








公司做ar业务,要加入虹膜位置检测功能。如果虹膜位置靠上或者靠下,影响后面代码的执行,不考虑ai算法的情况下我就考虑用传统算子搞定。
ps:我是菜鸡,还希望大佬们指点。。。。
首先我也是参考了github上一位大佬的核心思想,先用cv的轮廓检测,但是由于摄像头会捕捉到一些额外的无用信息,比如光斑,镜框,睫毛等这些。

这个眼是不是还挺大。。😂
那么这么多无用信息 到底该选择哪个呢?当时我也是考虑了很久 然后又仔细看了一下github上的资料(你们可以叫我粘合怪~~)。。。很快啊~~想出了一个办法,找每个轮廓的最大外界矩形,然后求他的长宽比,设定一个阈值,我设置的是小于<0.2,这样就可以定位出一个标准的圆,那么图中的很多无用信息就被删掉了。
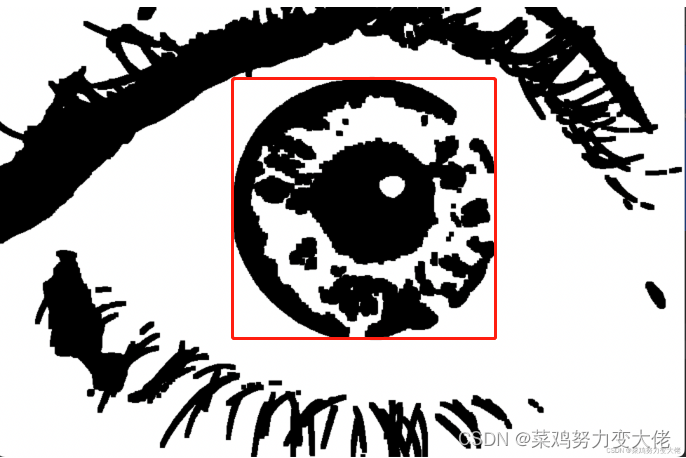
这样就可以定位出瞳孔的中心坐标了吧。。。正方形的交叉位置就差不多是了吧(医学大佬们帮我解答一下,瞳孔和虹膜是一起动把,不会各走各的把。。。。。我自己是这么认为的)
然后我算的是图像的大小,我的是600x400,看坐标落在什么区域内就好啦。。
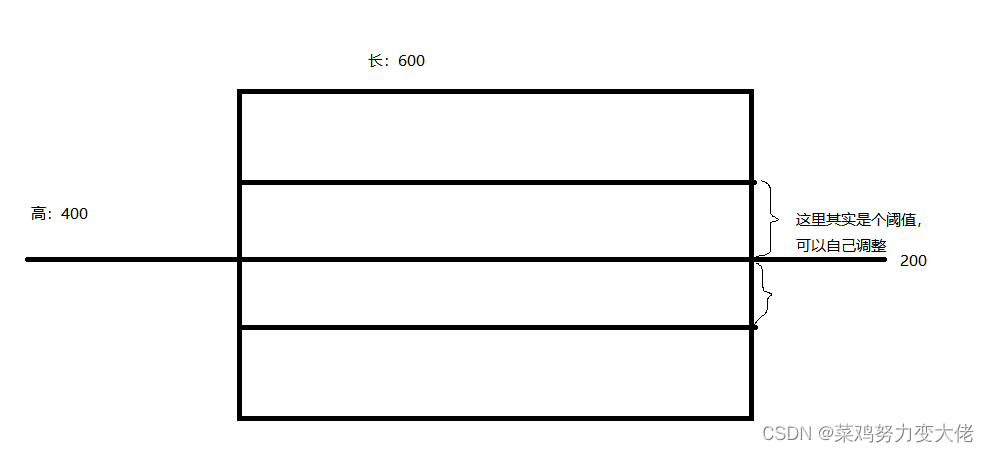
如果中心坐标的y值(以左上角为0点)在阈值上方,则虹膜位置靠上,阈值下方,则虹膜位置靠下。
我自己想的原理大概就是这样。。。 (欢迎指正)
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace std;
using namespace cv;
std::vector<std::vector<Point>> contours;
std::vector<Vec4i> hireachy;
float pupilDetec()
{
Mat gray, res1, res2, res3;
double area = 0;
double angle = 0;
float ratio = 0;//宽高比
Mat src = xxxxxx;//我是数据流过来的,如果你们是读的图片可以改这里。
cvtColor(src, gray, CV_BGR2GRAY);
bilateralFilter(gray, res1, 25, 25*2, 25/2);
equalizeHist(res1, res2);
threshold(res2, res3, 50, 255, CV_THRESH_BINARY);
Mat element = getStructuringElement(MORPH_RECT,Size(7, 7));
morphologyEx(res3, res3, MORPH_ERODE, element,Point(-1, -1));
Mat res5 = res3.clone();
findContours(dst5, contours, hireachy,RETR_TREE,CHAIN_APPROX_SIMPLE, Point());
int center_t = src.rows / 2;
for (int i = 0; i < contours.size(); i++)
{
double area = contourArea(contours[i]);
Rect rect = boundingRect(contours[i]);
int radius = rect.width / 2;
if (area >= 20 && abs(1 - ((double)rect.width / (double)rect.height)) <= 0.2 && abs(1 - (area / (CV_PI * pow(radius,2)))) <= 0.2)
{
int x = rect.x + radius;
int y = rect.y + radius;
if (y <= center_t + 80 && y >= center_t - 80){
return 1.0;//虹膜位于图像正中
}
if (y >= center_t + 80){
return 2.0;//虹膜位于图像下方
}
if (y <= center_t - 80){
return 3.0;//虹膜位于图像上方
}
}
}
return 0.0;
}


















 7023
7023

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









