







 本文介绍了Abaqus中隐式求解法和显式求解法的特点及应用案例。隐式求解法通过迭代计算确保任何增量大小下的稳定性;显式求解法则基于中心差分法快速推进时间,但需要较小的时间步长以保证结果可靠性。
本文介绍了Abaqus中隐式求解法和显式求解法的特点及应用案例。隐式求解法通过迭代计算确保任何增量大小下的稳定性;显式求解法则基于中心差分法快速推进时间,但需要较小的时间步长以保证结果可靠性。
Abaqus隐式求解和显式求解
1.隐式求解法
1.1隐式求解法的特点:
利用迭代求解下个增量步的未知量
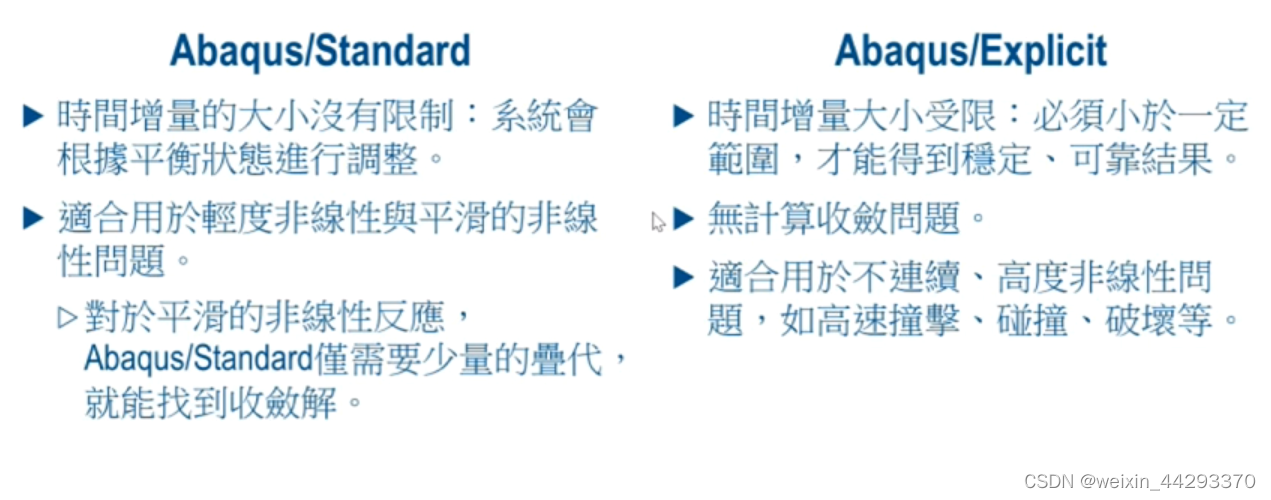
无条件稳定,任何大小的增量皆可让结果在一定范围内
有计算收敛问题
1.2隐式求解法案例:
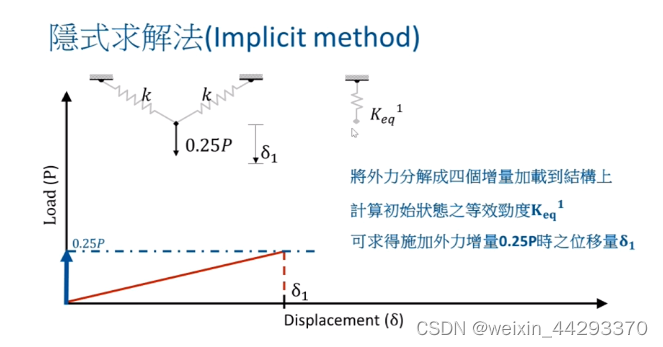
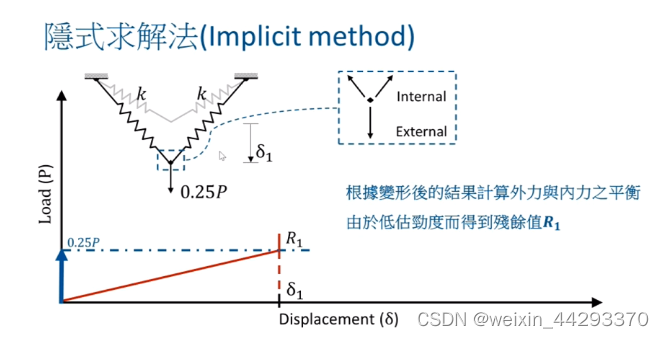
例如,将外力P分解成4个增量加载到结构上,结合初始劲度系数得到位移量σ1。但是根据节点内外力平衡来计算,0.25P的外力实际上没法带来σ1的位移量,因为随着节点下移,弹簧的劲度系数也在增加。这就带来了一个低估劲度系数而引起的残余值R1。
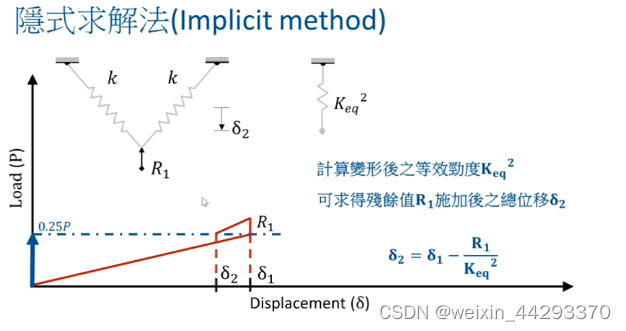
计算残余值R1反作用在节点带来的最终位移σ2。重复以上过程直到残差值符合我们的设定要求。
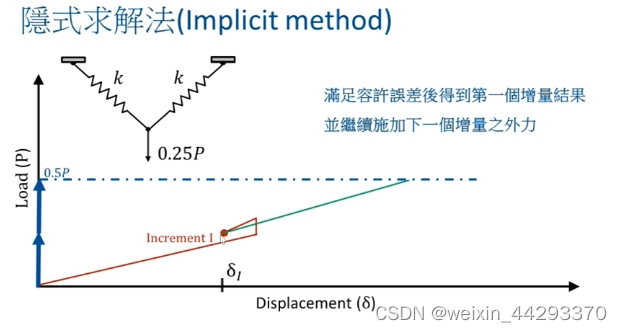
满足残差需求之后得到第一个增量结果Increment1并继续施加下一个增量之外力。
结果展示:
拆分为两个增量步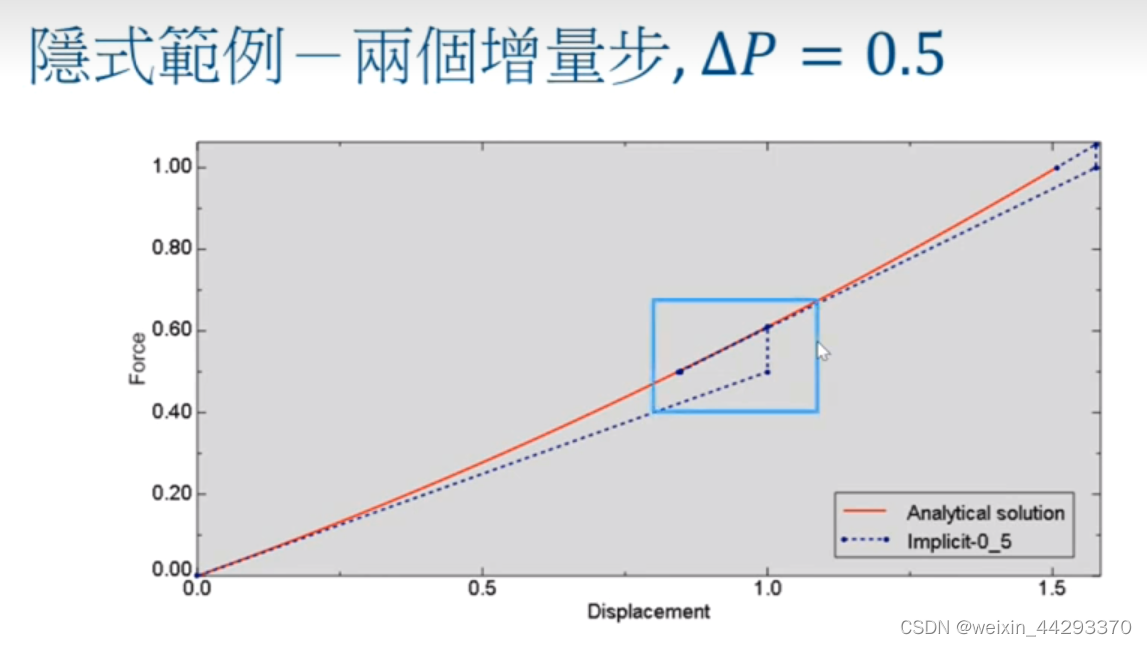
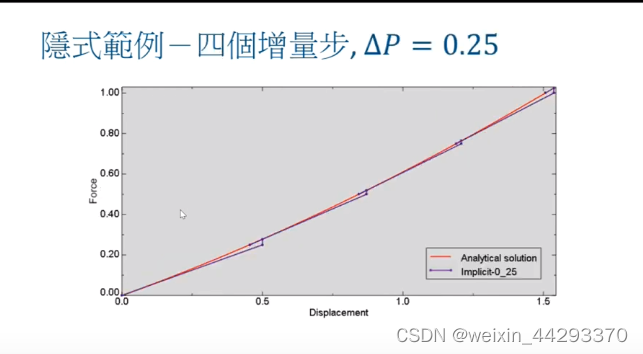
拆分为四个增量步
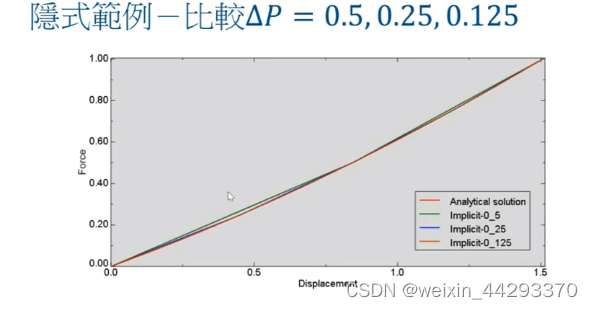
无论是拆分成两个,四个还是八个增量步,结果都是稳定的
2.显式求解法
2.1显式求解法的特点:
仅考虑前一时刻之状态
有条件稳定,增量必须小于一临界值,才会提供可靠结果
无计算收敛问题
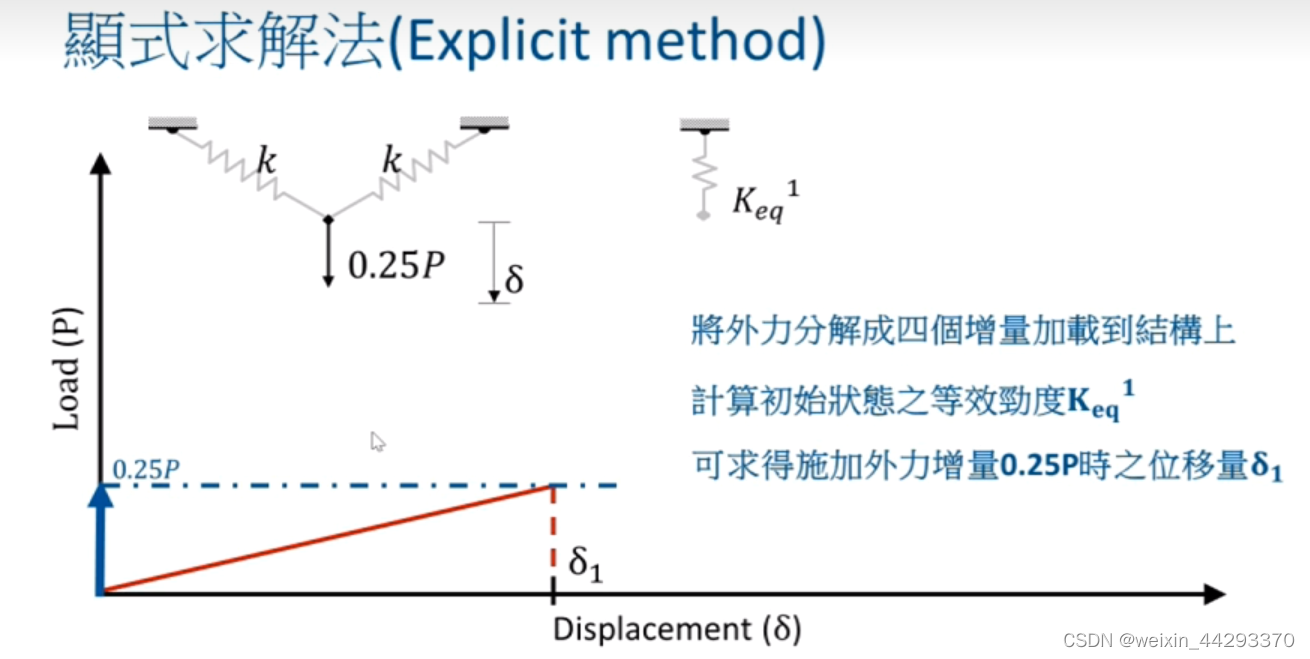
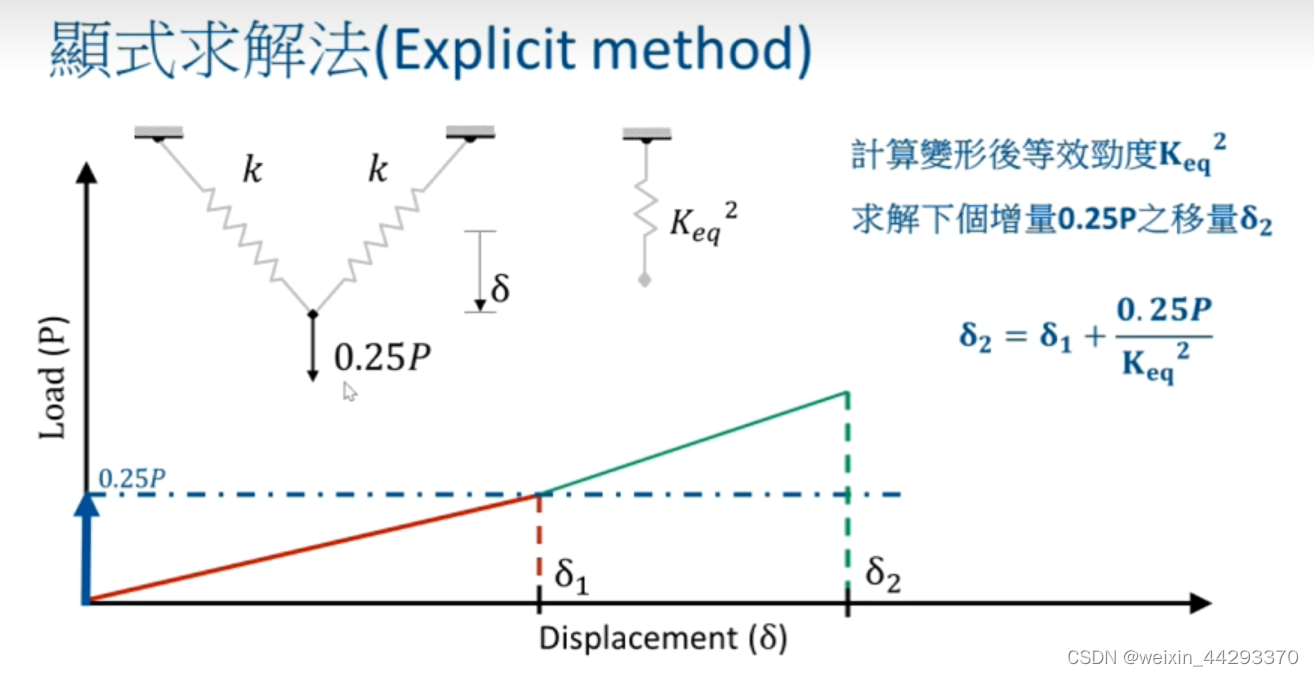
2.2 显式求解法的案例
同样把外力分成四个增量加载到节点上,结合初始劲度系数,可以得到位移量σ1。此后不在考虑静力平衡的迭代过程,直接进行下一个增量步的计算
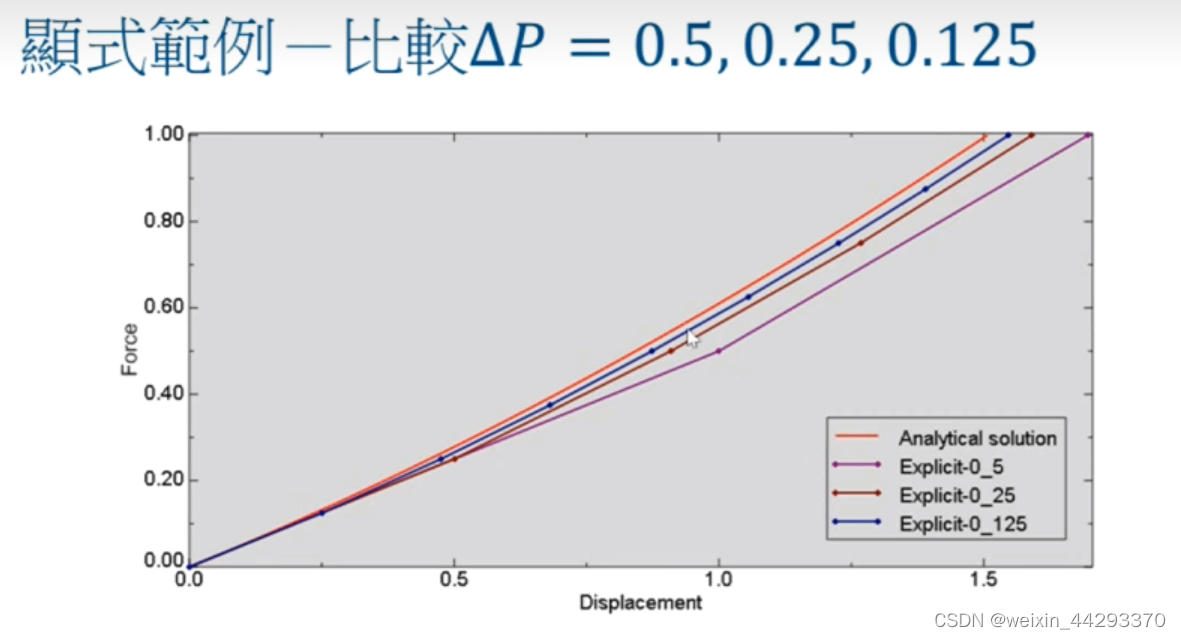
结果展示:
不同的增量步大小会带来不同的误差。误差是积累起来的。
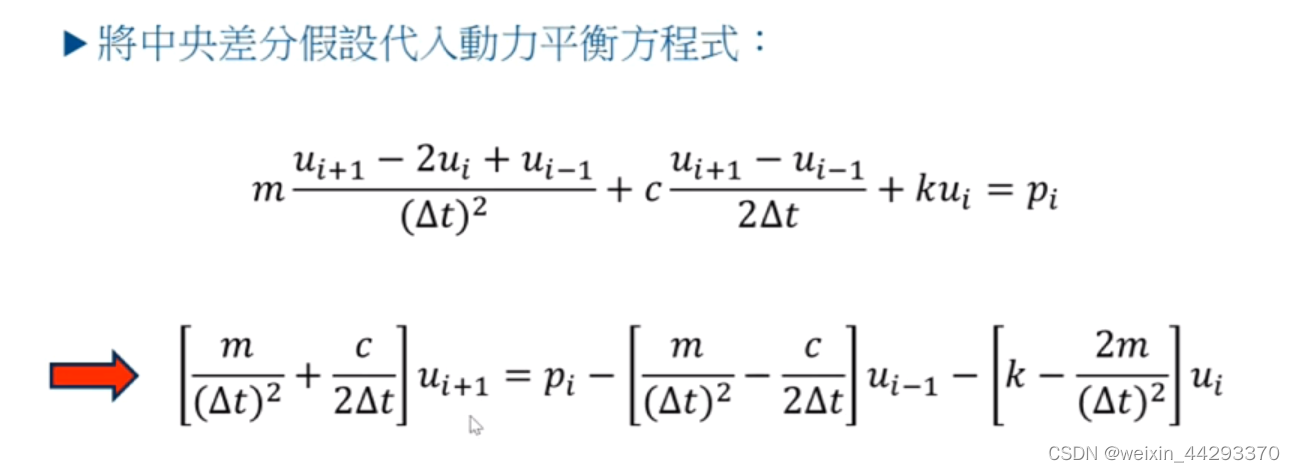
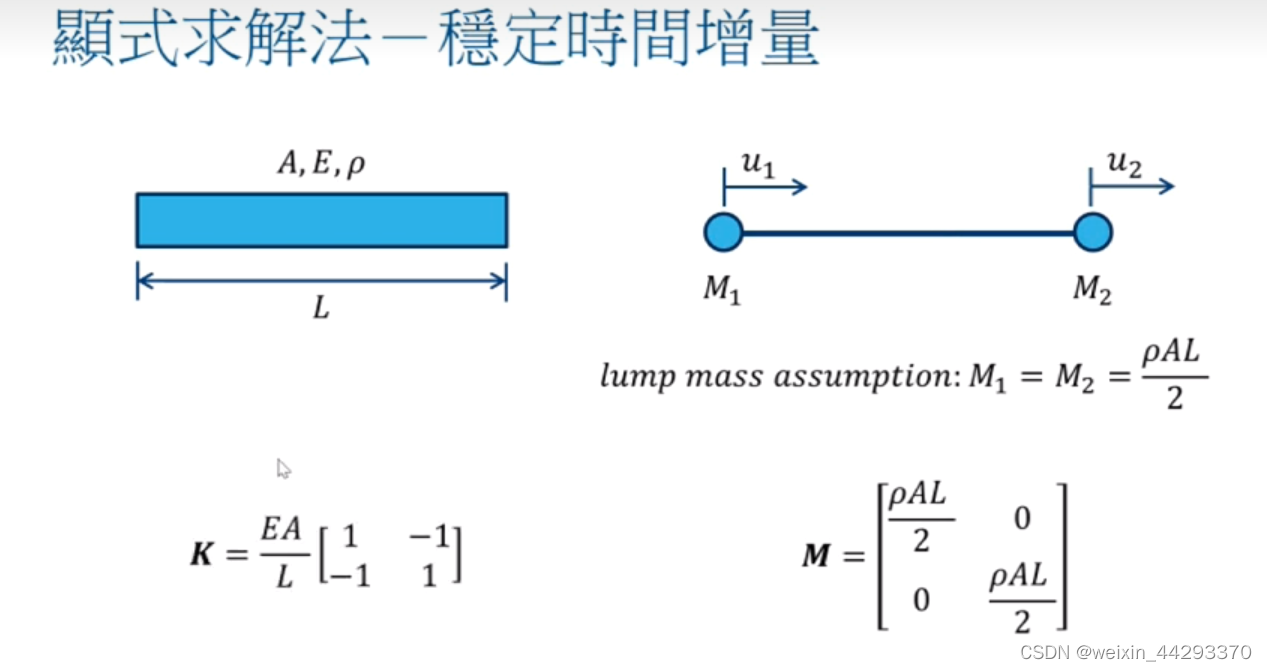
2.3显式求解法的原理
显示求解法采用中心差分法来计算。可以发现,下一时刻的位移ui+1只和前面的状态有关,所以不需要考虑迭代收敛。
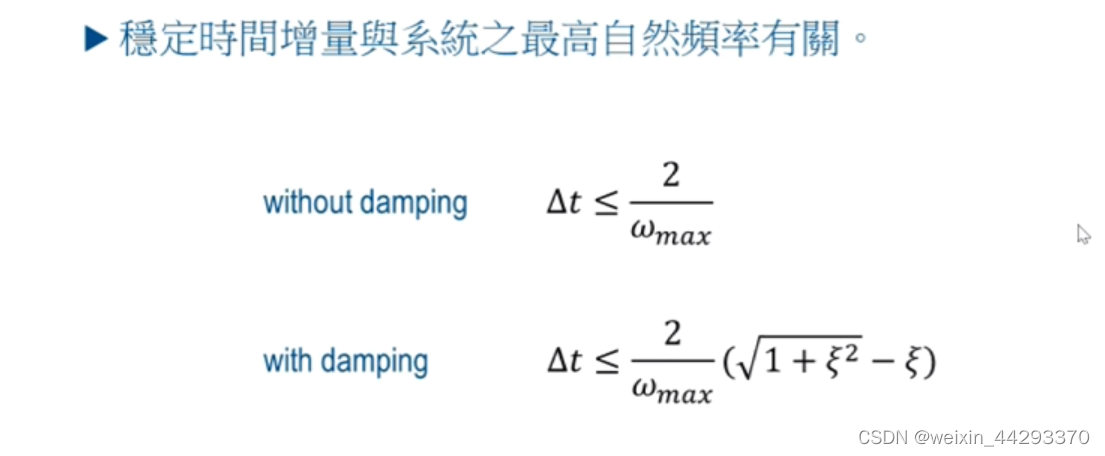
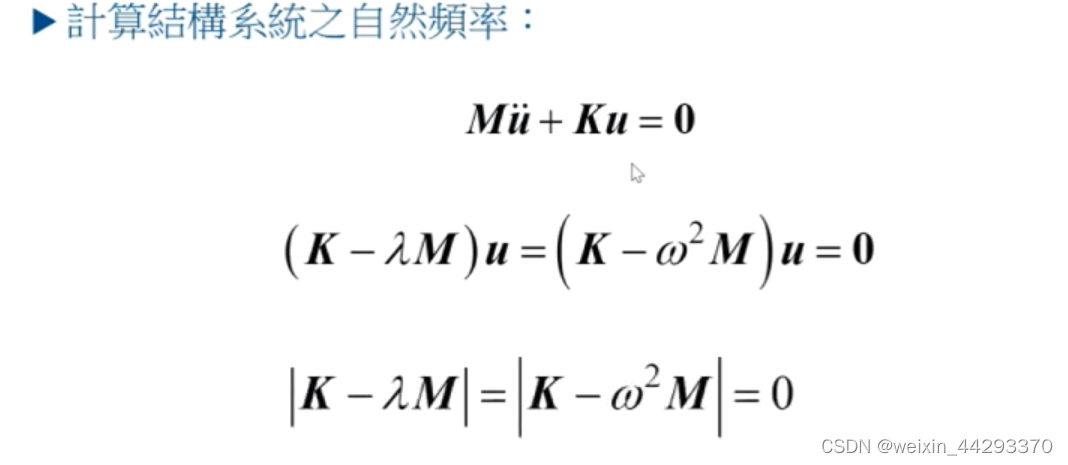
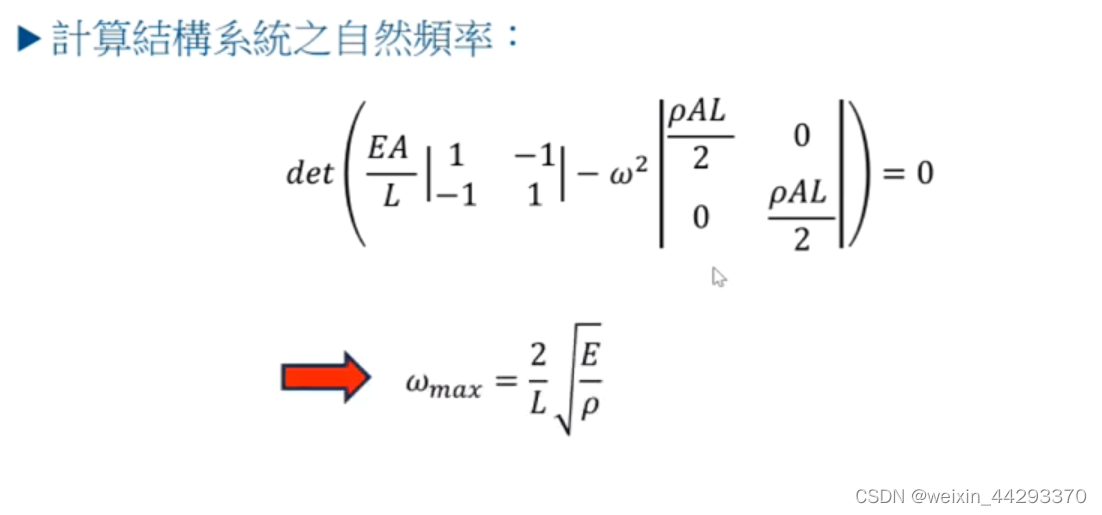
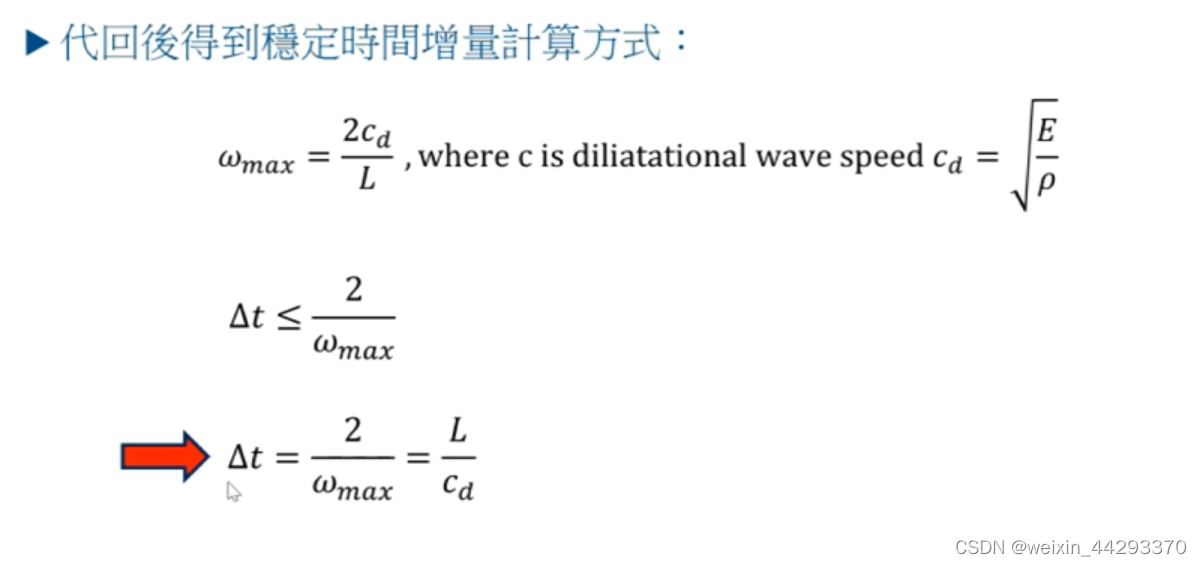
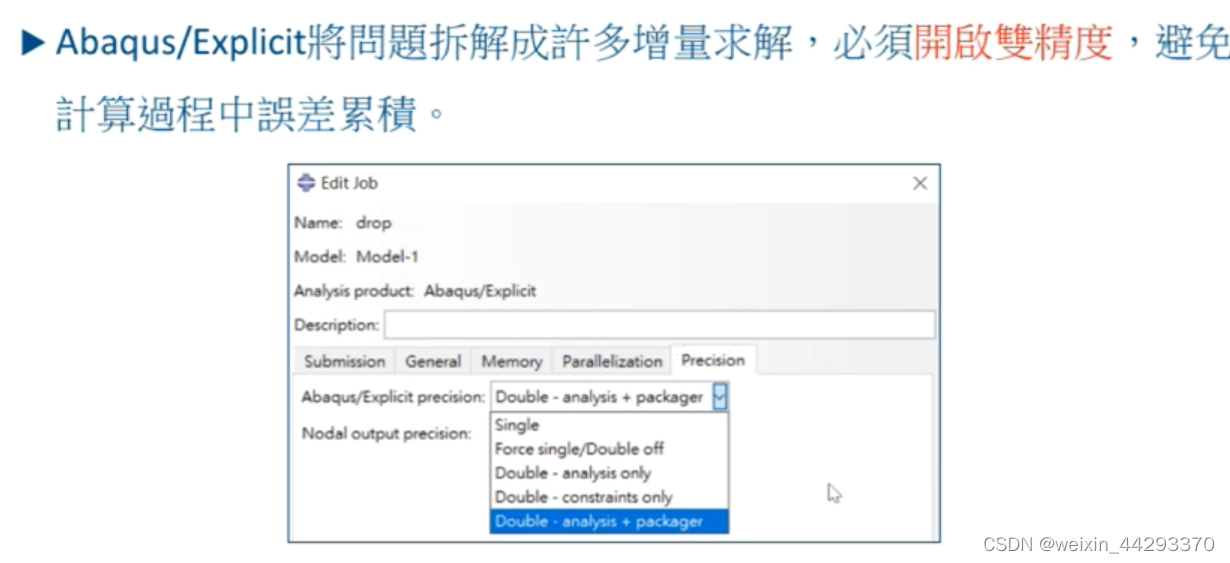
由此可见,显式求解法十分依赖中心差分的精度,这就要求时间增量不能太大,一般我们利用稳定时间增量来确定显示求解法增量步的数量级。
采用显式求解法建议打开双精度。
3.隐式求解法和显式求解法的对比

















 8801
8801

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









