







Abstract
Dense 3D representations of the environment have been a long-term goal in the robotics field.
While previous NeRF representation have been prevalent for its implicit, coordinate-based model, the recent emergence of 3DGS has demonstrated remarkable potential in its explicit radiance field representation.
By leveraging 3D Gaussian primitives for explicit scene representation and enabling differentiable rendering, 3DGS has shown significant advantages over other radiance fields in real-time rendering and photo-realistic performance, which is beneficial for robotic applications.
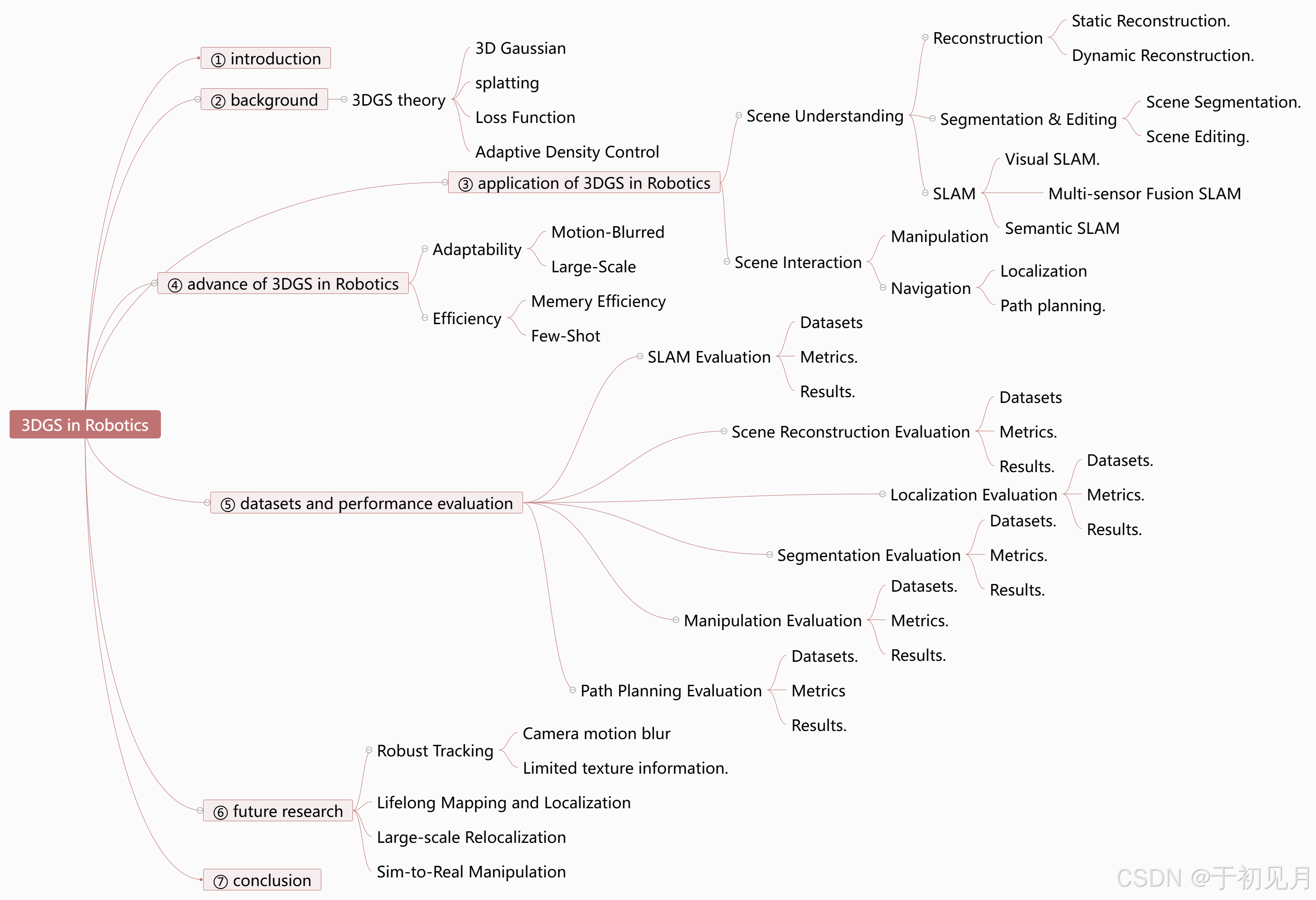
FUTURE RESEARCH
Robust Tracking
Existing 3DGS-based SLAM methods, although demonstrating high accuracy in dense mapping, typically fail to achieve accurate and robust tracking, especially in complex real-world scenarios.
This limitation in current 3DGS-based SLAM systems is due to their reliance on directly using RGB information of image for pose optimization.
Such reliance heavily depends on the quality and texture information of the images.
However, in real-world robotic applications, image quality is prone to camera motion blur, degrading the performance of 3DGS-based SLAM.
Moreover, there are some scenes with limited texture information, such as sky or walls, leading to insu
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











