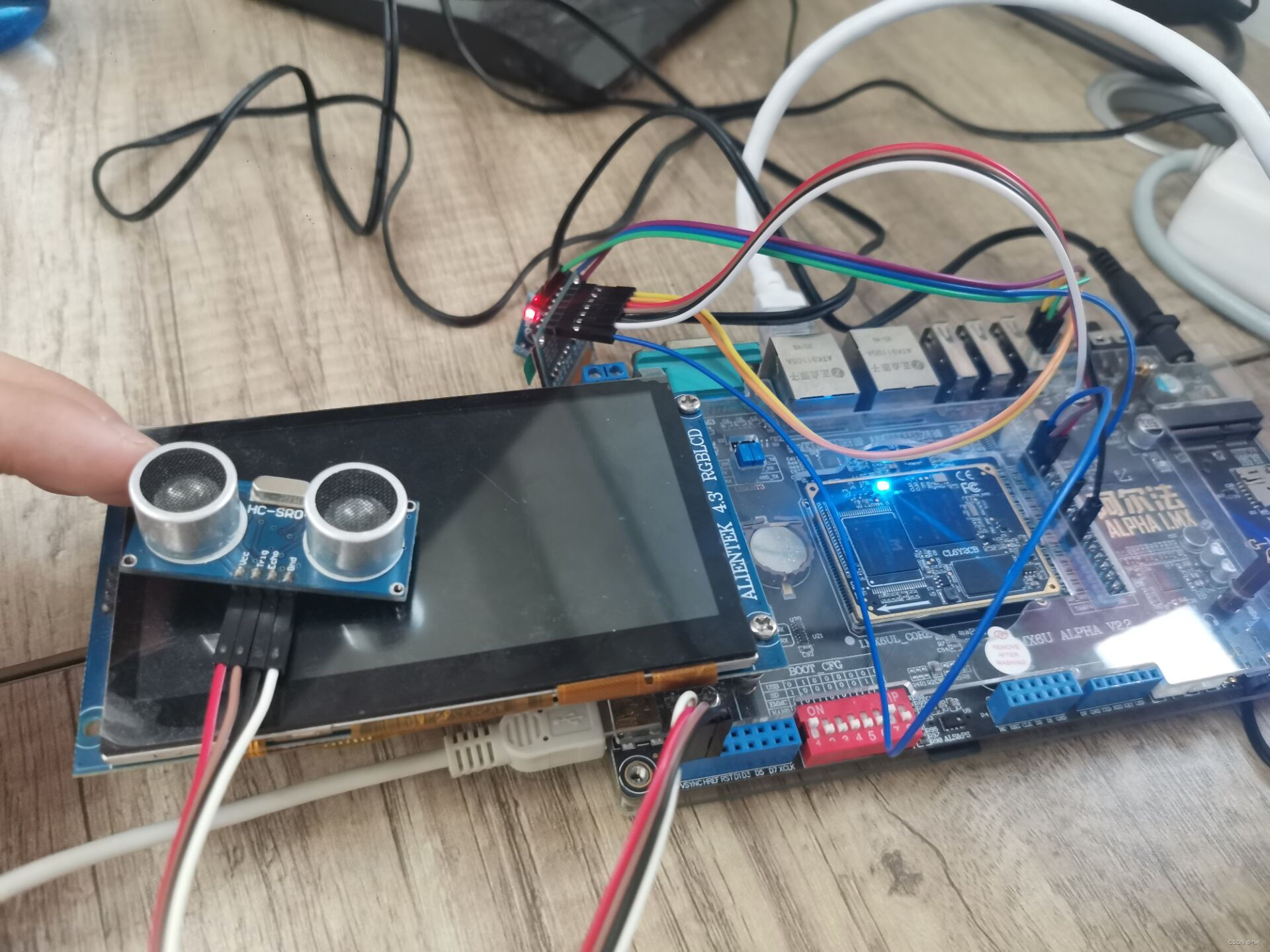
基于imx6ull的驱动开发移植超声波模块,所需硬件的接线如下:
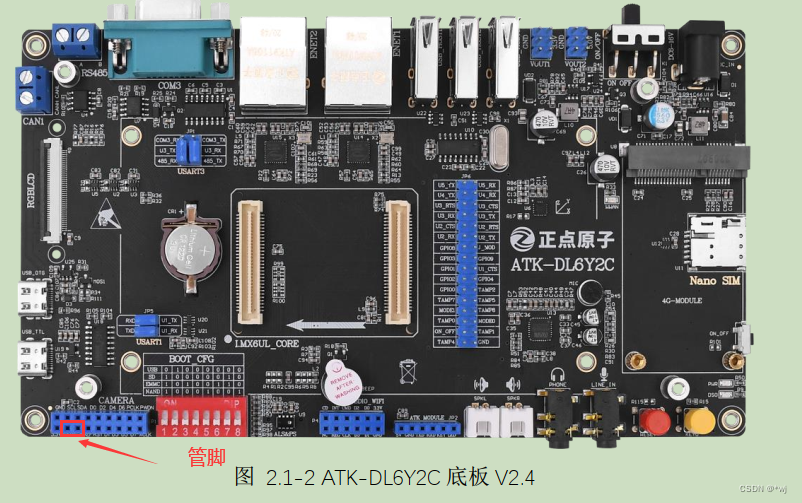
imx6ull开发板:正点原子阿尔法
超声波模块:4脚sr04
杜邦线:若干
接线如下:
3.3v —— 连接开发板的3.3V
trig —— 连接开发板的GPIO4_19
echo —— 连接开发板的GPIO4_20
GND —— 连接开发板的GND
查芯片手册:
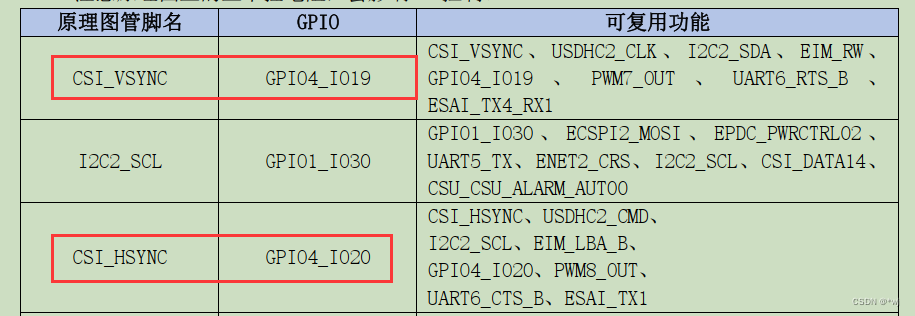
GPIO4_19管脚在正点原子开发板的对应的是CSI_VSYNC管脚
GPIO4_20管脚在正点原子开发板的对应的是CSI_HSYNC管脚
一、修改设备树文件
1.在设备树的根节点下面添加以下内容
sr04 { /* for imx6ull */
compatible = "my,sr04";
trig-gpios = <&gpio4 19 GPIO_ACTIVE_HIGH>;
echo-gpios = <&gpio4 20 GPIO_ACTIVE_HIGH>;
};
2.编译设备树
然后重新编译设备树文件,将新生成的.dtb文件拷贝到网络方式启动的文件夹下面【或者直接烧写进flash中,从flash启动】
make dtbs
二、代码
目录结构如下:
1.驱动代码
新建一个sr04driver.c文件,输入以下内容:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <asm/mach/map.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/io.h>
#include <linux/device.h>
#include <linux/timer.h>
// #include <asm/spinlock.h>
#include <linux/jiffies.h>
#include <linux/platform_device.h>
#include <linux/of_irq.h>
#include <linux/wait.h>
// #include <linux/sched/signal.h>
#include <linux/poll.h>
// #include <asm/atomic.h>
#include <linux/atomic.h>
static int major=0;/*主设备号*/
static struct class *sr04_class;
static struct gpio_desc *sr04_echo;
static struct gpio_desc *sr04_trig;
static int irq;
static u64 sr04_data_ns = 0;
static wait_queue_head_t sr04_wq;
static ssize_t sr04_read (struct file *file, char __user *buf, size_t size, loff_t *off)
{
int err;
int timeout;
/*发出至少10us的触发信号*/
gpiod_set_value(sr04_trig, 1);
udelay(15);
gpiod_set_value(sr04_trig, 0);
/* 等待数据 */
timeout = wait_event_interruptible_timeout(sr04_wq, sr04_data_ns, HZ);
if (timeout)
{
err = copy_to_user(buf, &sr04_data_ns, 4);
sr04_data_ns = 0;
return 4;
}
else
{
return -EAGAIN;
}
return 0;
}
static int sr04_open (struct inode *inode, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
static struct file_operations sr04_ops={
.owner = THIS_MODULE,
.open = sr04_open,
.read = sr04_read,
};
static irqreturn_t sr04_isr(int irq, void *dev_id)
{
int val = gpiod_get_value(sr04_echo);
if(val)
{
/*上升沿*/
sr04_data_ns = ktime_get_ns();
}
else
{
/*下降沿*/
sr04_data_ns = ktime_get_ns() - sr04_data_ns;
/* 2. 唤醒APP:去同一个链表把APP唤醒 */
wake_up(&sr04_wq);
}
return IRQ_HANDLED; // IRQ_WAKE_THREAD;
}
static int sr04_probe(struct platform_device *pdev)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
/*1.获取硬件信息*/
sr04_echo=gpiod_get(&pdev->dev, "echo", GPIOD_IN);
if (IS_ERR(sr04_echo)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
}
sr04_trig=gpiod_get(&pdev->dev, "trig", GPIOD_OUT_LOW);
if (IS_ERR(sr04_trig)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
}
/*得到irq*/
irq = gpiod_to_irq(sr04_echo);
/*申请中断并设置为双边沿触发*/
err = request_irq(irq, sr04_isr, IRQF_TRIGGER_RISING|IRQF_TRIGGER_FALLING, "sr04", NULL);
if (err != 0) {
printk("request_irq is err\n");
}
/*2.创建设备节点*/
device_create(sr04_class, NULL, MKDEV(major, 0), NULL, "sr04");
return 0;
}
static int sr04_remove(struct platform_device *pdev)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(sr04_class, MKDEV(major, 0));
free_irq(irq, NULL);
gpiod_put(sr04_trig);
gpiod_put(sr04_echo);
return 0;
}
static const struct of_device_id my_sr04[] = {
{ .compatible = "my,sr04" },
{ },
};
static struct platform_driver sr04={
.driver = {
.name = "sr04",
.of_match_table = my_sr04,
},
.probe = sr04_probe,
.remove = sr04_remove,
};
static int __init sr04_init(void)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
/*确定主设备号*/
major=register_chrdev(major, "mysr04", &sr04_ops);
/*创建类*/
sr04_class=class_create(THIS_MODULE, "sr04");
if (IS_ERR(sr04_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "mysr04");
return PTR_ERR(sr04_class);
}
init_waitqueue_head(&sr04_wq);//初始化队列
err=platform_driver_register(&sr04);
return 0;
}
static void __exit sr04_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
platform_driver_unregister(&sr04);
class_destroy(sr04_class);
unregister_chrdev(major, "mysr04");
}
module_init(sr04_init);
module_exit(sr04_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("wj");
2.APP程序
新建一个sr04App.c,输入以下内容:
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
#include <unistd.h>
/*
* ./sr04_test /dev/sr04
*
*/
int main(int argc, char **argv)
{
int fd;
int ns;
int i;
// /* 1. 判断参数 */
// if (argc != 2)
// {
// printf("Usage: %s <dev>\n", argv[0]);
// return -1;
// }
/* 2. 打开文件 */
// fd = open(argv[1], O_RDWR | O_NONBLOCK);
fd = open(argv[1], O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
while (1)
{
if (read(fd, &ns, 4) == 4)
{
printf("get distance: %d ns\n", ns);
printf("get distance: %d mm\n", ns*340/2/1000000); /* mm */
}
else
printf("get distance: -1\n");
sleep(1);
}
close(fd);
return 0;
}
3.Makefile
新建一个Makefile,输入以下内容
KERNELDIR := /home/wj/linux/alientek-linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
CURRENT_PATH := $(shell pwd)
obj-m := sr04driver.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
三、编译
1.编译驱动程序
make
将生成的sr04driver.ko文件拷贝到自己的根文件目录中
2.编译测试应用
arm-linux-gnueabihf-gcc -o sr04App sr04App.c
将生成的sro4APP可执行程序拷贝到自己的根文件目录中
四、上机运行
cd /驱动模块所在目录
insmod sr04driver.ko
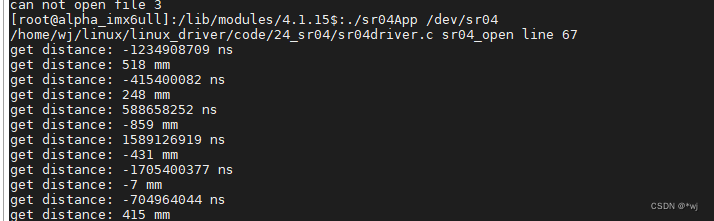
./sr04App /dev/sr04
运行结果如下:
参考链接:参考链接















 759
759











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









