







文章目录
一、解读SwinIR模型文件:network_swinir.py

1. 带有相对为位置偏置的(W-MSA)
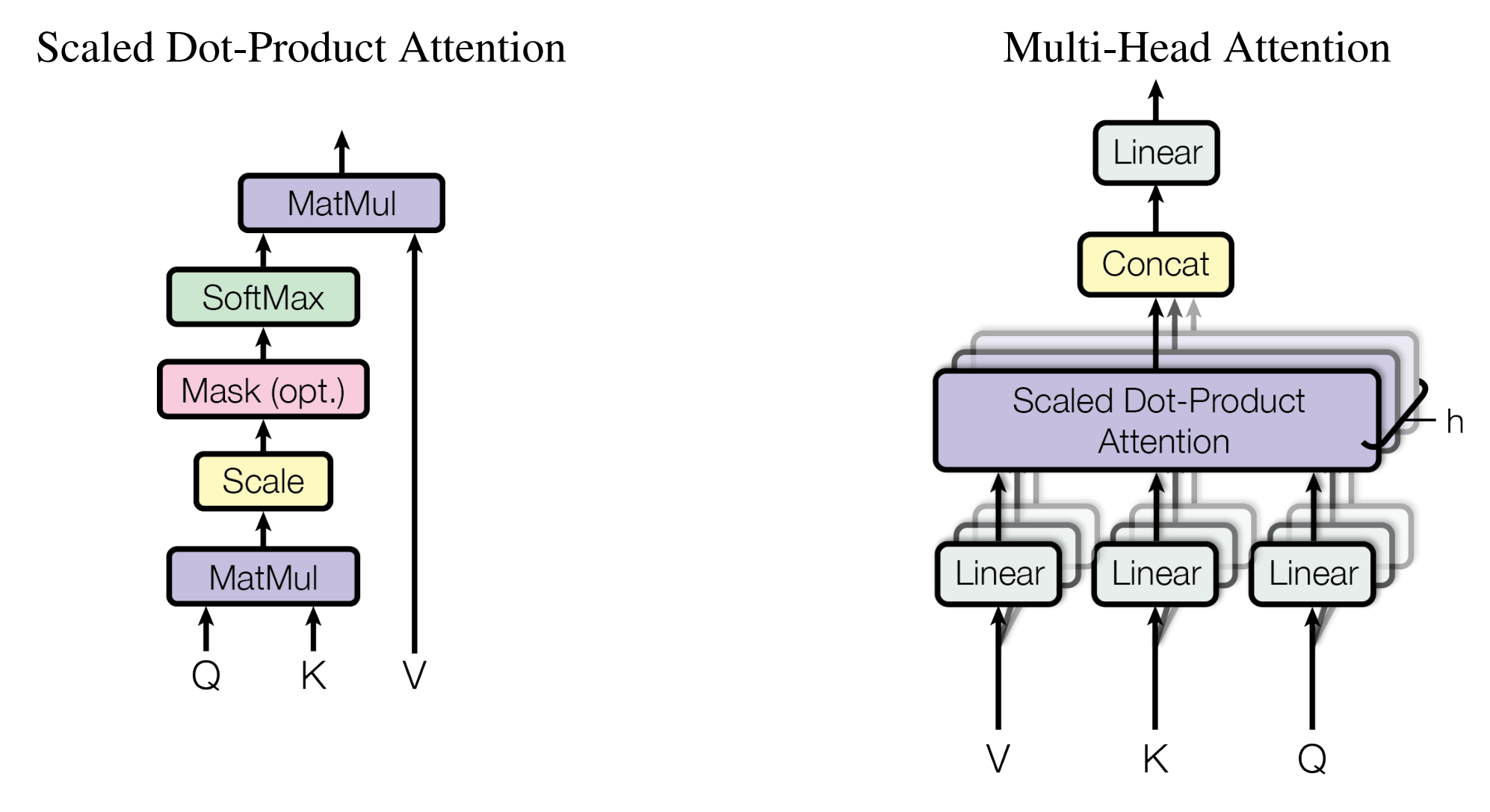
如何在图像中加入W-MSA
Swin Transformer之相对位置编码详解
import torch
import torch.nn as nn
from timm.models.layers import trunc_normal_
class WindowAttention(nn.Module):
r""" (带有相对位置偏置的基于窗口的多头自注意力(W-MSA))
Window based multi-head self attention (W-MSA) module with relative position bias. W-MSA
It supports both of shifted and non-shifted window.
Args:
dim (int): Number of input channels. (输入通道数)
window_size (tuple[int]): The height and width of the window. (窗口的尺寸)
num_heads (int): Number of attention heads. (MSA的头数)
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True (Q、K、V是否需要偏置)
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set ()
attn_drop (float, optional): Dropout ratio of attention weight. Default: 0.0 (是否使用dropout)
proj_drop (float, optional): Dropout ratio of output. Default: 0.0
"""
def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.):
super().__init__()
self.dim = dim # 180
self.window_size = window_size # Wh, Ww:(8, 8)
self.num_heads = num_heads # 6
head_dim = dim // num_heads # 160//6 = 30
self.scale = qk_scale or head_dim ** -0.5 # 1/sqrt(30)
# define a parameter table of relative position bias(定义相对位置偏置的参数表)
self.relative_position_bias_table = nn.Parameter(
torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1),
num_heads)) # [225, 6]= [(2*8-1) * (2*8-1), 6]
# get pair-wise relative position index for each token inside the window(获取窗口内每个token的成对相对位置索引)
coords_h = torch.arange(self.window_size[0]) # (8, )
coords_w = torch.arange(self.window_size[1]) # (8, )
# torch.meshgrid(a, b):生成网格,可以用于生成坐标,行数为第一个输入张量的元素个数,列数为第二个输入张量的元素个数
coords = torch.stack(torch.meshgrid([coords_h, coords_w], indexing='ij')) # (2, Wh, Ww) (2, 8, 8)
coords_flatten = torch.flatten(coords, 1) # (2, Wh*Ww) (2, 64)=(2, 8*8)
relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None,
:] # (2, Wh*Ww, Wh*Ww) (2, 64, 64)= (2, 61, 1) - (2, 1, 64)
relative_coords = relative_coords.permute(1, 2, 0).contiguous() # (Wh*Ww, Wh*Ww, 2)
relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0
relative_coords[:, :, 1] += self.window_size[1] - 1
relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1
relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww
self.register_buffer("relative_position_index", relative_position_index)
self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias) # 180 ---> 540
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
trunc_normal_(self.relative_position_bias_table, std=.02) # 截断正太分布
self.softmax = nn.Softmax(dim=-1)
def forward(self, x, mask=None):
"""
Args:
x: input features with shape of (num_windows*B, N, C) (2145, 64, 180)
mask: (0/-inf) mask with shape of (num_windows, Wh*Ww, Wh*Ww) or None
"""
B_, N, C = x.shape # 2145, 64, 180
# (2145, 64, 180) --> (2415, 64, 540) ---> (2145, 64, 3, 6, 30) = (3, 2145, 6, 64, 30) :(3, B_, head, N, head_dim)
qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
q, k, v = qkv[0], qkv[1], qkv[2] # [2145, 6, 64, 30] make torchscript happy (cannot use tensor as tuple)
q = q * self.scale
attn = (q @ k.transpose(-2, -1)) # [2145, 6, 64, 30] @ [2145, 6, 30, 64] = [2145, 6, 64, 64]
relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(
self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1],
-1) # [64, 64, 6] [Wh*Ww,Wh*Ww,nH]
relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # [64, 64, 6] --> [6, 64, 64] [nH, Wh*Ww, Wh*Ww]
attn = attn + relative_position_bias.unsqueeze(0) # [2145, 6, 64, 30] + [1, 6, 64, 64] = [2145, 6, 64, 30]
if mask is not None:
nW = mask.shape[0] # 2145
# [1, 2145, 6, 64, 64] + [1, 2145, 1, 64, 64] = [1, 2145, 6, 64, 64]
attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0)
attn = attn.view(-1, self.num_heads, N, N) # [1, 2145, 6, 64, 64] --> [2145, 6, 64, 64]
attn = self.softmax(attn)
else:
attn = self.softmax(attn)
attn = self.attn_drop(attn)
# [2145, 6, 64, 64] @ [2145, 6, 64, 30] = [2145, 6, 64, 30] --> [2145, 64, 6, 30] --> [2145, 64, 180]
x = (attn @ v).transpose(1, 2).reshape(B_, N, C)
x = self.proj(x) # [2145, 64, 180] --> [2145, 64, 180]
x = self.proj_drop(x)
return x
def extra_repr(self) -> str:
return f'dim={self.dim}, window_size={self.window_size}, num_heads={self.num_heads}'
def flops(self, N):
# calculate flops for 1 window with token length of N
flops = 0
# qkv = self.qkv(x)
flops += N * self.dim * 3 * self.dim
# attn = (q @ k.transpose(-2, -1))
flops += self.num_heads * N * (self.dim // self.num_heads) * N
# x = (attn @ v)
flops += self.num_heads * N * N * (self.dim // self.num_heads)
# x = self.proj(x)
flops += N * self.dim * self.dim
return flops
def window_partition(x, window_size):
""" (将输入张量x按照指定的窗口大小window_size划分成小的窗口。)
Args:
x: (B, H, W, C)
window_size (int): window size
Returns:
windows: (num_windows*B, window_size, window_size, C)
"""
B, H, W, C = x.shape
x = x.view(B, H // window_size, window_size, W // window_size, window_size, C)
windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C)
return windows
def calculate_mask(x_size):
# calculate attention mask for SW-MSA
H, W = x_size
window_size, shift_size = 8, 0
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
h_slices = (slice(0, window_size),
slice(-window_size, -shift_size),
slice(-shift_size, None))
w_slices = (slice(0, -window_size),
slice(-window_size, -shift_size),
slice(-shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, window_size) # nW, window_size, window_size, 1
mask_windows = mask_windows.view(-1, window_size * window_size)
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
return attn_mask
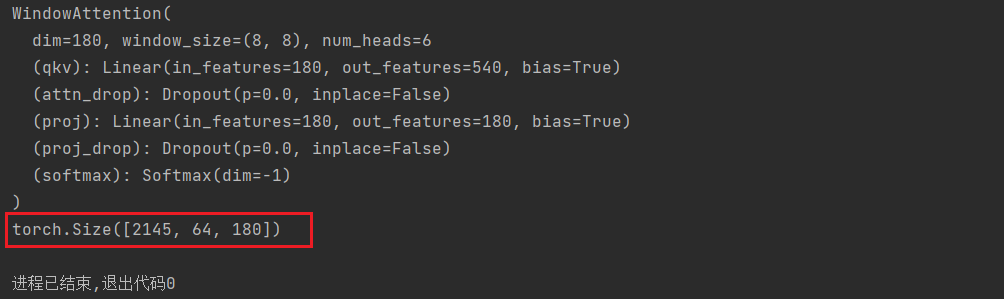
if __name__ == '__main__':
attn = WindowAttention(dim=180, window_size=(8, 8), num_heads=6,
qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.)
print(attn)
x_windows = torch.randn(2145, 64, 180)
attn_mask = torch.randn(2145, 64, 64)
attn_windows = attn(x_windows, mask=attn_mask)
print(attn_windows.shape)
2. STL(Swin Transformer)
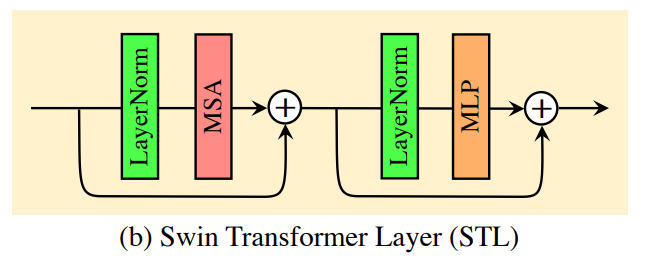
class SwinTransformerBlock(nn.Module):
r""" Swin Transformer Block.
Args:
dim (int): Number of input channels.
input_resolution (tuple[int]): Input resulotion.
num_heads (int): Number of attention heads.
window_size (int): Window size.
shift_size (int): Shift size for SW-MSA.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.
drop (float, optional): Dropout rate. Default: 0.0
attn_drop (float, optional): Attention dropout rate. Default: 0.0
drop_path (float, optional): Stochastic depth rate. Default: 0.0
act_layer (nn.Module, optional): Activation layer. Default: nn.GELU
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
"""
def __init__(self, dim, input_resolution, num_heads, window_size=7, shift_size=0,
mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0.,
act_layer=nn.GELU, norm_layer=nn.LayerNorm):
super().__init__()
self.dim = dim # 180
self.input_resolution = input_resolution # (64, 64)
self.num_heads = num_heads # 6
self.window_size = window_size # 8
self.shift_size = shift_size # 0
self.mlp_ratio = mlp_ratio # 2
# 如果输入图像的尺寸小于窗口划分的尺寸,那么窗口就是找个输入图像的尺寸
if min(self.input_resolution) <= self.window_size:
# if window size is larger than input resolution, we don't partition(分区) windows
self.shift_size = 0
self.window_size = min(self.input_resolution)
assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size"
self.norm1 = norm_layer(dim)
self.attn = WindowAttention(
dim, window_size=to_2tuple(self.window_size), num_heads=num_heads,
qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop)
self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()
self.norm2 = norm_layer(dim)
mlp_hidden_dim = int(dim * mlp_ratio)
self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop)
# 根据移位窗口,来决定是否使用mask
if self.shift_size > 0:
attn_mask = self.calculate_mask(self.input_resolution)
else:
attn_mask = None
self.register_buffer("attn_mask", attn_mask)
def calculate_mask(self, x_size):
# calculate attention mask for SW-MSA
H, W = x_size
img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1
# slice(起始位置索引,结束位置索引) :从已有的数组中返回选定的元素(数组单元的截取) (左开右闭)
h_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
w_slices = (slice(0, -self.window_size),
slice(-self.window_size, -self.shift_size),
slice(-self.shift_size, None))
cnt = 0
for h in h_slices:
for w in w_slices:
img_mask[:, h, w, :] = cnt
cnt += 1
mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1
mask_windows = mask_windows.view(-1, self.window_size * self.window_size)
attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2)
attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0))
return attn_mask
def forward(self, x, x_size):
H, W = x_size
B, L, C = x.shape
# assert L == H * W, "input feature has wrong size"
shortcut = x # [1, 137289, 180]
x = self.norm1(x)
x = x.view(B, H, W, C) # [1, 264, 520, 180]
# cyclic shift
if self.shift_size > 0:
shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2))
else:
shifted_x = x
# partition windows [1, 264, 520, 180] ---> [2145, 8, 8, 180]
x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C
x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C
# W-MSA/SW-MSA (to be compatible for testing on images whose shapes are the multiple of window size
# 根据测试图像形状是否为窗口大小倍数, 使用W-MSA/SW-MSA
if self.input_resolution == x_size:
attn_windows = self.attn(x_windows, mask=self.attn_mask) # nW*B, window_size*window_size, C
else:
attn_windows = self.attn(x_windows, mask=self.calculate_mask(x_size).to(x.device)) # [2145, 64, 180]
# merge windows 在把窗口拼到一起
attn_windows = attn_windows.view(-1, self.window_size, self.window_size,
C) # [2145, 64, 180] --> [2145, 8, 8, 180]
shifted_x = window_reverse(attn_windows, self.window_size, H,
W) # B H' W' C [2145, 8, 8, 180] --> [1, 264, 520, 180]
# reverse cyclic shift
if self.shift_size > 0:
x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2))
else:
x = shifted_x
x = x.view(B, H * W, C)
# FFN STL层的前向传播过程
x = shortcut + self.drop_path(x)
x = x + self.drop_path(self.mlp(self.norm2(x)))
return x
def extra_repr(self) -> str:
return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \
f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}"
def flops(self):
flops = 0
H, W = self.input_resolution
# norm1
flops += self.dim * H * W
# W-MSA/SW-MSA
nW = H * W / self.window_size / self.window_size
flops += nW * self.attn.flops(self.window_size * self.window_size)
# mlp
flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio
# norm2
flops += self.dim * H * W
return flops
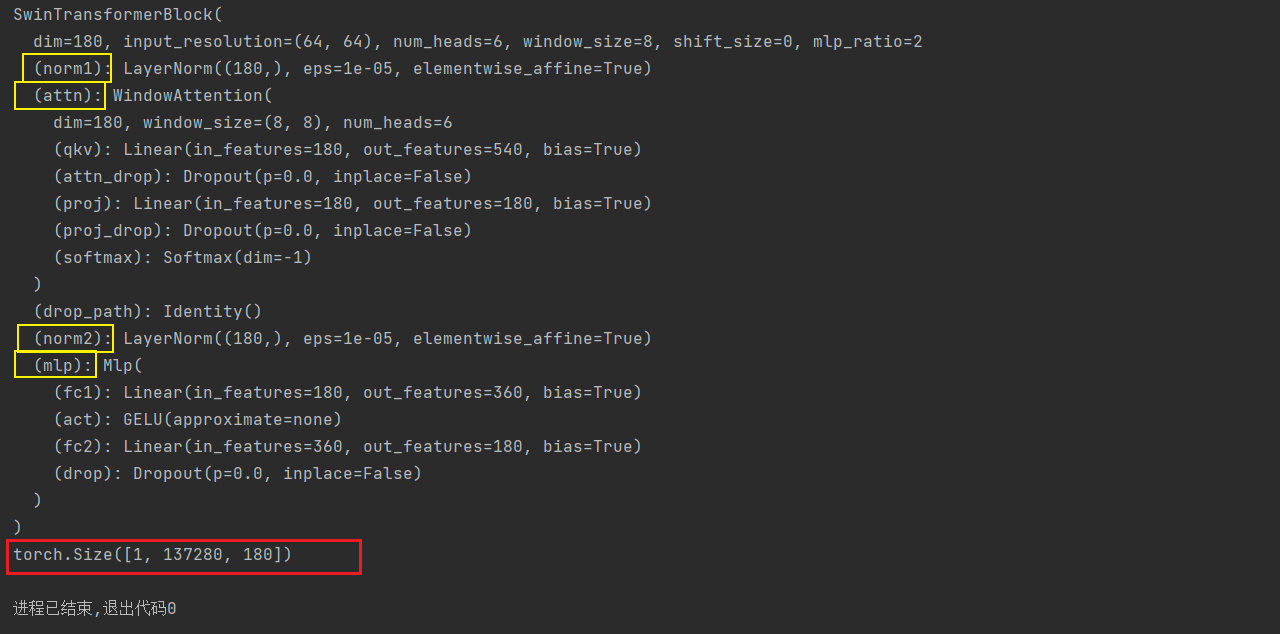
if __name__ == '__main__':
STL = SwinTransformerBlock(dim=180, input_resolution=(64, 64),
num_heads=6, window_size=8,
shift_size=0,
mlp_ratio=2,
qkv_bias=True, qk_scale=None,
drop=0., attn_drop=0.,
drop_path=0.,
norm_layer=nn.LayerNorm)
print(STL)
x = torch.randn(1, 137280, 180)
x_size = [264, 520]
out_BasicLayer = STL(x, x_size)
print(out_BasicLayer.shape)
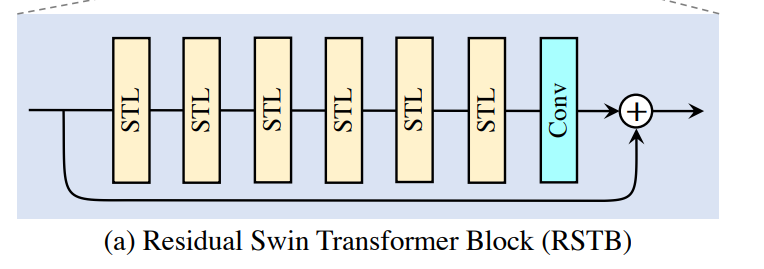
3. RSTB(Residual Swin Transformer Block)
class BasicLayer(nn.Module):
""" A basic Swin Transformer layer for one stage. STL
Args:
dim (int): Number of input channels.
input_resolution (tuple[int]): Input resolution.
depth (int): Number of blocks.
num_heads (int): Number of attention heads.
window_size (int): Local window size.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.
drop (float, optional): Dropout rate. Default: 0.0
attn_drop (float, optional): Attention dropout rate. Default: 0.0
drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
downsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: None
use_checkpoint (bool): Whether to use checkpointing to save memory. Default: False.
"""
def __init__(self, dim, input_resolution, depth, num_heads, window_size,
mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0.,
drop_path=0., norm_layer=nn.LayerNorm, downsample=None, use_checkpoint=False):
super().__init__()
self.dim = dim # 180
self.input_resolution = input_resolution # [64, 64]
self.depth = depth # 6
self.use_checkpoint = use_checkpoint
# build blocks 每个STL存储6个STB
self.blocks = nn.ModuleList([
SwinTransformerBlock(dim=dim, input_resolution=input_resolution,
num_heads=num_heads, window_size=window_size,
shift_size=0 if (i % 2 == 0) else window_size // 2,
mlp_ratio=mlp_ratio,
qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop, attn_drop=attn_drop,
drop_path=drop_path[i] if isinstance(drop_path, list) else drop_path,
norm_layer=norm_layer)
for i in range(depth)])
# patch merging layer
if downsample is not None:
self.downsample = downsample(input_resolution, dim=dim, norm_layer=norm_layer)
else:
self.downsample = None
def forward(self, x, x_size):
for blk in self.blocks:
if self.use_checkpoint:
x = checkpoint.checkpoint(blk, x, x_size)
else:
x = blk(x, x_size)
if self.downsample is not None:
x = self.downsample(x)
return x
def extra_repr(self) -> str:
return f"dim={self.dim}, input_resolution={self.input_resolution}, depth={self.depth}"
def flops(self):
flops = 0
for blk in self.blocks:
flops += blk.flops()
if self.downsample is not None:
flops += self.downsample.flops()
return flops
class RSTB(nn.Module):
"""Residual Swin Transformer Block (RSTB).
Args:
dim (int): Number of input channels.
input_resolution (tuple[int]): Input resolution.
depth (int): Number of blocks.
num_heads (int): Number of attention heads.
window_size (int): Local window size.
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.
qkv_bias (bool, optional): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float | None, optional): Override default qk scale of head_dim ** -0.5 if set.
drop (float, optional): Dropout rate. Default: 0.0
attn_drop (float, optional): Attention dropout rate. Default: 0.0
drop_path (float | tuple[float], optional): Stochastic depth rate. Default: 0.0
norm_layer (nn.Module, optional): Normalization layer. Default: nn.LayerNorm
downsample (nn.Module | None, optional): Downsample layer at the end of the layer. Default: None
use_checkpoint (bool): Whether to use checkpointing to save memory. Default: False.
img_size: Input image size.
patch_size: Patch size.
resi_connection: The convolutional block before residual connection.
"""
def __init__(self, dim, input_resolution, depth, num_heads, window_size,
mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0.,
drop_path=0., norm_layer=nn.LayerNorm, downsample=None, use_checkpoint=False,
img_size=224, patch_size=4, resi_connection='1conv'):
super(RSTB, self).__init__()
self.dim = dim # 180
self.input_resolution = input_resolution # [64, 64]
# STL
self.residual_group = BasicLayer(dim=dim,
input_resolution=input_resolution,
depth=depth,
num_heads=num_heads,
window_size=window_size,
mlp_ratio=mlp_ratio,
qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop, attn_drop=attn_drop,
drop_path=drop_path,
norm_layer=norm_layer,
downsample=downsample,
use_checkpoint=use_checkpoint)
if resi_connection == '1conv':
self.conv = nn.Conv2d(dim, dim, 3, 1, 1)
elif resi_connection == '3conv':
# to save parameters and memory
self.conv = nn.Sequential(nn.Conv2d(dim, dim // 4, 3, 1, 1), nn.LeakyReLU(negative_slope=0.2, inplace=True),
nn.Conv2d(dim // 4, dim // 4, 1, 1, 0),
nn.LeakyReLU(negative_slope=0.2, inplace=True),
nn.Conv2d(dim // 4, dim, 3, 1, 1))
self.patch_embed = PatchEmbed(
img_size=img_size, patch_size=patch_size, in_chans=0, embed_dim=dim,
norm_layer=None)
self.patch_unembed = PatchUnEmbed(
img_size=img_size, patch_size=patch_size, in_chans=0, embed_dim=dim,
norm_layer=None)
def forward(self, x, x_size):
return self.patch_embed(self.conv(self.patch_unembed(self.residual_group(x, x_size), x_size))) + x
def flops(self):
flops = 0
flops += self.residual_group.flops()
H, W = self.input_resolution
flops += H * W * self.dim * self.dim * 9
flops += self.patch_embed.flops()
flops += self.patch_unembed.flops()
return flops
class PatchEmbed(nn.Module):
r""" Image to Patch Embedding
Args:
img_size (int): Image size. Default: 224.
patch_size (int): Patch token size. Default: 4.
in_chans (int): Number of input image channels. Default: 3.
embed_dim (int): Number of linear projection output channels. Default: 96.
norm_layer (nn.Module, optional): Normalization layer. Default: None
"""
def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None):
super().__init__()
# to_2tuple(): 将输入对象转换为长度为2的元组
img_size = to_2tuple(img_size) # 64 ---> (64, 64)
patch_size = to_2tuple(patch_size) # 1 ---> (1, 1)
patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]] # [64//1,64//1] ---> [64, 64]
self.img_size = img_size # [64, 64]
self.patch_size = patch_size # [1, 1]
self.patches_resolution = patches_resolution # [64, 64]
self.num_patches = patches_resolution[0] * patches_resolution[1] # 64*64=4096
self.in_chans = in_chans # 180
self.embed_dim = embed_dim # 180
if norm_layer is not None:
self.norm = norm_layer(embed_dim)
else:
self.norm = None
def forward(self, x):
x = x.flatten(2).transpose(1, 2) # B Ph*Pw C [b, c, h, w] ---> [b, h*w, c]
if self.norm is not None:
x = self.norm(x)
return x
def flops(self):
flops = 0
H, W = self.img_size
if self.norm is not None:
flops += H * W * self.embed_dim
return flops
class PatchUnEmbed(nn.Module):
r""" Image to Patch Unembedding
Args:
img_size (int): Image size. Default: 224.
patch_size (int): Patch token size. Default: 4.
in_chans (int): Number of input image channels. Default: 3.
embed_dim (int): Number of linear projection output channels. Default: 96.
norm_layer (nn.Module, optional): Normalization layer. Default: None
"""
def __init__(self, img_size=224, patch_size=4, in_chans=3, embed_dim=96, norm_layer=None):
super().__init__()
img_size = to_2tuple(img_size)
patch_size = to_2tuple(patch_size)
patches_resolution = [img_size[0] // patch_size[0], img_size[1] // patch_size[1]]
self.img_size = img_size
self.patch_size = patch_size
self.patches_resolution = patches_resolution
self.num_patches = patches_resolution[0] * patches_resolution[1]
self.in_chans = in_chans
self.embed_dim = embed_dim
def forward(self, x, x_size):
B, HW, C = x.shape
x = x.transpose(1, 2).view(B, self.embed_dim, x_size[0], x_size[1]) # B Ph*Pw C
return x
def flops(self):
flops = 0
return flops
if __name__ == '__main__':
RSTB = RSTB(dim=180,
input_resolution=(64, 64),
depth=6,
num_heads=6,
window_size=8,
mlp_ratio=2,
qkv_bias=True, qk_scale=None,
drop=0., attn_drop=0.,
drop_path=[0.0, 0.0028571428265422583, 0.0057142856530845165, 0.008571428246796131,
0.011428571306169033, 0.014285714365541935], # no impact on SR results
norm_layer=nn.LayerNorm,
downsample=None,
use_checkpoint=False,
img_size=64,
patch_size=1,
resi_connection='1conv'
)
print(RSTB)
x = torch.randn(1, 137280, 180)
x_size = [264, 520]
out_RSTB =RSTB(x, x_size)
print(out_RSTB.shape)

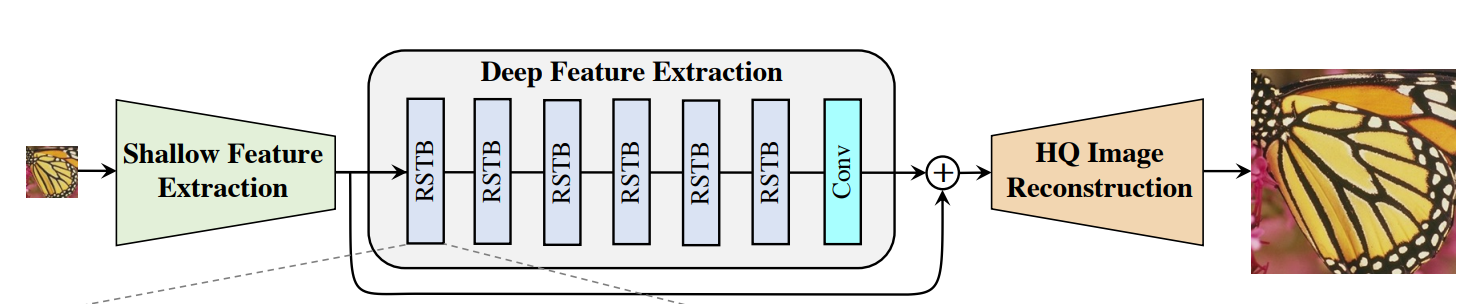
4. SwinIR(主框架网络)
class SwinIR(nn.Module):
r""" SwinIR
A PyTorch impl of : `SwinIR: Image Restoration Using Swin Transformer`, based on Swin Transformer.
Args:
img_size (int | tuple(int)): Input image size. Default 64
patch_size (int | tuple(int)): Patch size. Default: 1
in_chans (int): Number of input image channels. Default: 3
embed_dim (int): Patch embedding dimension. Default: 96
depths (tuple(int)): Depth of each Swin Transformer layer. (每个STL的深度)
num_heads (tuple(int)): Number of attention heads in different layers.
window_size (int): Window size. Default: 7
mlp_ratio (float): Ratio of mlp hidden dim to embedding dim.Default: 4 (mlp隐藏层维度与嵌入层维度的比率)
qkv_bias (bool): If True, add a learnable bias to query, key, value. Default: True
qk_scale (float): Override default qk scale of head_dim ** -0.5 if set. Default: None
drop_rate (float): Dropout rate. Default: 0
attn_drop_rate (float): Attention dropout rate. Default: 0
drop_path_rate (float): Stochastic depth rate. Default: 0.1
norm_layer (nn.Module): Normalization layer. Default: nn.LayerNorm.
ape (bool): If True, add absolute position embedding to the patch embedding. Default: False (是否使用绝对位置嵌入)
patch_norm (bool): If True, add normalization after patch embedding. Default: True
use_checkpoint (bool): Whether to use checkpointing to save memory. Default: False
upscale: Upscale factor. 2/3/4/8 for image SR, 1 for denoising and compress artifact reduction
img_range: Image range. 1. or 255. (输入图像像素值范围:1或者255)
upsampler: The reconstruction reconstruction module. 'pixelshuffle'/'pixelshuffledirect'/'nearest+conv'/None
resi_connection: The convolutional block before residual connection. '1conv'/'3conv'
# real sr
model = net(upscale=args.scale, in_chans=3, img_size=64, window_size=8,
img_range=1., depths=[6, 6, 6, 6, 6, 6], embed_dim=180, num_heads=[6, 6, 6, 6, 6, 6],
mlp_ratio=2, upsampler='nearest+conv', resi_connection='1conv')
"""
def __init__(self, img_size=64, patch_size=1, in_chans=3,
embed_dim=96, depths=[6, 6, 6, 6], num_heads=[6, 6, 6, 6],
window_size=7, mlp_ratio=4., qkv_bias=True, qk_scale=None,
drop_rate=0., attn_drop_rate=0., drop_path_rate=0.1,
norm_layer=nn.LayerNorm, ape=False, patch_norm=True,
use_checkpoint=False, upscale=2, img_range=1., upsampler='', resi_connection='1conv',
**kwargs):
super(SwinIR, self).__init__()
num_in_ch = in_chans # 3
num_out_ch = in_chans # 3
num_feat = 64
self.img_range = img_range
# 对图像进行归一化处理
if in_chans == 3:
rgb_mean = (0.4488, 0.4371, 0.4040)
self.mean = torch.Tensor(rgb_mean).view(1, 3, 1, 1) # mean[1, 3, 1, 1]
else:
self.mean = torch.zeros(1, 1, 1, 1)
self.upscale = upscale # 4
self.upsampler = upsampler # nearest+conv
self.window_size = window_size # 8
#####################################################################################################
################################### 1, shallow feature extraction ###################################
self.conv_first = nn.Conv2d(num_in_ch, embed_dim, 3, 1, 1) # 3 ---> 96
#####################################################################################################
################################### 2, deep feature extraction ######################################
self.num_layers = len(depths) # 6, 默认4
self.embed_dim = embed_dim # 180, 默认96
self.ape = ape # 默认false
self.patch_norm = patch_norm # 默认true
self.num_features = embed_dim # 180, 默认96
self.mlp_ratio = mlp_ratio # 2, 默认4
# split image into non-overlapping patches (把图像分割成patches)
self.patch_embed = PatchEmbed(
img_size=img_size, patch_size=patch_size, in_chans=embed_dim, embed_dim=embed_dim,
norm_layer=norm_layer if self.patch_norm else None)
num_patches = self.patch_embed.num_patches # 64*64=4096, 默认264*184= 48576
patches_resolution = self.patch_embed.patches_resolution # [64, 64]
self.patches_resolution = patches_resolution # [64, 64]
# merge non-overlapping patches into image (把多个patches在合成一张图像)
self.patch_unembed = PatchUnEmbed(
img_size=img_size, patch_size=patch_size, in_chans=embed_dim, embed_dim=embed_dim,
norm_layer=norm_layer if self.patch_norm else None)
# absolute position embedding # 使用绝对位置嵌入
if self.ape:
self.absolute_pos_embed = nn.Parameter(torch.zeros(1, num_patches, embed_dim))
trunc_normal_(self.absolute_pos_embed, std=.02)
self.pos_drop = nn.Dropout(p=drop_rate)
# stochastic depth 随机深度: 从 0 到 drop_path_rate 之间均匀分布的数字序列。
# torch.linspace(0, 0.1, sum([6, 6, 6, 6, 6, 6])): 生成从0开始到0.1结束的等差数列(公差大约是0.002857),总共有36个元素
dpr = [x.item() for x in torch.linspace(0, drop_path_rate, sum(depths))] # stochastic depth decay rule
# build Residual Swin Transformer blocks (RSTB)
self.layers = nn.ModuleList()
for i_layer in range(self.num_layers):
layer = RSTB(dim=embed_dim,
input_resolution=(patches_resolution[0],
patches_resolution[1]),
depth=depths[i_layer],
num_heads=num_heads[i_layer],
window_size=window_size,
mlp_ratio=self.mlp_ratio,
qkv_bias=qkv_bias, qk_scale=qk_scale,
drop=drop_rate, attn_drop=attn_drop_rate,
drop_path=dpr[sum(depths[:i_layer]):sum(depths[:i_layer + 1])], # no impact on SR results
norm_layer=norm_layer,
downsample=None,
use_checkpoint=use_checkpoint,
img_size=img_size,
patch_size=patch_size,
resi_connection=resi_connection
)
self.layers.append(layer)
self.norm = norm_layer(self.num_features)
# build the last conv layer in deep feature extraction
if resi_connection == '1conv':
self.conv_after_body = nn.Conv2d(embed_dim, embed_dim, 3, 1, 1)
elif resi_connection == '3conv':
# to save parameters and memory
self.conv_after_body = nn.Sequential(nn.Conv2d(embed_dim, embed_dim // 4, 3, 1, 1),
nn.LeakyReLU(negative_slope=0.2, inplace=True),
nn.Conv2d(embed_dim // 4, embed_dim // 4, 1, 1, 0),
nn.LeakyReLU(negative_slope=0.2, inplace=True),
nn.Conv2d(embed_dim // 4, embed_dim, 3, 1, 1))
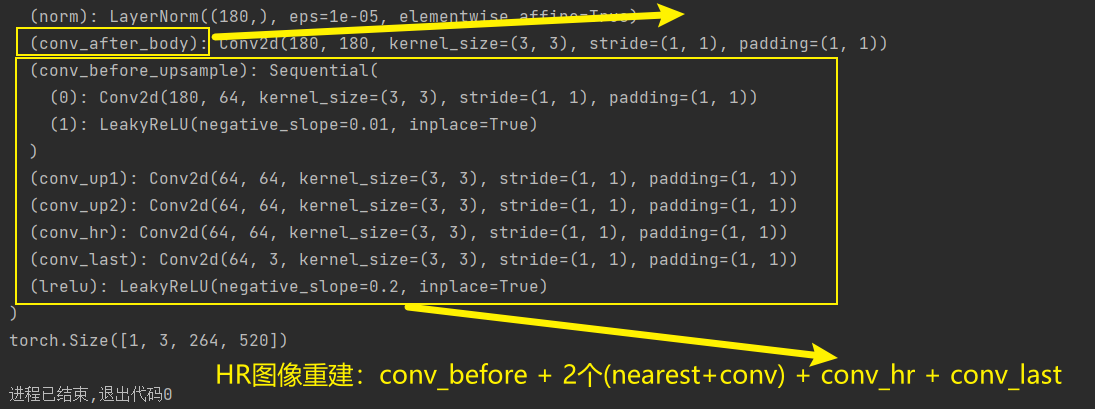
#####################################################################################################
################################ 3, high quality image reconstruction ################################
if self.upsampler == 'pixelshuffle':
# for classical SR
self.conv_before_upsample = nn.Sequential(nn.Conv2d(embed_dim, num_feat, 3, 1, 1),
nn.LeakyReLU(inplace=True))
self.upsample = Upsample(upscale, num_feat)
self.conv_last = nn.Conv2d(num_feat, num_out_ch, 3, 1, 1)
elif self.upsampler == 'pixelshuffledirect':
# for lightweight SR (to save parameters)
self.upsample = UpsampleOneStep(upscale, embed_dim, num_out_ch,
(patches_resolution[0], patches_resolution[1]))
elif self.upsampler == 'nearest+conv':
# for real-world SR (less artifacts)
self.conv_before_upsample = nn.Sequential(nn.Conv2d(embed_dim, num_feat, 3, 1, 1),
nn.LeakyReLU(inplace=True))
self.conv_up1 = nn.Conv2d(num_feat, num_feat, 3, 1, 1)
if self.upscale == 4:
self.conv_up2 = nn.Conv2d(num_feat, num_feat, 3, 1, 1)
self.conv_hr = nn.Conv2d(num_feat, num_feat, 3, 1, 1)
self.conv_last = nn.Conv2d(num_feat, num_out_ch, 3, 1, 1)
self.lrelu = nn.LeakyReLU(negative_slope=0.2, inplace=True)
else:
# for image denoising and JPEG compression artifact reduction
self.conv_last = nn.Conv2d(embed_dim, num_out_ch, 3, 1, 1)
self.apply(self._init_weights)
def _init_weights(self, m):
if isinstance(m, nn.Linear): # 对于线性层,权重使用截断正态分布初始化,
trunc_normal_(m.weight, std=.02)
if isinstance(m, nn.Linear) and m.bias is not None: # 对于含有偏置的线性层,将偏置项 m.bias 初始化为零。
nn.init.constant_(m.bias, 0)
elif isinstance(m, nn.LayerNorm): # 对于layerNorm,将权重初始化为1,偏置初始化为0
nn.init.constant_(m.bias, 0)
nn.init.constant_(m.weight, 1.0)
@torch.jit.ignore
def no_weight_decay(self):
return {'absolute_pos_embed'}
@torch.jit.ignore
def no_weight_decay_keywords(self):
return {'relative_position_bias_table'}
def check_image_size(self, x):
_, _, h, w = x.size()
mod_pad_h = (self.window_size - h % self.window_size) % self.window_size
mod_pad_w = (self.window_size - w % self.window_size) % self.window_size
x = F.pad(x, (0, mod_pad_w, 0, mod_pad_h), 'reflect')
return x
def forward_features(self, x):
x_size = (x.shape[2], x.shape[3])
x = self.patch_embed(x)
if self.ape:
x = x + self.absolute_pos_embed
x = self.pos_drop(x)
for layer in self.layers:
x = layer(x, x_size)
x = self.norm(x) # B L C
x = self.patch_unembed(x, x_size)
return x
def forward(self, x):
H, W = x.shape[2:]
x = self.check_image_size(x)
self.mean = self.mean.type_as(x)
x = (x - self.mean) * self.img_range
if self.upsampler == 'pixelshuffle':
# for classical SR
x = self.conv_first(x)
x = self.conv_after_body(self.forward_features(x)) + x
x = self.conv_before_upsample(x)
x = self.conv_last(self.upsample(x))
elif self.upsampler == 'pixelshuffledirect':
# for lightweight SR
x = self.conv_first(x)
x = self.conv_after_body(self.forward_features(x)) + x
x = self.upsample(x)
elif self.upsampler == 'nearest+conv':
# for real-world SR
x = self.conv_first(x)
x = self.conv_after_body(self.forward_features(x)) + x
x = self.conv_before_upsample(x)
x = self.lrelu(self.conv_up1(torch.nn.functional.interpolate(x, scale_factor=2, mode='nearest')))
if self.upscale == 4:
x = self.lrelu(self.conv_up2(torch.nn.functional.interpolate(x, scale_factor=2, mode='nearest')))
x = self.conv_last(self.lrelu(self.conv_hr(x)))
else:
# for image denoising and JPEG compression artifact reduction
x_first = self.conv_first(x)
res = self.conv_after_body(self.forward_features(x_first)) + x_first
x = x + self.conv_last(res)
x = x / self.img_range + self.mean
return x[:, :, :H * self.upscale, :W * self.upscale]
def flops(self):
flops = 0
H, W = self.patches_resolution
flops += H * W * 3 * self.embed_dim * 9
flops += self.patch_embed.flops()
for i, layer in enumerate(self.layers):
flops += layer.flops()
flops += H * W * 3 * self.embed_dim * self.embed_dim
flops += self.upsample.flops()
return flops
if __name__ == '__main__':
SwinIR = SwinIR(upscale=4, in_chans=3, img_size=64, window_size=8,
img_range=1., depths=[6, 6, 6, 6, 6, 6], embed_dim=180, num_heads=[6, 6, 6, 6, 6, 6],
mlp_ratio=2, upsampler='nearest+conv', resi_connection='1conv')
print(SwinIR)
x = torch.randn(1, 3, 264, 520)
out_SwinIR = SwinIR(x)
print(x.shape)

二、解读SwinIR测试主文件:main_test_swinir.py
import argparse
import cv2
import glob
import numpy as np
from collections import OrderedDict
import os
import torch
import requests
from models.network_swinir import SwinIR as net
from utils import util_calculate_psnr_ssim as util
# 测试:python main_test_swinir.py --task real_sr --scale 4 --model_path model_zoo/swinir/003_realSR_BSRGAN_DFO_s64w8_SwinIR-M_x4_GAN.pth --folder_lq testsets/RealSRSet+5images --tile
def main():
parser = argparse.ArgumentParser()
# IR中的三种任务
parser.add_argument('--task', type=str, default='real_sr', help='classical_sr, lightweight_sr, real_sr, '
'gray_dn, color_dn, jpeg_car, color_jpeg_car')
# 缩放尺寸
parser.add_argument('--scale', type=int, default=4, help='scale factor: 1, 2, 3, 4, 8') # 1 for dn and jpeg car
# 添加噪声的程度
parser.add_argument('--noise', type=int, default=15, help='noise level: 15, 25, 50')
# jpeg压缩程度
parser.add_argument('--jpeg', type=int, default=40, help='scale factor: 10, 20, 30, 40')
# 训练的patch尺寸
parser.add_argument('--training_patch_size', type=int, default=128, help='patch size used in training SwinIR. '
'Just used to differentiate two different settings in Table 2 of the paper. '
'Images are NOT tested patch by patch.')
# 是否使用real image sr的大模型
parser.add_argument('--large_model', action='store_true', help='use large model, only provided for real image sr')
# 训练好的模型路径
parser.add_argument('--model_path', type=str,
default='model_zoo/swinir/003_realSR_BSRGAN_DFO_s64w8_SwinIR-M_x4_GAN.pth')
# 测试的LQ图像文件路径
parser.add_argument('--folder_lq', type=str, default='testsets/RealSRSet+5images', help='input low-quality test image folder')
parser.add_argument('--folder_gt', type=str, default=None, help='input ground-truth test image folder')
# 测试时,是否将图像分成多个小块进行测试。(超出显存时,使用)
parser.add_argument('--tile', type=int, default=None,
help='Tile size, None for no tile during testing (testing as a whole)')
# 不同小块的重叠区域
parser.add_argument('--tile_overlap', type=int, default=32, help='Overlapping of different tiles')
args = parser.parse_args()
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# set up model 加载训练后的SwinIR模型
if os.path.exists(args.model_path):
print(f'loading model from {args.model_path}')
else:
os.makedirs(os.path.dirname(args.model_path), exist_ok=True)
url = 'https://github.com/JingyunLiang/SwinIR/releases/download/v0.0/{}'.format(
os.path.basename(args.model_path))
r = requests.get(url, allow_redirects=True)
print(f'downloading model {args.model_path}')
open(args.model_path, 'wb').write(r.content)
model = define_model(args) # 根据model.task的选择,设置不同的网络模型
model.eval()
model = model.to(device)
# setup folder: 测试LQ图像的文件路径, save_dir: 保存的HQ文件路径, border: 0, window_size: 8
folder, save_dir, border, window_size = setup(args)
os.makedirs(save_dir, exist_ok=True)
test_results = OrderedDict() # 按照有序插入顺序存储 的有序字典
test_results['psnr'] = []
test_results['ssim'] = []
test_results['psnr_y'] = []
test_results['ssim_y'] = []
test_results['psnrb'] = []
test_results['psnrb_y'] = []
psnr, ssim, psnr_y, ssim_y, psnrb, psnrb_y = 0, 0, 0, 0, 0, 0
# 整个循环会依次处理文件夹 folder 中的每个文件,并对其进行排序。在每次迭代中,idx: 文件在列表中的索引,path: 文件的完整路径。
# glob.glob(): 函数用于获取匹配指定模式的文件路径列表
# os.path.join(folder, '*'): 会生成一个匹配指定文件夹下所有文件的模式
for idx, path in enumerate(sorted(glob.glob(os.path.join(folder, '*')))):
# read image 获取图像的名字,获取图像[h, w, c],(float32,0-1之间)
imgname, img_lq, img_gt = get_image_pair(args, path) # image to HWC-BGR, float32
# 先把使用CV2获取的图像颜色通道BGR转换成RGB,然后在将图像[h, w, c] ---> [c, h, w]
img_lq = np.transpose(img_lq if img_lq.shape[2] == 1 else img_lq[:, :, [2, 1, 0]],
(2, 0, 1)) # HCW-BGR to CHW-RGB
# ndarry[c, h, w] ---> tensor[1, c, h, w]
img_lq = torch.from_numpy(img_lq).float().unsqueeze(0).to(device) # CHW-RGB to NCHW-RGB
# inference
with torch.no_grad():
# pad input image to be a multiple of window_size 将输入图像填充至window_size的倍数
_, _, h_old, w_old = img_lq.size() # h_old:256 w_old:512
h_pad = (h_old // window_size + 1) * window_size - h_old # 需要填充的高度:8
w_pad = (w_old // window_size + 1) * window_size - w_old # 需要填充的宽度:8
# torch.flip(img_lq, [dim]):对输入的 img_lq 图像进行第dim维度(水平/垂直)方向上的镜像翻转。
img_lq = torch.cat([img_lq, torch.flip(img_lq, [2])], 2)[:, :, :h_old + h_pad, :] # 水平镜像填充高度 [1, 3, 256+8, 512] = [1, 3, 264, 512]
img_lq = torch.cat([img_lq, torch.flip(img_lq, [3])], 3)[:, :, :, :w_old + w_pad] # 垂直镜像填充宽度 [1, 3, 256+8, 512+8] = [1, 3, 264, 520]
# 前向传播,得到4倍放大的HR图像
output = test(img_lq, model, args, window_size) # [1, 3, 264, 520] --> [1, 3, 264*4, 520*4] = [1, 3, 1056, 2080]
# 在将填充图像剪裁为原始图像的四倍。
output = output[..., :h_old * args.scale, :w_old * args.scale] # 在将图像恢复成原始图像的4倍 [1, 3, 1024, 2048]
# save image将重建的HR图像[1, 3, 1024, 2048] ---> [3, 1024, 2048], 并将元素值限制在(0,1), 且转为ndarry
# x.clamp_(0, 1): 将x的元素值限制到(0, 1)(<0的用0代替,>1的用1代替)
output = output.data.squeeze().float().cpu().clamp_(0, 1).numpy() # [3, 1024, 2048]
if output.ndim == 3:
# 先将通道维度RGB---> BGR, 然后在将CHW ---> HWC
output = np.transpose(output[[2, 1, 0], :, :], (1, 2, 0)) # CHW-RGB to HCW-BGR
# 再将元素值由(0,1)的float32---> (0, 255)的uint8
output = (output * 255.0).round().astype(np.uint8) # float32 to uint8
# 最后使用CV2库保存生成图像
cv2.imwrite(f'{save_dir}/{imgname}_SwinIR.png', output)
# evaluate psnr/ssim/psnr_b (对于由GT图像的测试任务,则计算其相应的指标)
if img_gt is not None:
img_gt = (img_gt * 255.0).round().astype(np.uint8) # float32 to uint8
img_gt = img_gt[:h_old * args.scale, :w_old * args.scale, ...] # crop gt
img_gt = np.squeeze(img_gt)
psnr = util.calculate_psnr(output, img_gt, crop_border=border)
ssim = util.calculate_ssim(output, img_gt, crop_border=border)
test_results['psnr'].append(psnr)
test_results['ssim'].append(ssim)
if img_gt.ndim == 3: # RGB image
psnr_y = util.calculate_psnr(output, img_gt, crop_border=border, test_y_channel=True)
ssim_y = util.calculate_ssim(output, img_gt, crop_border=border, test_y_channel=True)
test_results['psnr_y'].append(psnr_y)
test_results['ssim_y'].append(ssim_y)
if args.task in ['jpeg_car', 'color_jpeg_car']:
psnrb = util.calculate_psnrb(output, img_gt, crop_border=border, test_y_channel=False)
test_results['psnrb'].append(psnrb)
if args.task in ['color_jpeg_car']:
psnrb_y = util.calculate_psnrb(output, img_gt, crop_border=border, test_y_channel=True)
test_results['psnrb_y'].append(psnrb_y)
print('Testing {:d} {:20s} - PSNR: {:.2f} dB; SSIM: {:.4f}; PSNRB: {:.2f} dB;'
'PSNR_Y: {:.2f} dB; SSIM_Y: {:.4f}; PSNRB_Y: {:.2f} dB.'.
format(idx, imgname, psnr, ssim, psnrb, psnr_y, ssim_y, psnrb_y))
else:
print('Testing {:d} {:20s}'.format(idx, imgname))
# summarize psnr/ssim
if img_gt is not None:
ave_psnr = sum(test_results['psnr']) / len(test_results['psnr'])
ave_ssim = sum(test_results['ssim']) / len(test_results['ssim'])
print('\n{} \n-- Average PSNR/SSIM(RGB): {:.2f} dB; {:.4f}'.format(save_dir, ave_psnr, ave_ssim))
if img_gt.ndim == 3:
ave_psnr_y = sum(test_results['psnr_y']) / len(test_results['psnr_y'])
ave_ssim_y = sum(test_results['ssim_y']) / len(test_results['ssim_y'])
print('-- Average PSNR_Y/SSIM_Y: {:.2f} dB; {:.4f}'.format(ave_psnr_y, ave_ssim_y))
if args.task in ['jpeg_car', 'color_jpeg_car']:
ave_psnrb = sum(test_results['psnrb']) / len(test_results['psnrb'])
print('-- Average PSNRB: {:.2f} dB'.format(ave_psnrb))
if args.task in ['color_jpeg_car']:
ave_psnrb_y = sum(test_results['psnrb_y']) / len(test_results['psnrb_y'])
print('-- Average PSNRB_Y: {:.2f} dB'.format(ave_psnrb_y))
def define_model(args):
# 001 classical image sr
if args.task == 'classical_sr':
model = net(upscale=args.scale, in_chans=3, img_size=args.training_patch_size, window_size=8,
img_range=1., depths=[6, 6, 6, 6, 6, 6], embed_dim=180, num_heads=[6, 6, 6, 6, 6, 6],
mlp_ratio=2, upsampler='pixelshuffle', resi_connection='1conv')
param_key_g = 'params'
# 002 lightweight image sr
# use 'pixelshuffledirect' to save parameters
elif args.task == 'lightweight_sr':
model = net(upscale=args.scale, in_chans=3, img_size=64, window_size=8,
img_range=1., depths=[6, 6, 6, 6], embed_dim=60, num_heads=[6, 6, 6, 6],
mlp_ratio=2, upsampler='pixelshuffledirect', resi_connection='1conv')
param_key_g = 'params'
# 003 real-world image sr
elif args.task == 'real_sr':
if not args.large_model:
# use 'nearest+conv' to avoid block artifacts
model = net(upscale=args.scale, in_chans=3, img_size=64, window_size=8,
img_range=1., depths=[6, 6, 6, 6, 6, 6], embed_dim=180, num_heads=[6, 6, 6, 6, 6, 6],
mlp_ratio=2, upsampler='nearest+conv', resi_connection='1conv')
else:
# larger model size; use '3conv' to save parameters and memory; use ema for GAN training
model = net(upscale=args.scale, in_chans=3, img_size=64, window_size=8,
img_range=1., depths=[6, 6, 6, 6, 6, 6, 6, 6, 6], embed_dim=240,
num_heads=[8, 8, 8, 8, 8, 8, 8, 8, 8],
mlp_ratio=2, upsampler='nearest+conv', resi_connection='3conv')
param_key_g = 'params_ema'
# 004 grayscale image denoising
elif args.task == 'gray_dn':
model = net(upscale=1, in_chans=1, img_size=128, window_size=8,
img_range=1., depths=[6, 6, 6, 6, 6, 6], embed_dim=180, num_heads=[6, 6, 6, 6, 6, 6],
mlp_ratio=2, upsampler='', resi_connection='1conv')
param_key_g = 'params'
# 005 color image denoising
elif args.task == 'color_dn':
model = net(upscale=1, in_chans=3, img_size=128, window_size=8,
img_range=1., depths=[6, 6, 6, 6, 6, 6], embed_dim=180, num_heads=[6, 6, 6, 6, 6, 6],
mlp_ratio=2, upsampler='', resi_connection='1conv')
param_key_g = 'params'
# 006 grayscale JPEG compression artifact reduction
# use window_size=7 because JPEG encoding uses 8x8; use img_range=255 because it's sligtly better than 1
elif args.task == 'jpeg_car':
model = net(upscale=1, in_chans=1, img_size=126, window_size=7,
img_range=255., depths=[6, 6, 6, 6, 6, 6], embed_dim=180, num_heads=[6, 6, 6, 6, 6, 6],
mlp_ratio=2, upsampler='', resi_connection='1conv')
param_key_g = 'params'
# 006 color JPEG compression artifact reduction
# use window_size=7 because JPEG encoding uses 8x8; use img_range=255 because it's sligtly better than 1
elif args.task == 'color_jpeg_car':
model = net(upscale=1, in_chans=3, img_size=126, window_size=7,
img_range=255., depths=[6, 6, 6, 6, 6, 6], embed_dim=180, num_heads=[6, 6, 6, 6, 6, 6],
mlp_ratio=2, upsampler='', resi_connection='1conv')
param_key_g = 'params'
pretrained_model = torch.load(args.model_path)
model.load_state_dict(pretrained_model[param_key_g] if param_key_g in pretrained_model.keys() else pretrained_model,
strict=True)
return model
def setup(args):
# 001 classical image sr/ 002 lightweight image sr
if args.task in ['classical_sr', 'lightweight_sr']:
save_dir = f'results/swinir_{args.task}_x{args.scale}'
folder = args.folder_gt
border = args.scale
window_size = 8
# 003 real-world image sr
elif args.task in ['real_sr']:
save_dir = f'results/swinir_{args.task}_x{args.scale}'
if args.large_model:
save_dir += '_large'
folder = args.folder_lq
border = 0
window_size = 8
# 004 grayscale image denoising/ 005 color image denoising
elif args.task in ['gray_dn', 'color_dn']:
save_dir = f'results/swinir_{args.task}_noise{args.noise}'
folder = args.folder_gt
border = 0
window_size = 8
# 006 JPEG compression artifact reduction
elif args.task in ['jpeg_car', 'color_jpeg_car']:
save_dir = f'results/swinir_{args.task}_jpeg{args.jpeg}'
folder = args.folder_gt
border = 0
window_size = 7
return folder, save_dir, border, window_size
def get_image_pair(args, path):
# 用于将文件路径 path 中的文件名和扩展名分离,并将它们分别赋值给 imgname 和 imgext 变量
(imgname, imgext) = os.path.splitext(os.path.basename(path))
# 001 classical image sr/ 002 lightweight image sr (load lq-gt image pairs)
if args.task in ['classical_sr', 'lightweight_sr']:
img_gt = cv2.imread(path, cv2.IMREAD_COLOR).astype(np.float32) / 255.
img_lq = cv2.imread(f'{args.folder_lq}/{imgname}x{args.scale}{imgext}', cv2.IMREAD_COLOR).astype(
np.float32) / 255.
# 003 real-world image sr (load lq image only)
elif args.task in ['real_sr']:
img_gt = None
# 读取路径为 path 的图像文件,并将其转换为浮点型(float32)数组,同时进行归一化处理,范围在0到1之间
img_lq = cv2.imread(path, cv2.IMREAD_COLOR).astype(np.float32) / 255.
# 004 grayscale image denoising (load gt image and generate lq image on-the-fly)
elif args.task in ['gray_dn']:
img_gt = cv2.imread(path, cv2.IMREAD_GRAYSCALE).astype(np.float32) / 255.
np.random.seed(seed=0)
img_lq = img_gt + np.random.normal(0, args.noise / 255., img_gt.shape)
img_gt = np.expand_dims(img_gt, axis=2)
img_lq = np.expand_dims(img_lq, axis=2)
# 005 color image denoising (load gt image and generate lq image on-the-fly)
elif args.task in ['color_dn']:
img_gt = cv2.imread(path, cv2.IMREAD_COLOR).astype(np.float32) / 255.
np.random.seed(seed=0)
img_lq = img_gt + np.random.normal(0, args.noise / 255., img_gt.shape)
# 006 grayscale JPEG compression artifact reduction (load gt image and generate lq image on-the-fly)
elif args.task in ['jpeg_car']:
img_gt = cv2.imread(path, cv2.IMREAD_UNCHANGED)
if img_gt.ndim != 2:
img_gt = util.bgr2ycbcr(img_gt, y_only=True)
result, encimg = cv2.imencode('.jpg', img_gt, [int(cv2.IMWRITE_JPEG_QUALITY), args.jpeg])
img_lq = cv2.imdecode(encimg, 0)
img_gt = np.expand_dims(img_gt, axis=2).astype(np.float32) / 255.
img_lq = np.expand_dims(img_lq, axis=2).astype(np.float32) / 255.
# 006 JPEG compression artifact reduction (load gt image and generate lq image on-the-fly)
elif args.task in ['color_jpeg_car']:
img_gt = cv2.imread(path)
result, encimg = cv2.imencode('.jpg', img_gt, [int(cv2.IMWRITE_JPEG_QUALITY), args.jpeg])
img_lq = cv2.imdecode(encimg, 1)
img_gt = img_gt.astype(np.float32) / 255.
img_lq = img_lq.astype(np.float32) / 255.
return imgname, img_lq, img_gt
def test(img_lq, model, args, window_size):
# 是否将图像分成多个小块进行测试。(超出显存时,使用)
if args.tile is None:
# test the image as a whole
output = model(img_lq)
else:
# test the image tile by tile
b, c, h, w = img_lq.size()
tile = min(args.tile, h, w)
assert tile % window_size == 0, "tile size should be a multiple of window_size"
tile_overlap = args.tile_overlap
sf = args.scale
# 计算每次滑动的步长
stride = tile - tile_overlap
# 根据步长和图像高度计算垂直方向上分块的起始索引列表。
h_idx_list = list(range(0, h - tile, stride)) + [h - tile]
# 根据步长和图像宽度计算水平方向上分块的起始索引列表。
w_idx_list = list(range(0, w - tile, stride)) + [w - tile]
# 创建一个与输入图像相同类型的全零张量 E,用于存储每个分块的测试结果。
E = torch.zeros(b, c, h * sf, w * sf).type_as(img_lq)
# 创建一个与 E 相同类型的全零张量 W,用于存储每个分块的权重信息。
W = torch.zeros_like(E)
# 循环遍历垂直和水平方向上的分块起始索引。
for h_idx in h_idx_list:
for w_idx in w_idx_list:
# 根据当前分块的起始索引,从输入图像中提取对应的分块。
in_patch = img_lq[..., h_idx:h_idx + tile, w_idx:w_idx + tile]
# 对每个块进行前向传播的超分辨率重建
out_patch = model(in_patch)
out_patch_mask = torch.ones_like(out_patch)
# 将当前分块的测试结果和权重信息添加到全局张量 E 和 W 中的相应位置。
E[..., h_idx * sf:(h_idx + tile) * sf, w_idx * sf:(w_idx + tile) * sf].add_(out_patch)
W[..., h_idx * sf:(h_idx + tile) * sf, w_idx * sf:(w_idx + tile) * sf].add_(out_patch_mask)
# 将 E 中的每个分块测试结果除以 W 中的相应权重,得到的结果为所有分块测试结果的加权平均值。
output = E.div_(W)
return output
if __name__ == '__main__':
main()
原图像


重建HR图像:

















 8649
8649











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









