







目录
普中51-单核-A2
STC89C52
MSP430G2553 Launchpad 扩展板
Keil uVision V5.29.0.0
PK51 Prof.Developers Kit Version:9.60.0.0
上位机:Vofa+ 1.3.10
摘自《Launchpad口袋实验平台(指导书)》、《AY-G2PL KIT_用户手册》
硬知识
对于低速的 IO,可以通过串行转并行的方法扩展。1 片 I2C 接口控制的 IO 扩展芯片 TCA6416A可为 单片机额外扩展出 16 个双向 IO。
扩展输出口的方法其实就是将串行数据转为并行数据输出,串入并出移位寄存器加一个锁存器就可以将串行转并行输出(也就是扩展了 IO 口),比如 74 系列通用数字逻辑器件74HC595,可以任意级联扩展输出口。
串行转并行的代价就是速度会变慢,理论上,1 串转 16 并输出,速度至少要降 16 倍。假如普通 IO 翻转电平的速度是 1MHz,转 16 并输出后,速度将降为 62.5kHz。这个速度对于很多应用已绰绰有余,比如和人有关的输入输出设备(键盘、段式 LCD/LED 驱动、点阵LCD/LED 驱动等)。
扩展输入口的方法类似,只不过使用的是并入串出的移位寄存器。
IO 扩展芯片 TCA6416A
类似 74HC595 的串并转换芯片虽然廉价,但是它只能扩展输出口,不能同时扩展出双向IO 口。而TCA6416A则是基于 I2C 控制的双向 IO 扩展芯片。
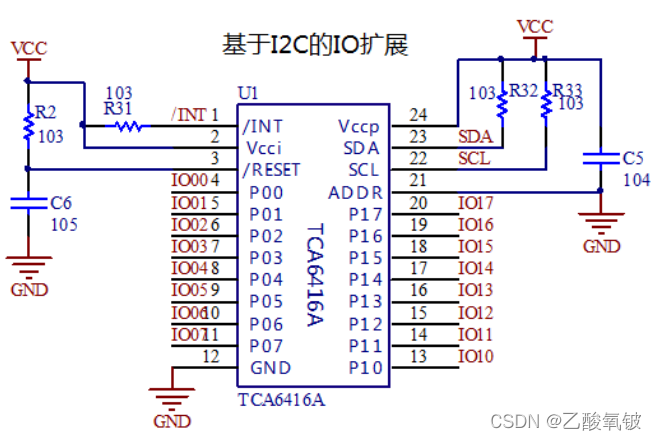
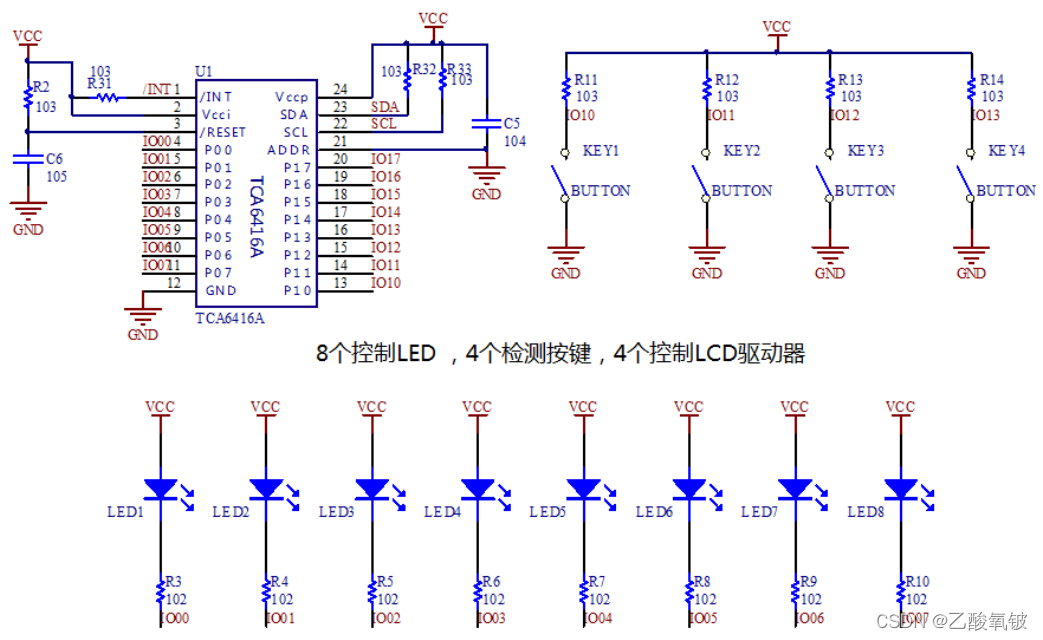
- TCA6416A 可以扩展出 16 个双向 IO 口,为了与单片机原生的 IO 区别,图中TCA6416A 扩展出的 IO 标注为 IO00-IO07,IO10-IO17。
- ADDR 引脚是 I2C 设备的地址引脚,通过接地或 VCC 可设置为两个不同的地址,换句话说,1 组 I2C 总线上可挂两片 TCA6416A(ADDR 引脚分别接地和接 VCC)。
- /INT 引脚是专门为扩展输入引脚设计的,相当于单片机的外部中断。当扩展 IO 设为输入模式,且输入电平变化时,/INT 引脚便会触发下降沿中断,单片机的 IO 再去检测/INT 的下降沿,触发真正的单片机中断。单片机通过 I2C 协议查看 TCA6416A 的相关寄存器,便知晓是哪个 IO 被按下。
- /RESET 引脚地位相当于单片机的复位引脚,为了节约单片机为数不多的 IO口,这里仿照单片机的上电复位电路用 R2 和 C6 给 TCA6416 也设计了上电复位电路。
- SDA、SCL 和/INT 引脚必须外接上拉电阻(R31/32/33)。
- 电源 VCC 和地 GND 之间接电容 C5(100nF,标柱为 104)进行去耦,起到“有病治病无病强身”的作用。
TAC6416A 的寄存器
首先我们把 TCA6416A 扩展出的 16 个普通 IO 口,理解为成单片机的 P0 和 P1 口,CPU对 IO 口的读写实际上都是通过寄存器这个中介进行的。其次,参考图 12.3 的移位寄存器原理,扩展出的 IO 也是无法位操作的,读写都必须多位同时进行。TAC6416A 的寄存器设计其实很好理解,共 4 组寄存器,我们不妨先分析一下需要哪 4 组。
- 需要 16 位的 Input Port Registers 来存储 16 个 IO 的输入状态,相当于单片机中的PxIN。
- 需要 16 位的 Output Port Registers 来存储 16 个 IO 的输入状态,相当于单片机中的PxOUT。
- 需要 16 位的 Configuration Registers 来存储 IO 的输入输出方向,相当于单片机中的PxDIR。
- 需要 16 位的 Polarity Inversion Registers 来存储是否对 IO1/0 取反操作,这个功能在单片机中没有。
CPU 对于 IO 口的操作有置 1,置 0 和取反三种,单片机可以通过先读出 IO 状态,再做异或逻辑的办法实现取反。但是在 TCA6416A 中,就必须先用 I2C 协议读 Input Port Registers ,CPU 运算后,再用 I2C 写 Output Port Registers ,这个时间非常长。所以TCA6416A 直接就集成了硬件 IO 电平翻转电路,相当于“复杂指令集”了一回。
实际的 TCA6416A 寄存器,使用 TCA6416A 的过程就是配置这几个寄存器。
IO 输入寄存器

IO 输出寄存器

IO 反相寄存器

IO 方向寄存器

TCA6416A 的操作
TCA6416A 写数据
对 TCA6416A 来说,可能要写 3 种数据,IO 输出电平寄存器,IO 方向寄存器,IO 电平极性翻转寄存器,3 个寄存器都影响实际的 IO 输出,所以这 3 者的地位是完全平等的,写的方法也一样。
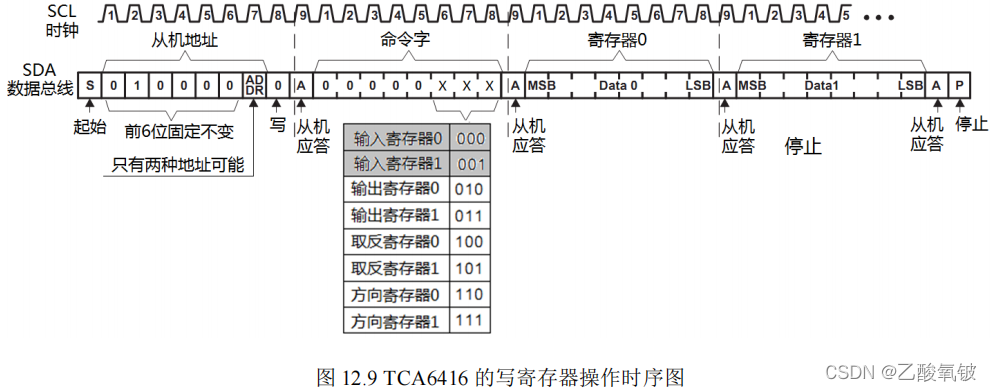
如图 12.9 所示为 TCA6416A 的写寄存器操作时序图。原说明书中将写 IO 与写寄存器分开画图,其实这完全没有必要,写 IO 的本质还是写寄存器。一次完整的写寄存器分 4 部分:
- 从机地址:从机地址的前 6 位固定为 010000,为什么不定成 000000 呢?这是因为如果每种类型的 I2C 从机设备都从 000000 起始的话,那地址就区分不开了,所以每种 I2C 设备都会跳开一段地址赋值。第 7 位是真正的地址,只有两种可能。第 8 位用于表示读操作还是写操作。
- 命令字:这 8 位实际就是选择写哪个寄存器。高 5 位固定,用低 3 位表示 8 种寄存器。
- 寄存器 0:先写寄存器 0,高位在前,低位在后。
- 寄存器 1:后写寄存器 1。
TCA6416A 读数据
单片机在真正读 TCA6416A 数据前,需要写命令告诉 TCA6416A 是操作哪个寄存器。然后才是真正的读数据。写命令需要 2 字节,从机地址+命令。读数据需要 3 个字节,从机地址+低位数据+高位数据。

TCA6416A 的 IO 输入寄存器
如图 12.11 所示为读 IO 输入寄存器的“读数据”操作时序图部分(即为图 12.10 的后半部分,不包括写命令部分)。为了把个各种异常情况下的现象都描述清楚,图 12.11 做的非常复杂。
只需注意,图中 IO 电平共变化了 5 次,而实际被单片机读到的却是两次锁存 IO 电平时刻对应的数据 Data1 和数据 Data4。
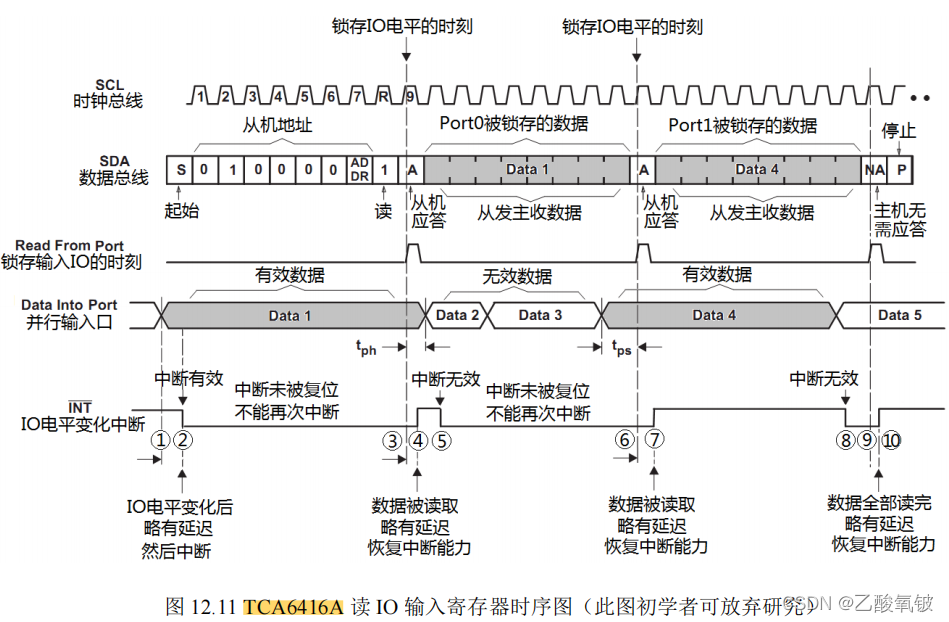
为了模拟普通 IO 的输入中断,TAC6416A 启用了一个类似的/INT 中断来提示输入 IO 有变化。但是由于 IO 输入的变化速度可能远高于读 IO 输入寄存器的速度,所以,TAC6416A的中断和单片机的 IO 外部中断还不太一样。输入 IO 的变化可以触发/INT 产生下降沿变成低电平,但是/INT 要等 I2C 的应答位才能恢复高电平(重新具备中断能力)。也就是说,TCA6416A 的/INT 中断无法响应快速变化的输入信号,当然我们也可以不用中断的方法判断IO 输入,定时扫描的方法同样适用于 TCA6416A。
硬件布局
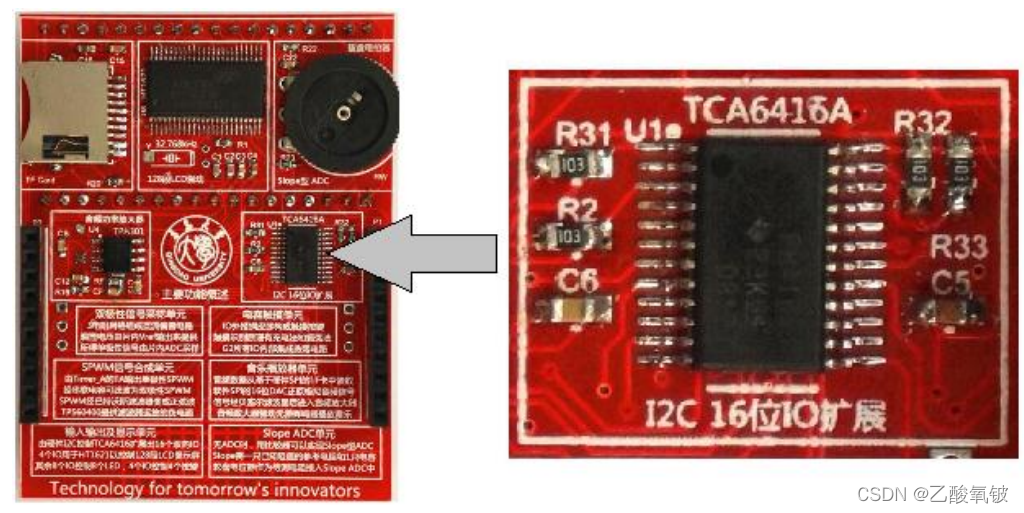
如图所示,扩展出 16 个 IO 口中,8 个作为输出口用于控制 8 个 LED,4 个作为输
出口用于控制 LCD 驱动器(这个另行介绍),4 个作为输入口用于识别 4 个机械按键。
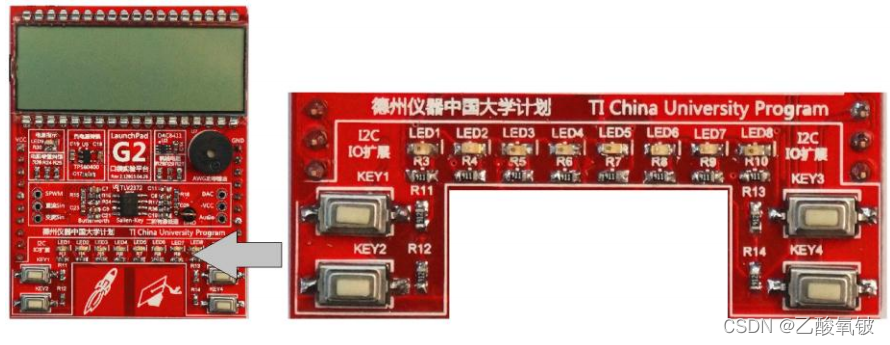
下图所示为 8 个 LED 以及 4 个机械按键在扩展板中的位置
示例程序
stdint.h见【51单片机快速入门指南】1:基础知识和工程创建
软件I2C程序见【51单片机快速入门指南】4: 软件 I2C
TCA6416A.c
/*
* TCA6416A.c
*
* Created on: 2013-4-6
* Author: Administrator
*/
#include "./Software_I2C/Software_I2C.h"
#define TCA6416A_ADDR 0x20 /*从机TCA6416A的7位地址*/
//-----控制寄存器定义-----
#define In_CMD0 0x00 //读取管脚输入状态寄存器;只读
#define In_CMD1 0x01
#define Out_CMD0 0x02 //控制管脚输出状态寄存器;R/W
#define Out_CMD1 0x03
#define PIVS_CMD0 0x04 //反向控制管脚输出状态寄存器;R/W
#define PIVS_CMD1 0x05
#define CFG_CMD0 0x06 //管脚方向控制:1:In;0::Out。
#define CFG_CMD1 0x07
volatile unsigned int TCA6416A_InputBuffer=0;
unsigned char pinW0 = 0xff; //用于缓存已写入相应管脚的状态信息,此操作避免读回TCA6416A中当前寄存器的值
unsigned char pinW1 = 0xff; //用于缓存已写入相应管脚的状态信息,此操作避免读回TCA6416A中当前寄存器的值
void Delay_ms(int i);
/******************************************************************************************************
* 名 称:TCA6416A_Init()
******************************************************************************************************/
void TCA6416A_Init(void)
{
unsigned char conf;
Delay_ms(5); //TCA6416的复位时间比单片机长,延迟确保可靠复位
//----根据扩展板的引脚使用,将按键所在管脚初始化为输入,其余管脚初始化为输出
conf = 0x00; // 0 0 0 0_0 0 0 0 (LED0~LED7)
i2c_mem_write(TCA6416A_ADDR, CFG_CMD0, &conf, 1);
conf = 0x0f; // 0 0 0 0_1 1 1 1 (按键)
i2c_mem_write(TCA6416A_ADDR, CFG_CMD1, &conf, 1);
//----上电先将管脚输出为高(此操作对输入管脚无效)
conf = 0xff; // 某位置1,输出为高,0为低
i2c_mem_write(TCA6416A_ADDR, Out_CMD0, &conf, 1);
conf = 0xff;
i2c_mem_write(TCA6416A_ADDR, Out_CMD1, &conf, 1);
}
/******************************************************************************************************
* 名 称:PinOUT()
******************************************************************************************************/
void PinOUT(unsigned char pin,unsigned char status)
{
if(pin<=7) //所选管脚为pin0~pin7 ,刷新所要操作的输出缓存pinW0 状态
{
if(status == 0)
pinW0 &= ~(1<<pin);
else
pinW0 |= 1<<pin;
i2c_mem_write(TCA6416A_ADDR, Out_CMD0, &pinW0, 1); // 将更新后的数据包,写入芯片寄存器
}
else if(pin>=10 && pin<=17) //所选管脚为pin10~pin17 ,刷新所要操作的输出缓存pinW1 状态
{
if(status == 0)
pinW1 &= ~(1<<(pin%10));
else
pinW1 |= 1<<(pin%10);
i2c_mem_write(TCA6416A_ADDR, Out_CMD1, &pinW1, 1); // 将更新后的数据包,写入芯片寄存器
}
}
/******************************************************************************************************
* 名 称:PinIN()
******************************************************************************************************/
unsigned char PinIN(unsigned char pin)
{
unsigned char temp[2];
i2c_mem_read(TCA6416A_ADDR, In_CMD0, temp, 2); // 读取按键所在管脚信息
TCA6416A_InputBuffer = (((unsigned int)temp[1])<<8)|temp[0];
if(pin<=7)
{
if(temp[0] & (1<<pin))
return 1;
else
return 0;
}
else if(pin>=10 && pin<=17)
{
if(temp[1] & (1<<(pin%10)))
return 1;
else
return 0;
}
}
/******************************************************************************************************
* 名 称:PinToggle()
******************************************************************************************************/
void PinToggle(unsigned char pin)
{
unsigned char status;
if(pin<=7) //所选管脚为pin0~pin7 ,刷新所要操作的输出缓存pinW0 状态
{
status = !(pinW0 & (1<<pin));
if(status)
pinW0 |= 1<<pin;
else
pinW0 &= ~(1<<pin);
i2c_mem_write(TCA6416A_ADDR, Out_CMD0, &pinW0, 1); // 将更新后的数据包,写入芯片寄存器
}
else if(pin>=10 && pin<=17) //所选管脚为pin10~pin17 ,刷新所要操作的输出缓存pinW1 状态
{
status = !(pinW1 & (1<<(pin%10)));
if(status)
pinW1 |= 1<<(pin%10);
else
pinW1 &= ~(1<<(pin%10));
i2c_mem_write(TCA6416A_ADDR, Out_CMD1, &pinW1, 1); // 将更新后的数据包,写入芯片寄存器
}
}
TCA6416A.h
/*
* TCA6416A.h
*
* Created on: 2013-4-6
* Author: Administrator
*/
#ifndef TCA6416A_H_
#define TCA6416A_H_
extern unsigned char PinIN(unsigned char pin);
extern void PinOUT(unsigned char pin,unsigned char status);
extern void PinToggle(unsigned char pin);
extern void TCA6416A_Init();
extern volatile unsigned int TCA6416A_InputBuffer;
#endif /* TCA6416A_H_ */
测试程序
一个LED闪烁,另一个LED由KEY控制翻转。
main.c
#include <STC89C5xRC.H>
#include "intrins.h"
#include "stdint.h"
#include "TCA6416A.h"
void Delay1ms() //@11.0592MHz
{
unsigned char i, j;
_nop_();
i = 2;
j = 199;
do
{
while (--j);
} while (--i);
}
void Delay_ms(int i)
{
while(i--)
Delay1ms();
}
void main(void)
{
uint16_t delay_count = 0;
TCA6416A_Init();
while(1)
{
if(!PinIN(10))
{
Delay_ms(20);
if(!PinIN(10))
{
PinToggle(1);
while(!PinIN(10));
}
}
if(++delay_count == 500)
{
PinToggle(7);
delay_count = 0;
}
Delay_ms(1);
}
}
实验现象
















 732
732











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











