









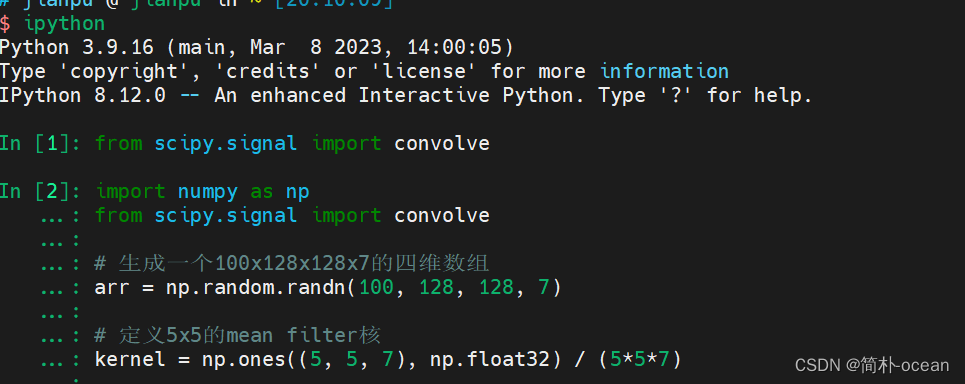
在使用 python 以下的命令时,
from scipy.signal import convolve
出现报错:
/home/anaconda3/envs/norm/lib/python3.9/site-packages/scipy/linalg/../../../../libstdc++.so.6: version `GLIBCXX_3.4.30' not found (required by /home/anaconda3/envs/norm/lib/python3.9/site-packages/scipy/fft/_pocketfft/pypocketfft.cpython-39-x86_64-linux-gnu.so)
在这里,使用了从网上搜到的以下方法:
sudo apt-get update
sudo apt-get upgrade
sudo apt-get install libstdc++6
但是并没有啥用,上述办法是通过重新安装libstdc++6来解决的。但是我通过输入以下命令时:
strings /usr/lib/x86_64-linux-gnu/libstdc++.so.6 | grep GLIBCXX
得到以下内容:
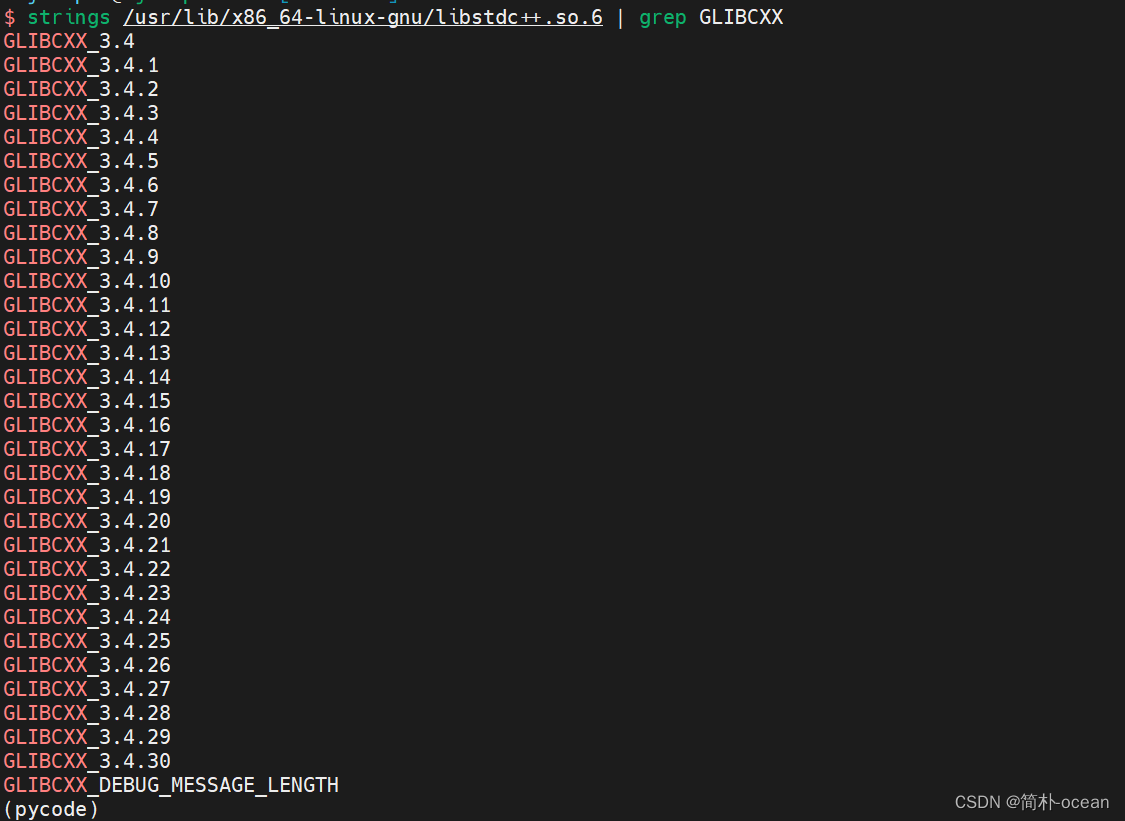
可以发现,GLIBCXX_3.4.30是存在的
所以,并不是缺失导致报错的。
下面介绍解决的办法:
ln -sf /usr/lib/x86_64-linux-gnu/libstdc++.so.6 /home/yourenvname/anaconda3/envs/pycode/bin/../lib/libstdc++.so.6
既然已经存在了上述目标文件,所以只需要重新创建软连接使得anaconda3 能够识别到这个目标文件就可以了。
以上命令需要修改的地方,在于yourenvname,根据自己的环境名称进行修改,

这样就没有报错啦,重新输入python命令,发现没有报错了
参考
https://github.com/pybind/pybind11/discussions/3453
https://askubuntu.com/questions/1418016/glibcxx-3-4-30-not-found-in-conda-environment
https://stackoverflow.com/questions/48453497/anaconda-libstdc-so-6-version-glibcxx-3-4-20-not-found


















 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











